SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第444页
1 - 16 S tudent Guide SIPLACE HF/HF3 10 SITEST Ausgabe 09/2005 16 10.2.3.2 T win Head Abb. 10.2 - 5 Ablauf der T win Head Kalibrierung Ablauf der K alibri erung desTwin Heads Maschinennull punkt K alib riert eilpo sitio …
1 - 15
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
15
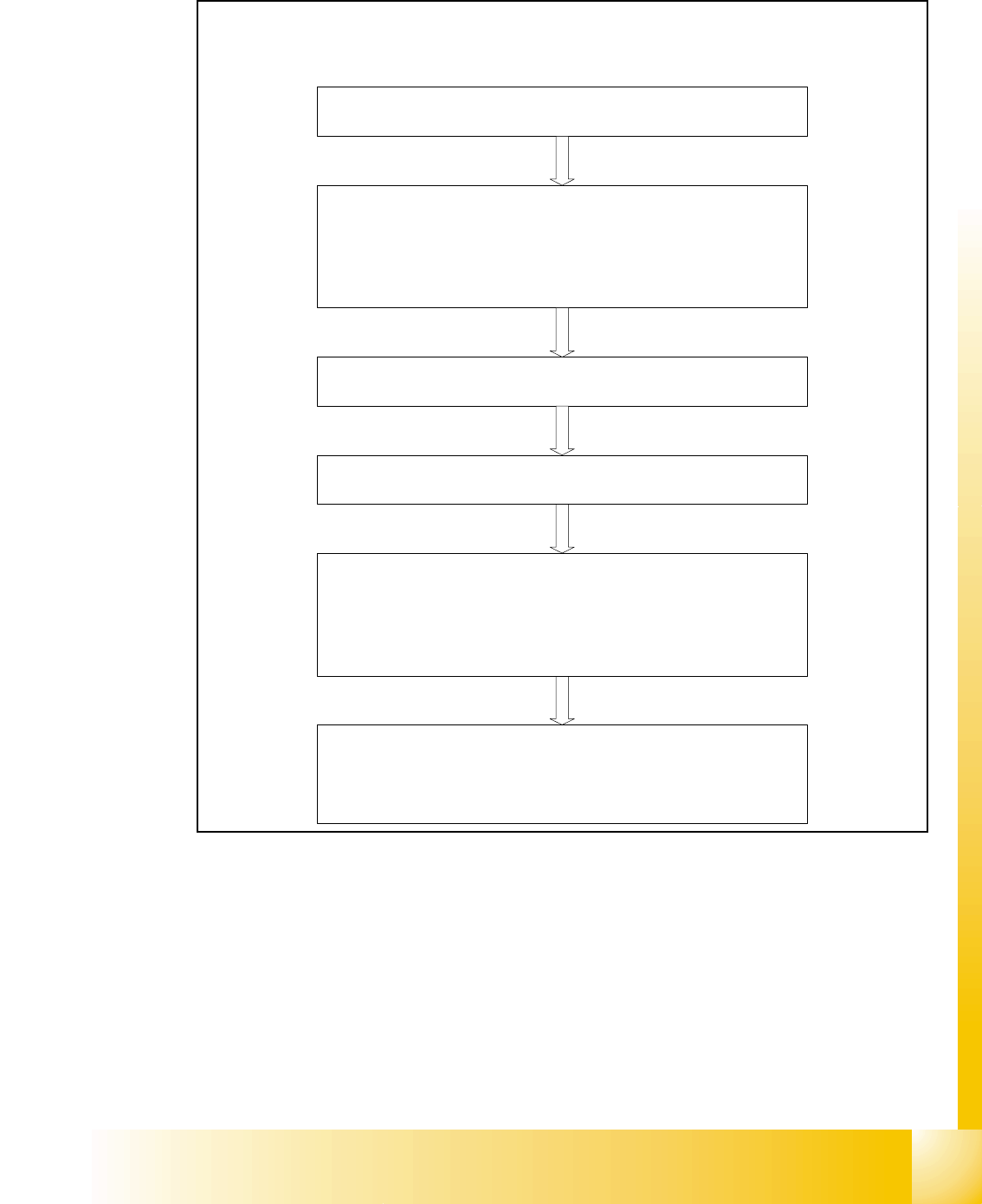
10.2.3.1 C&P Kopf
Abb. 10.2 - 4 Ablauf der C&P Kopf Kalibrierung
Ablauf der Kalibrierung des C&P Kopfes
Maschinennullpunkt
Kalibrierteilposition
LP-Kamera
y
Kamera-Koeffizient (Abbildungsmaßstab in nm/pixel)
y
Kalibrierung des LP-Kamera-Mittelpunktes
y
Kalibrierung der Verdrehung der LP-Kamera zum
Maschinen-Koordinatensystem
Verfahrweg X-/Y-Achse
y
Kalibrierung der min/max Verfahrwege der Portale
C&P Kopf
y
Kamera-Koeffizient (Einheit -nm/pixel), Winkel
y
Kopf-Offset (Offset LP-Kamera zu BE-Kamera)
y
Segmentoffset II (unten)
y
Segmentoffset I (oben)
C&P Kopf Pipettenwechsler
y
Kalibrierung der Abholpositionen für alle Magazine
y
Kalibrierung der Abholhöhe
y
Kalibrierung der Abwurfposition
1 - 16
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
