SER01989020_YV112III Service_J.pdf - 第38页
3- 17 SER01989020 調整 第 3 章 1 1 . 2 機械座標 「3 / 3 / B 1 調整項目選択」→「機械座標」 を選択実行すると、下図のように機械 座標(原点からの各部の位置座標など)の画面が表示されます。この画面上で、 それぞれの機械座標の設定値をティーチングまたは編集できます。以下に主な項 目の設定方法を説明します。 (その他の項目については、キーボードの [ F 1 ] キーを押して操作ディスプレイに表示さ…
3-
16
SER01989020
調整
第
3
章
1
1.1.3 真空センサーの機能の確認
以下の手順で真空センサーの機能を確認します。
1
前述のStep 1 ∼3で対象ヘッドの真空発生器を動作させてお
きます。
2
「3/4/ 手動」→「A3 真空センサー」コマンドを実行します。
操作ディスプレイに真空センサーレベルが表示されます。
■真空センサーレベル表示
60143113-00
<コマンドリスト> A/状態選択
真空センサーレベル
現在値
137
0
0
0
0
0
上限値
187
0
0
0
0
0
下限値
3
0
0
0
0
0
ヘッド
A1
A2
A3
A4
A5
A6
3
対象ヘッドを選択します。
矢印キーを使って、画面表示を「A1 ∼A12」(A テーブル)または「B1 ∼
B12」(B テーブル)の対象ヘッドに合わせます。
4
吸着センサーの機能を確認します。
対象ヘッドのノズル先端開口部に指を当てたり離したりして、対応する吸着セ
ンサーの「現在値」表示(棒グラフと数字)が変化することを確認します。吸
着センサーが正常であれば、ノズル開口部を指で塞いだときに表示レベルが上
がります。
5
出力モニター画面に戻り、対象ヘッドの吸着動作を止めます。
対象ヘッドにカーソルを合わせ、[ENTER] キーを押すと、真空発生器が止まり
ます。
3-
17
SER01989020
調整
第
3
章
1
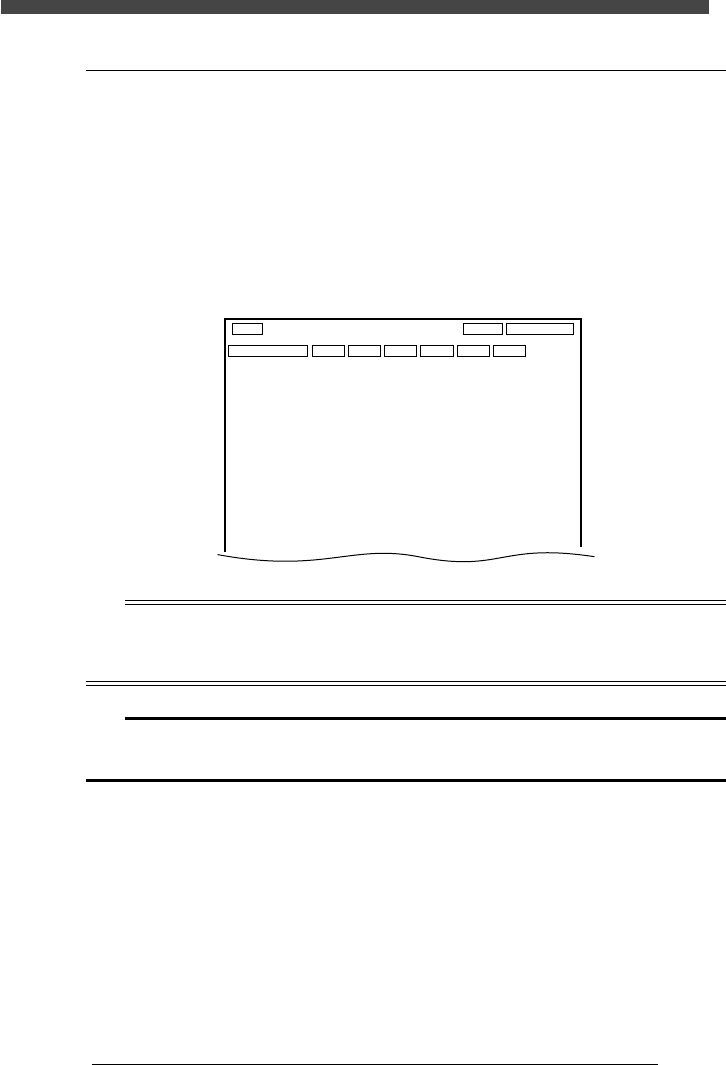
1.2 機械座標
「3/3/B1 調整項目選択」→「機械座標」を選択実行すると、下図のように機械
座標(原点からの各部の位置座標など)の画面が表示されます。この画面上で、
それぞれの機械座標の設定値をティーチングまたは編集できます。以下に主な項
目の設定方法を説明します。(その他の項目については、キーボードの [F1]
キーを押して操作ディスプレイに表示されるヘルプメッセージを参照してくださ
い。)
■ 機械座標画面
60143101-01
対象名
X
機械座標
マルチカメラ
ロケートピン基準 A
基板外形基準 A
廃棄位置 A
基板面/固定トレイ A
両方向認識 オフセット A
同時吸着範囲 A
QFP装着浮代 A
リトライ回数の上限 A
廃棄ステーション位置 A
ロケートピン基準 B
基板外形基準 B
廃棄位置 B
基板面/固定トレイ B
両方向認識 オフセット B
同時吸着範囲 B
YZ
編集中
0.00
18.30
0.50
0.00
19.30
0.50
1000.00
127.35
