松下CM识别方式完整版手册_1F88E.pdf - 第47页
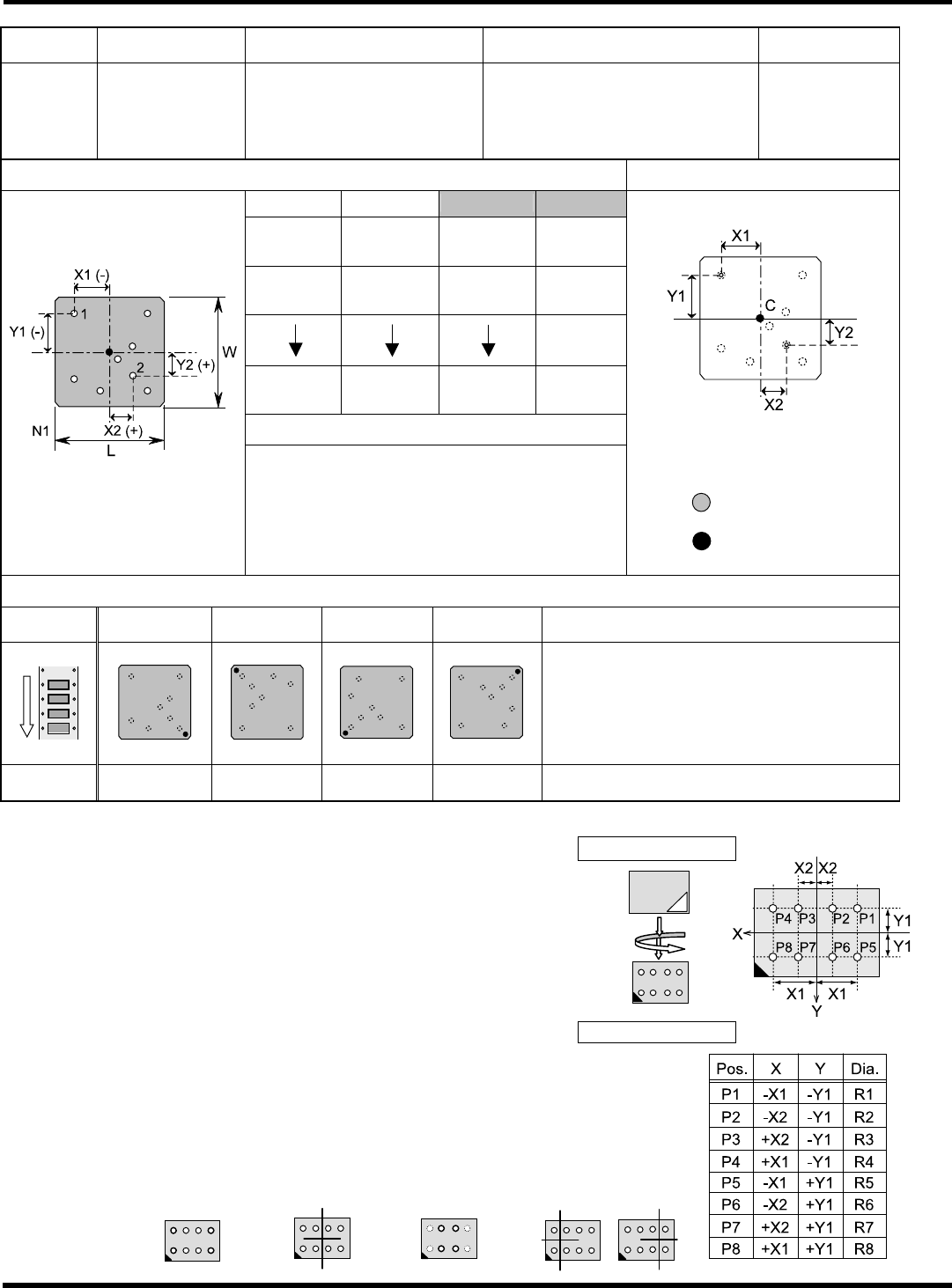
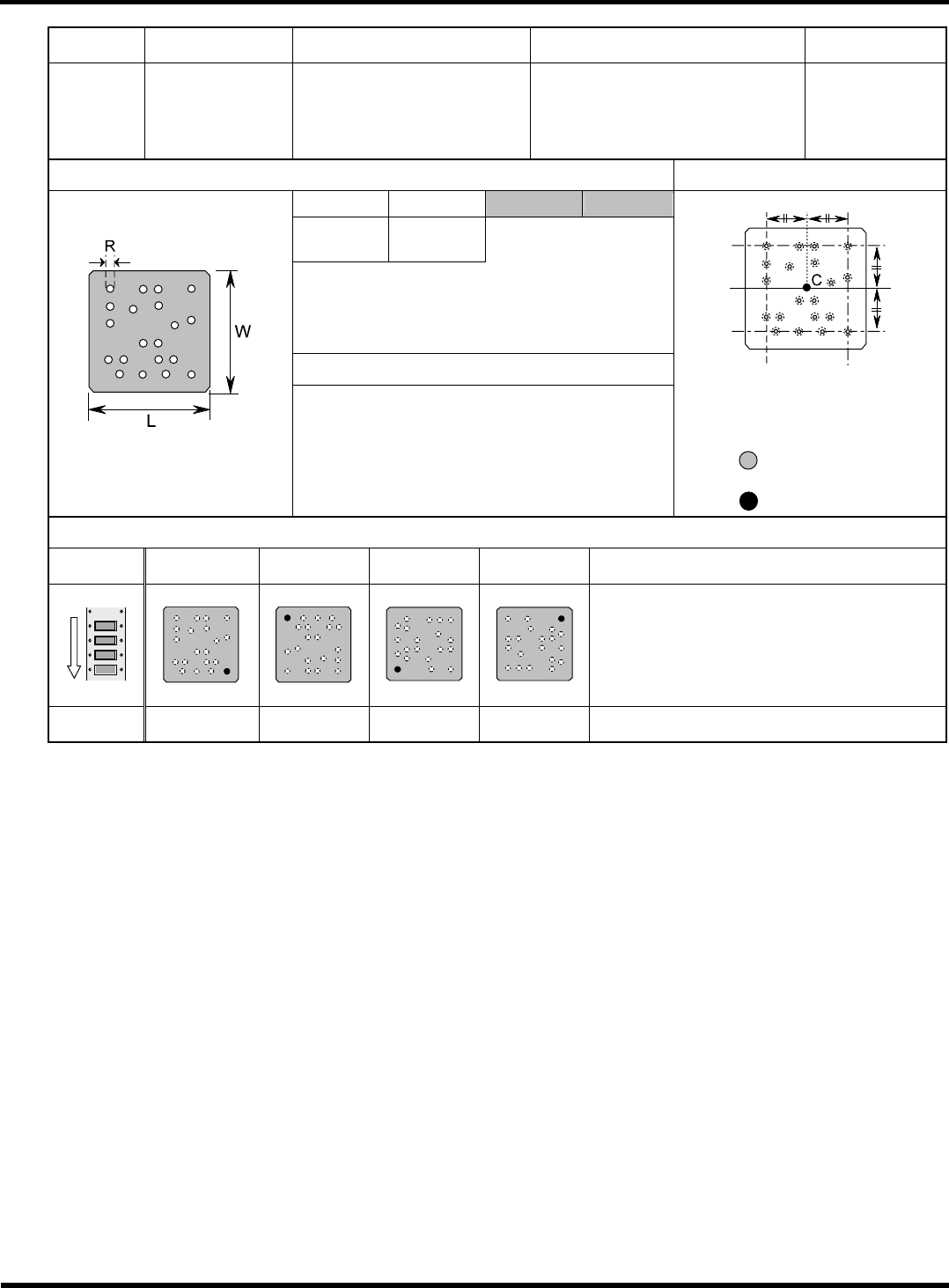
HGR14 附录 1.3 按形状输入数据项目 附录 1-4 7 形状编号 对象形状 参考编号 对象部品 ( 类别 ) 对应 Ve r. 4j 配置于不定位置 的焊 锡球 2 237 ~ 238 FC-BGA 等 V7.02 以上 形状以及输入数据 识别方式以及结果 长度 L 宽度 W 球直径 R 球直径容许 判断标准 1) 长度 : L ± (20%) 2) 宽度 : W ± (20%) 3) 球直径 : R ± ( 球直径容许值 ) …
HGR14
附录 1.3 按形状输入数据项目
附录 1-46
HGR14-007E
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
4i
配置于不定位置的焊
锡球
1
222
倒装芯片
等
V7.02
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
