神州视觉aleader阿立得ALD620-AOI编程手册1.pdf - 第12页
2.3AOI 的坐标系统 坐标之间的关系: 1)机器原点:机械复位的初始原点,不可更改。 2)PCB 加载位置:其位置坐标相对于机器原点。每测完一块 PCB 机器会自动回到加载位置即系统 设置中停机位置。 3)软件限位:是继驱动器限位和运动控制卡限位的第三重限位,其坐标相对于机器原点。 4)坐标原点:其坐标位置相对于机器原点,通常为 PCB 的左 下角位置。在数据库中,每个元件的 坐标为相对于坐标原点位置。 5)MA…
2.1 设备的安装
2.1.1 调整设备水平
设备移动到目的地后,可以将地脚放下,利用水平尺(工具)放置于平台,调整水平;减少机台振动。
正确调整水平,可以令设备运行更顺畅,噪声更小,寿命更长。
调机器水平步骤如下:
a. 令机器四只地脚悬空,将设备移动到目的地。
b. 先调整机器的左右水平:因机器的重心在后方,因此调整机器后方的两只地脚。
c. 接着调整机器前后水平:只需调前方的一只地脚即可,因为三点决定一面。
d. 将剩下悬空的地脚旋下并稍微多拧一下,将共 4 个地脚的固定螺母锁紧。
注意:三个地脚下地来调整水平会为快捷、有效。
2.2 设备的定期保养
☆
:
电源电压要求是 220V 交流电,通常不能使用和 SMT 炉子相连的电源,因为炉子的电压会随
温度经常变化,建议使用独立电源!设备上使用了开关电源,所以会产生感应电流约在 10-50V。而当
