SER01989020_YV112III Service_J.pdf - 第95页
3- 74 SER01989020 調整 第 3 章 3 0 [ENTER] キーを押します。 移動カメラが X 方向と Y 方向に移動します。 ビジョンディスプレイ内の移動 量に基づいてカメラスケールが計算され、下図のように結果が表示されます。 ロケートピンやプッシュアップは、測定が終了すると自動的に解除されます。 60043311-00 <<モード>> 3/マシン調整 A431 移動カメラのスケールの調整結…
3-
73
SER01989020
調整
第
3
章
3
e
6
使用する基板をコンベアにセットします。
前述の補助調整のときに基板をセットしてあれば、[ESC] キーを押してStep 8
へ進んでください。([ESC] キーを押すと、ロケートピンやプッシュアップが
一時的に解除されます。)
基板がセットされていないときは、非常停止ボタンを押してからロケートピン
やプッシュアップを調整してください。
7
[ENTER] キーを押します。
ロケートピンやプッシュアップが上昇して基板が固定されます。
(前ステップで非常停止状態をかけた場合はそれを解除し、YPU の [READY]
ボタンを押してください。)
e
8
安全を確認して、[ENTER] キーを押します。
ヘッド部が基板原点上へ移動し、操作ディスプレイには下図の画面が現れま
す。
60043309-00
<<モード>> 3/マシン調整
A427
<<<基板固定&軸移動中>>>
基板の固定と軸の移動中です。
・・・
A428
<<<ティーチング>>>
フィデューシャルマークの位置をティーチングします。
ジョイスティックによって、フィデューシャルマークをモニター画面中央の・・・
9
フィデューシャルマークを画面の中央に合わせます。
YPU のジョイスティックを操作して、ビジョンディスプレイのクロスカーソ
ルに合わせてください。
d
60043305-00
3-
74
SER01989020
調整
第
3
章
3
0
[ENTER] キーを押します。
移動カメラがX 方向と Y 方向に移動します。ビジョンディスプレイ内の移動
量に基づいてカメラスケールが計算され、下図のように結果が表示されます。
ロケートピンやプッシュアップは、測定が終了すると自動的に解除されます。
60043311-00
<<モード>> 3/マシン調整
A431
移動カメラのスケールの調整結果を表示します。
結果を残したい場合には「ENTER」キーを、
破棄したい場合「ESC」を押してください。
スケールx
スケールy
角度r
=
=
=
xx.xx
yy.yy
rr.rr
q
結果を残したい場合は、[ENTER] キーを押します。
結果を破棄したい場合は、[ESC] キーを押してください。
w
調整データを保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終
了」を選択実行してください。)
e
e
非常停止ボタンを押してから、基板を取り除きます。
3-
75
SER01989020
調整
第
3
章
3
3.2 マルチ認識カメラ
YV112では、マルチ認識カメラと呼んでいる1 次元CCD カメラで部品を高速
認識しています。マルチ認識カメラの調整では、下記の項目をデータマネー
ジャーの「補助調整」とマシン調整モードのユーティリティを使って最適化しま
す。
■ マルチ認識カメラの調整項目
40143304-00
視野
ピント&絞り
照明光量
カメラスケール
スケールとデータマネージャーの「補助調整」を使用
フォーカスアジャスタ(KM1-M8803-100)を使用
ライトアジャスタ(KM1-M8806-000)を使用
形状が正確に分かっているSOPを使用
調整項目 備 考
3.2.1 視野の調整
以下の手順でマルチ認識カメラの視野を調整します。あらかじめ、非常停止状態
でマルチカメラのカバーを取り外し、ヘッド1 にQFP 用のノズル(タイプ54
など)を取り付けてください。また、ズルに吸着させやすい金属スケールを用意
してください。
1
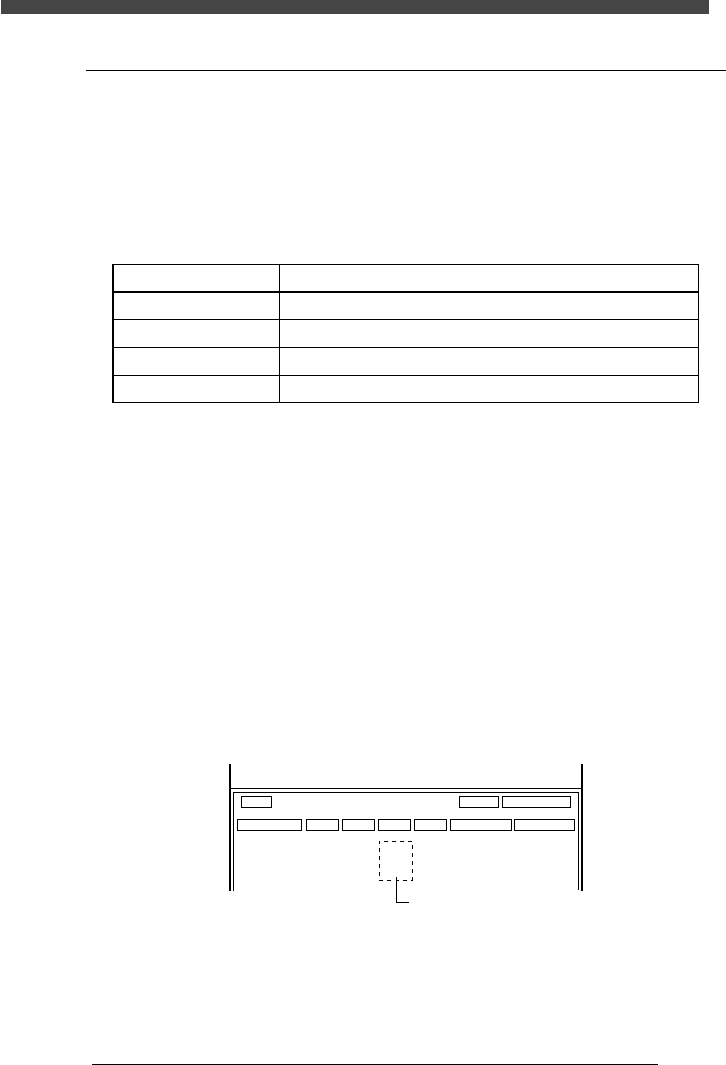
「カメラ位置座標」の「マルチ認識カメラ Z」を確認します。
「3/2/A1 編集ファイル切替」→「カメラ位置座標」を選択実行し、「マルチ
認識カメラ Z」が「機械座標」画面の「基板/ 固定トレイ」の「Z」と同じ高
さであることを確認します。異なっていたら数字キーで修正し保存してくださ
い。
60143329-00
<<モード>> 2/マシンデータ編集
Y
カメラ位置座標
移動カメラ Aテーブル
マルチ認識カメラ 1A
移動カメラ Bテーブル
マルチ認識カメラ 1B
XZ
R
0.00
0.00
0..00
0.00
10.00
10.00
0.17
-0.19
1.16
0.44
25
25
最大部品XY
7
7
最大部品Z
-78.37
434.32
78.10
653.50
カメラ番号
編集中
編集対象
基板面の高さ(Z)と同じ