球位置
X1
球位置
Y1
球直径
R1
球位置
X2
球位置
Y2
球直径
R2
球位置
X8
球位置
Y8
球直径
R8
判断标准
1)
球直径:
R
±
(
球直径容许值
)
等
(Bottom view)
在指定球中心识别
:
检测位置
:
检测中心
可识别姿势
(
只可识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(备注)
1.
下面显示对象部品的识别方面的极限值。
部品俯视图
1) 最小球直径:
φ
0.1 [mm] (最大 0.3 [mm]左右)
2) 最小邻接球之间距离: 球直径
×
1.6 [mm]
3) 球位置: 通过位置坐标数据指定
4) 识别球数: 2 ~ 8 [个]
向横向反转的图
2. 输入数据时的注意事项
1) 输入球坐标 (参照右图)
请输入将式样角度为 0
°
状态的部品向横向反转时的部品中心的
球坐标。
2) 请细心选择电极位置,以避免出现类似组合。
好例子: 没有类似组合 不好例子:误识别类似位置关系的电极
(指定球位置) (识别结果) (指定球位置) (识别结果)
HGR14-C-PMB01-A02-01
HGR14-023E
HGR14
附录 1.3 按形状输入数据项目
附录 1-47
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
4j
配置于不定位置的焊
锡球
2
237 ~ 238 FC-BGA
等
V7.02
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
球直径
R
球直径容许
判断标准
1)
长度
: L
±
(20%)
2)
宽度
: W
±
(20%)
3)
球直径
: R
±
(
球直径容许值
)
4)
角度
:
识别角度
±
35[
°
]
等
(Bottom view)
在指定行列的球中心定位
对其他球进行有无检测
:
检测位置
:
检测中心
可识别姿势
(
只可识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(备注)
1. 需要通过生产数据示教进行使用部品的示教。
关于示教步骤,请参照下页以后的‘非格子排列 BGA 示教步骤’。