我们设备外壳完好接地的情况下,才能正常使用。否则可能会在机器外壳上没有油漆的地方,有“被
电”的感觉。所以我们设备是
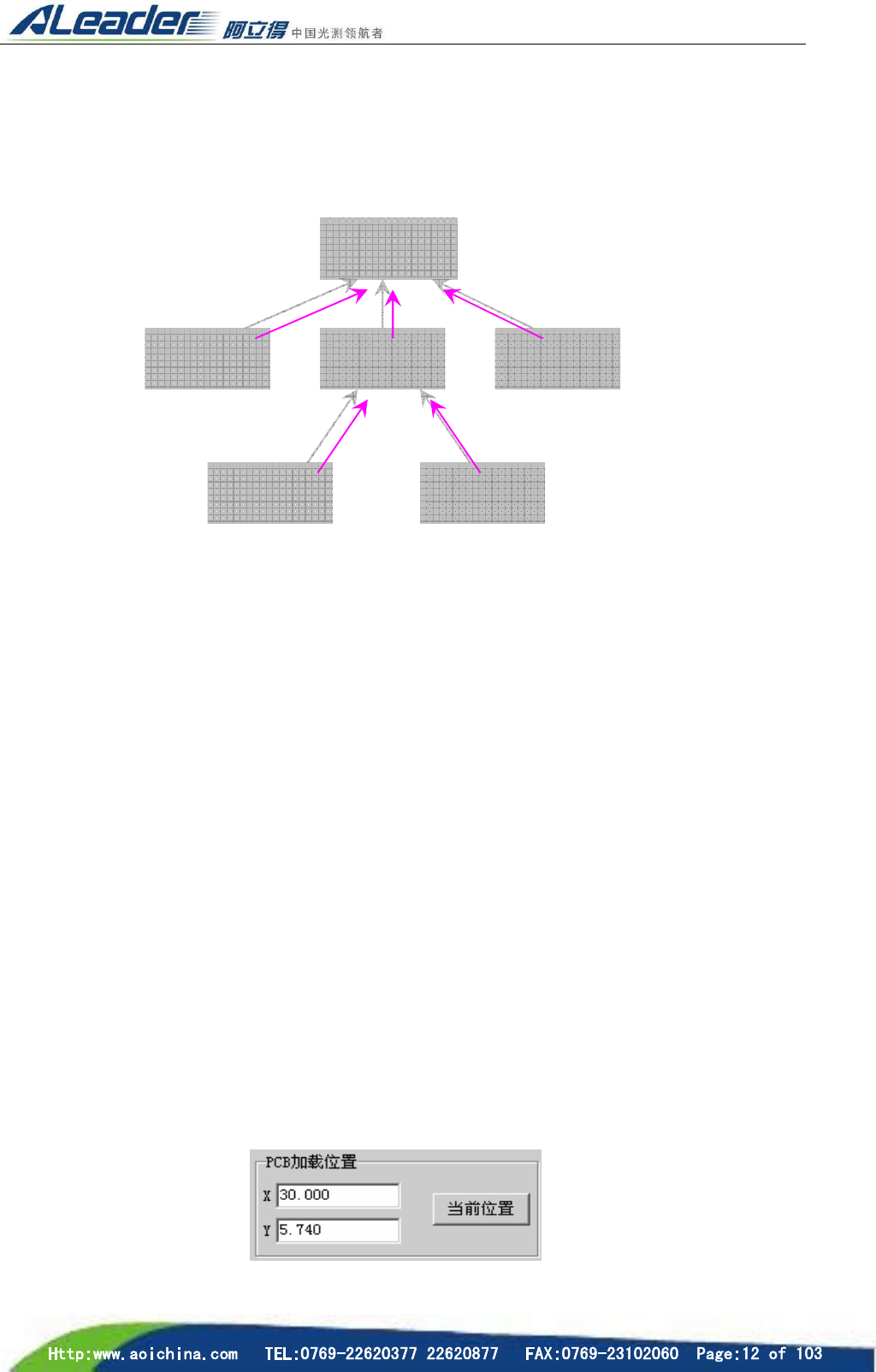
2.3AOI 的坐标系统
坐标之间的关系:
1)机器原点:机械复位的初始原点,不可更改。
2)PCB 加载位置:其位置坐标相对于机器原点。每测完一块 PCB 机器会自动回到加载位置即系统
设置中停机位置。
3)软件限位:是继驱动器限位和运动控制卡限位的第三重限位,其坐标相对于机器原点。
4)坐标原点:其坐标位置相对于机器原点,通常为 PCB 的左下角位置。在数据库中,每个元件的
坐标为相对于坐标原点位置。
5)MARK 点坐标:其坐标相对于原点坐标(定义请详见 MARK 设置章节)
6)元件坐标:是元件的坐标位置,相对于原点坐标
2.4 机器复位
机器复位是让系统找到坐标参考点即机器原点。
1) 启动程序 AOI.EXE 时,机器自动复位,即机器自动回到机器原点位置。
2) 菜单中的复位。选择菜单“运动控制”栏下的“机器复位”即可。
2.5 置 PCB 加载位置
PCB 加载位置的设置是为了便于 PCB 板的取放。机器出厂前PCB 板的加载位置已设置好,一般不需更
改。若已有的设置不实用时,可以对 PCB 板的加载位置进行适当的设置。具体步骤如下:
在测试窗口中按移动按钮,使 X/Y 平台移到便于放 PCB 板的位置后,点击菜单〔系统设置〕→〔系统