16
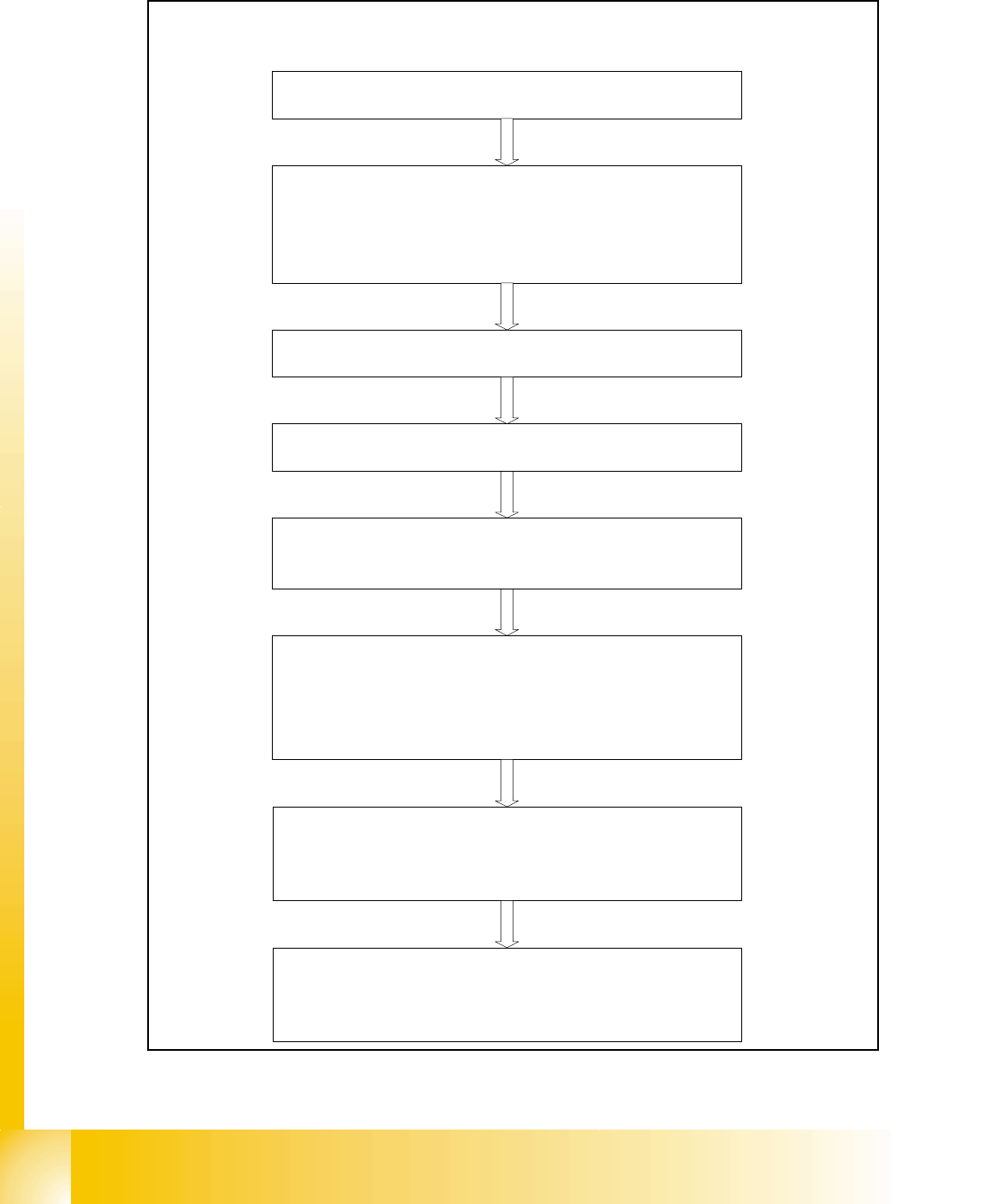
10.2.3.2 Twin Head
Abb. 10.2 - 5 Ablauf der Twin Head Kalibrierung
Ablauf der Kalibrierung desTwin Heads
Maschinennullpunkt
Kalibrierteilposition
LP-Kamera
y Kamera-Koeffizient (Abbildungsmaßstab in nm/pixel)
y Kalibrierung des LP-Kamera-Mittelpunktes
y Kalibrierung der Verdrehung der LP-Kamera zum
Maschinen-Koordinatensystem
Verfahrweg X-/Y-Achse
y Kalibrierung der min/max Verfahrwege der Portale
Twin head Höhe
y Kalibrierung der Höhe von Segment 1 und Segment 2
(Die Referenz ist die Oberkante des LP-Transports)
Twin Head IC-Kamera
y Fokusebene
y Kamera-Koeffizient (Einheit -nm/pixel), Winkel
y IC Kamera Position
Twin Head Pipettenwechsler
y Kalibrierung der Abholpositionen für alle Magazine
y Kalibrierung der Abholhöhe
y Kalibrierung der Abwurfposition
Twin Head
y Offset Segment 1 (LP-Kamera zu Segment 1)
y Offset Segment 2 (LP-Kamera zu Segment 2)
y IC Kamera Positionsmarke
1 - 17
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
17
Maschinennullpunkt 10
– Der Mittelpunkt des LP-Kamera wird für das Portal als Referenzpunkt benutzt. Alle Positionen