HGR14-C-PMB01-A02-01
HGR14
附录 1.3 按形状输入数据项目
附录 1-48
�
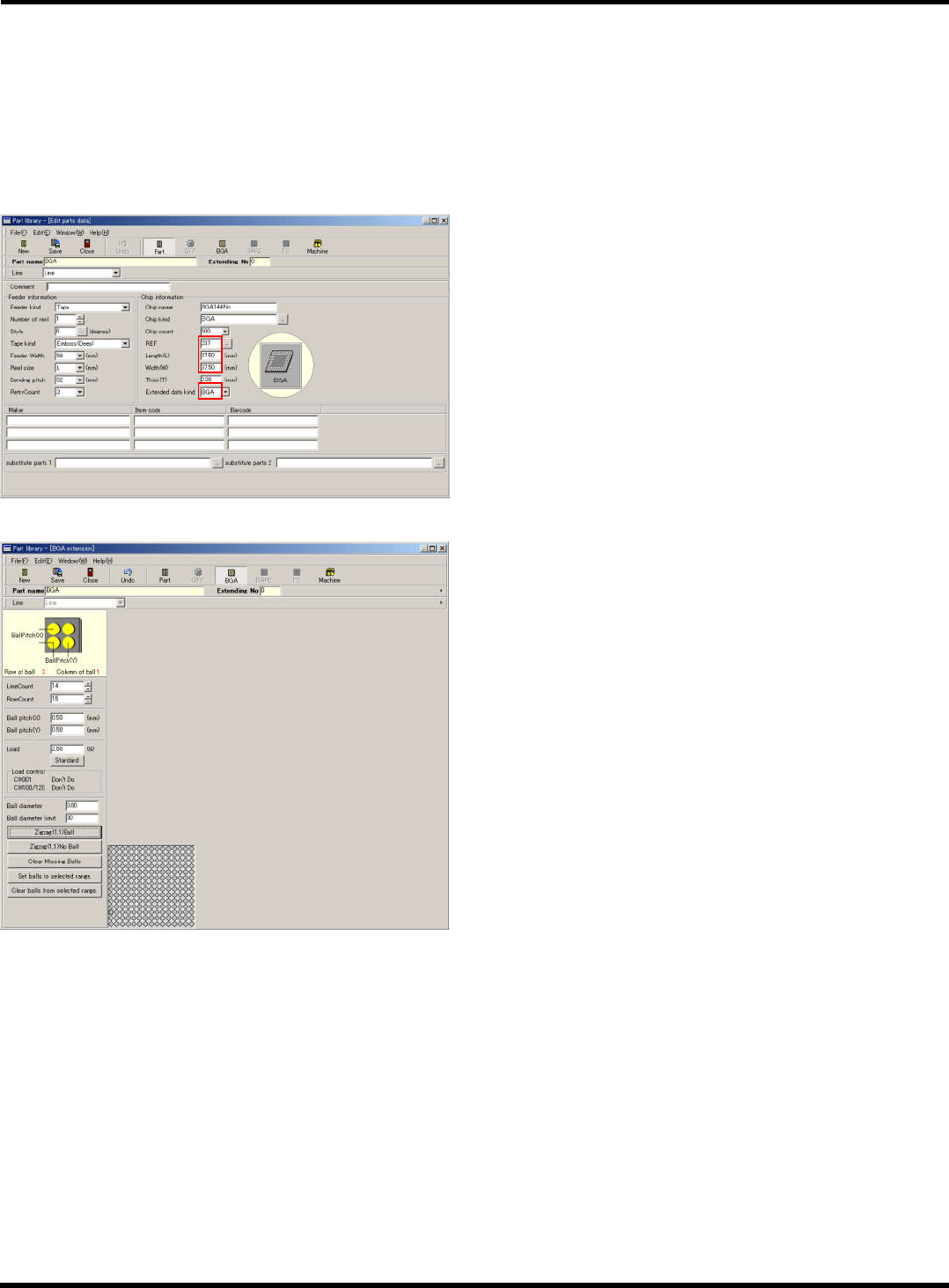
非格子排列
BGA
示教步骤
对未配置于格子状的 BGA/
µ
BGA (CSP) 等背面焊锡球部品需要的部品示教步骤进行说明。
<准备>
1.
准备要实装的部品。
2.
通过 PT 登记带有 BGA 扩展数据的部品。
∗
在此只记载对识别需要的项目。
输入项目
• REF: 237/238
• Width (宽) W
• Length (长) L
• Expansion data type: BGA expansion
(扩展数据种类: BGA 扩展)
BGA expansion (BGA 扩展)
• Ball diameter (球直径)
• Ball diameter limit (球直径容许值)
3.
由 PT 将数据转送到机器。
∗
此后的作业是通过机器的示教作业。
请用供料器或托盘向机器供给对象部品。
HGR14-C-PMB01-A02-01
9Q4C-EPt-Pl-001
9Q4C-EPt-Pl-002