127.35
75.50
0.00
0.50
0.00
-524.79
-524.79
-37.41
0.00
0.50
866.31
866.31
791.84
0.00
0.50
0.00
546.16
546.16
300.27
0.00
0.50
R
フィーダー
0.00
0.00
0.00
15.00
0.00
1.00
0.00
0.00
0.00
0.00
1.00
30
30
30
種類
間欠タイプ
通常
4.00
7回
通常
編集対象
参考
機械座標画面は、「3/2/A1 編集切替」→「機械座標」を選択実行しても開くことができます。
(通常、パスワード設定により、マシンデータ編集モードの使用はマシン調整モードよりも制限さ
れています。
c
注意
機械座標データは、納入機の仕様に合わせて出荷時に最適化されています。通常は変更しないでく
ださい。もし変更する必要がある場合は、以下に説明する手順を参考に正確に調整してください。

3-
18
SER01989020
調整
第
3
章
1
1.2.1 マルチカメラ
マルチカメラY
部品認識の際にヘッド部がマルチカメラ上を動くスピードを表します。この値
は、マルチカメラの照明輝度を考慮して、出荷時に1,000前後に設定されてい
ますので変更しないでください。
マルチカメラZ, R
Z 座標がB テーブル、R 座標がA テーブルのカメラの角度ズレを修正するパラ
メーターになっています。通常0.00に設定します。
1.2.2 ロケートピン基準
基板を搭載位置へ固定するときの基準位置となる座標です。移動カメラを使って
固定ロケートピンの中心をティーチングします。
1
ロケートピンを上昇させます。
1.「3/4/C1 出力モニター」を選択実行します。
2. カーソルを「TN03」(ロケートピン1)に合わせ、[ENTER] キーを押しま
す。
「TN03」の出力表示は、ロケートピンが上昇すると "1" に変化します。
2
マシン調整モードに入り、「3/3/B4 ティーチング実行条件」
を指定します。
ティーチングユニットは「カメラ」、運転速度は「どれを選択してもかまいま
せん。
参考
マシン調整モードでティーチング実行条件を指定する場合、運転速度はどれを選択しても、安全の
ため最初は最低速度(SPEED 5=20)に設定されます。速度を変更するには、ティーチング実行条
件を指定した後、YPUの [SPEED] キーを押してください。
3
機械座標画面を開きます。
「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。
4
カーソルを「ロケートピン規準」の「X」に合わせます。
60143121-00
対象名
X
機械座標
マルチカメラ
ロケートピン
基準 A
基板外形基準 A
廃
棄位置 A
基板面/固定トレイ A
両
方向認識 オフセット A
YZ
編集中
0.00
18.30
1000.00
127.35
127.35
75.50
0.00
866.31
866.31
791.84
0.00
R
フィーダー
0.00
0.00
0.00
15.00
0.00
30
種類
間欠タイプ
通常
編集対象