der X-/Y-Achse beziehen sich auf diesen Kameramittelpunkt.
– Als Referenzpunkt für den Maschinennullpunkt dient eine Bohrung neben der Kalibrierteil-Ablage.
– Sobald sich die LP-Kamera über dem Mittelpunkt dieser Bohrung befindet, wird die Portalpo-
sition exakt auf diese Werte gesetzt:
MA nullpunkt_x_PG1 631300 / MA nullpunkt_y_PG1 1298000. (PG bedeutet gantry group)
MA nullpunkt_x_PG2 1368700 / MA nullpunkt_y_PG2 702000
LP-Kamera: 10
– Die Pixelgröße des CCD-Sensors wird bestimmt (in µm)
Die Berechnung erfolgt unter Einbeziehung der Ax/Bx/Ay/By Kalibrierwerte. Die Daten werden
gesichert unter:
KAM_DAT.MA as:XU_Pixel / YU_Pixel
– Die Pixelgröße ist:
ca. 11600 nm bei der Standard-LP-Kamera SST 5,
ca. 9900 nm bei LP-Kamera Multicolor SST 18.
– Der Kameramittelpunkt wird bestimmt.
– Dieser Kameramittelpunkt ist nun der Referenzpunkt für alle Offsets und Portalpositionen!!
– Der Verdrehwinkel des CCD-Sensors in der LP-Kamera gegenüber dem Maschinenkoordina-
tensystem. Der Wert wird als
Kamera_winkel im Datenblock der LP-Kamera in KAMDAT.MA
gesichert.
Kalibrierteilposition (optional): 10
– Kalibrierung der X- und Y-Abholposition des Kalibrierteils.