设置〕,在 PCB 加载位置栏按当前位置,则 PCB 加载位置设置完成。
机械原点
坐标原点加载位置 软件限位
MARK 点 元件坐标
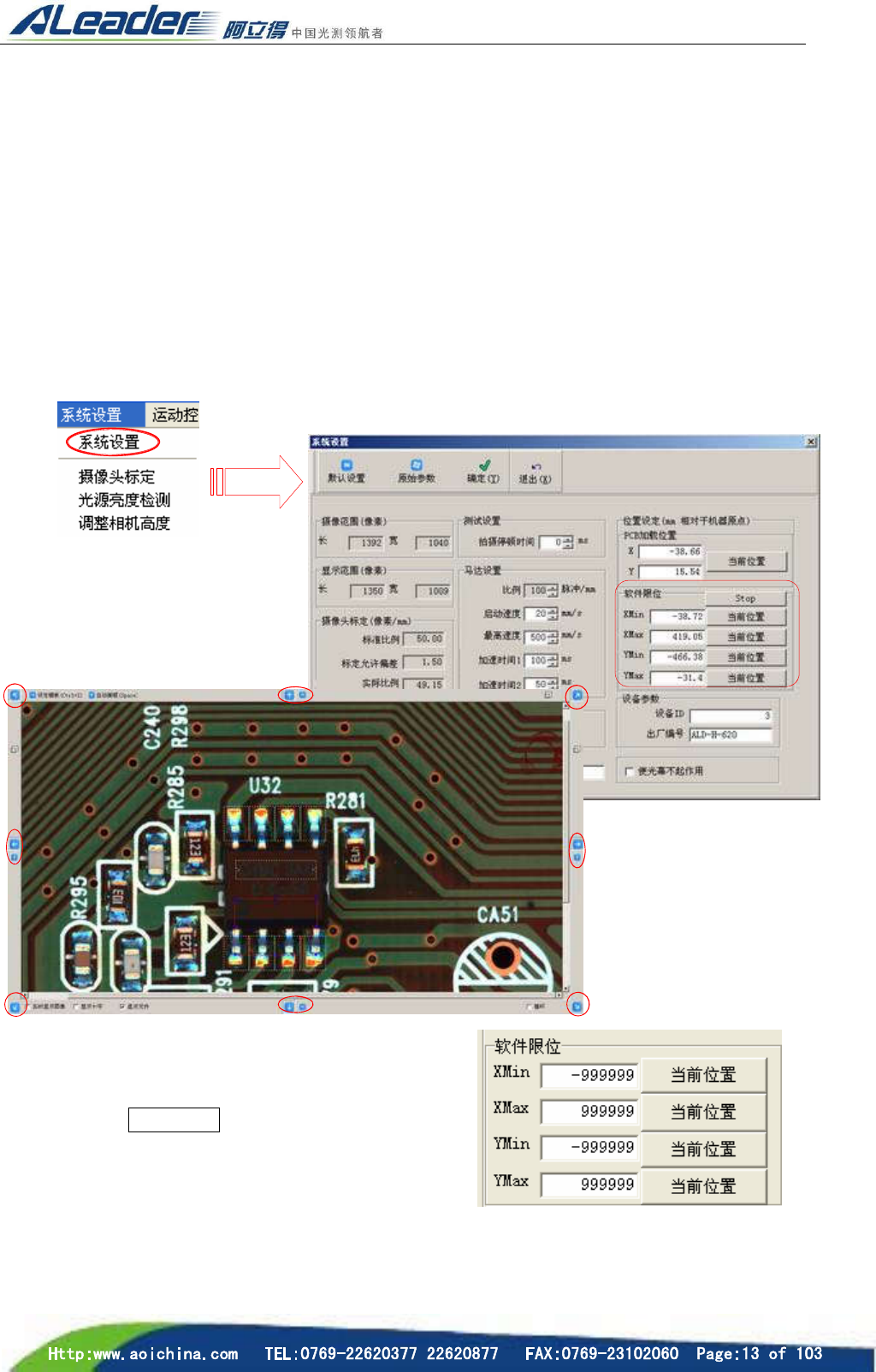
2.6 软件限位设置
为了保护 X/Y 驱动系统,机器设备设置了三重限位保护措施:
1) 驱动器限位。
2) 运动卡限位。
驱动器限位和运动卡限位是通过限位开关实现的,两种限位开关独立工作,只要任意一个限位开
关起作用,都可停止马达运动从而达到保护目的。
3)
软件限位。软件限位是除了驱动器限位开关、运动卡限位开关后的第3道防线,是为了防止马达在
运行过程中超过机械范围而造成设备物理性的损害。同时如果不能正确设置软件限位,还可能导致
在测试过程中有些位置无法到达。
软件限位设置步骤如下:
点击菜单“系统设置”栏下的“系统设置”项打开系统设置窗口。
用四边的按钮移动方向,
点左边的按钮X轴 向左移
动,直到撞上限位开关而
停止,然后反向按向右移
动1mm的按键使X轴向右往
回移动1mm(小按钮走1MM)
点击菜单“系统设置”栏下的“系统设置”项打开系统设置
窗口
在 Xmin 栏点击当前位置,把 X 轴的当前位置设置为 X
轴可以到达的最左边的软件限位。按确定关闭系统设置窗
口。
同理对其他3个方向的软件限位进行设置。
左边为XMin右边为XMax上面为YMax下面为YMax