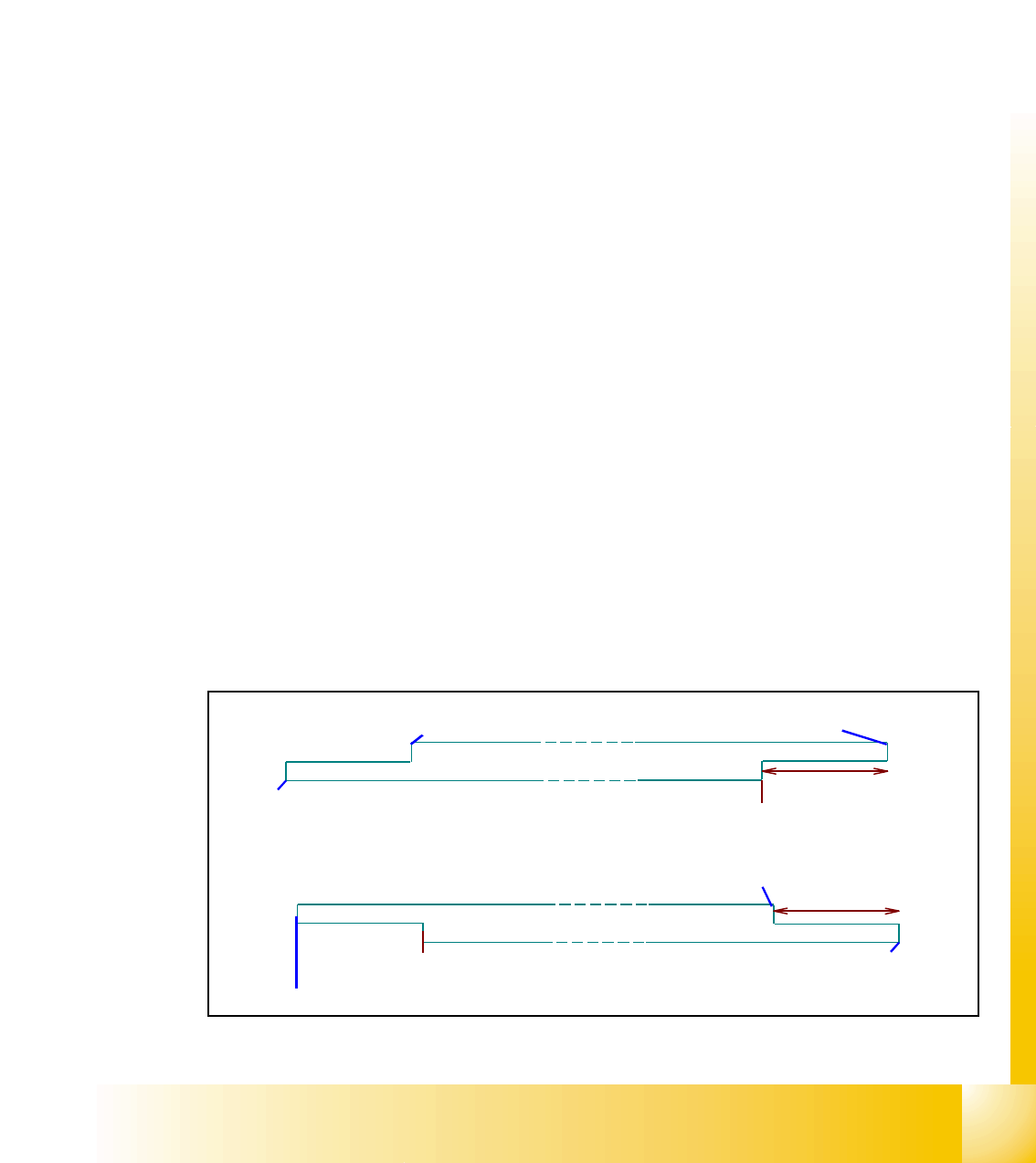
Verfahrweg (optional): 10
– Das Portal verfährt zum Nullimpuls zur Kalibrierung des Verfahrweges, anschliessend zum
HW-Endschalter. Dort wird der Positionstand des Portals aufgenommen.
– Der Software-Endschalter (Y +/- 1.5 mm , X +/- 0,5 mm) wird berechnet.
65mm
We nde punk t für Re fe re nzla uf
Geschwindigkeitsüberwachung
HW-Endsc ha lter
Y-Ac hse
45mm
X-Ac hse
Geschwindigkeitsüberwachung
HW-Endsc ha lter
HW- Endsc ha lter
Geschwindigkeitsüberwachung
We nde punk t für Re fe re nzla uf
Geschwindigkeitsüberwachung
HW- Endsc ha lter