KE-3010_20V_操作手册(程序员,管理员用).pdf - 第330页
操作手册Ⅱ 3-5-4-3- 7 检查贴片前元件面高度 使用 H MS 测量贴片 前的贴片 位置元件 面高度,检查 有无异 物。 (1) 条件设置 从 [ 菜单 ] - [ 机器操作 ] - [ 检查 ] 选择 [ 检查贴片前元 件面高度 ] ,即显示以下 测量条件 设置画 面。 1) 输送方式 a) 摄像机跟踪贴 片位置 ● 自动输送 以一定间隔,用 摄像机依 次对贴片位置进 行拍摄。 仅按「自动输送 间隔」设 置的时间停止, 经过该…
操作手册Ⅱ
(3) 关于执行检查时的各项动作
1) 检查后归还元件
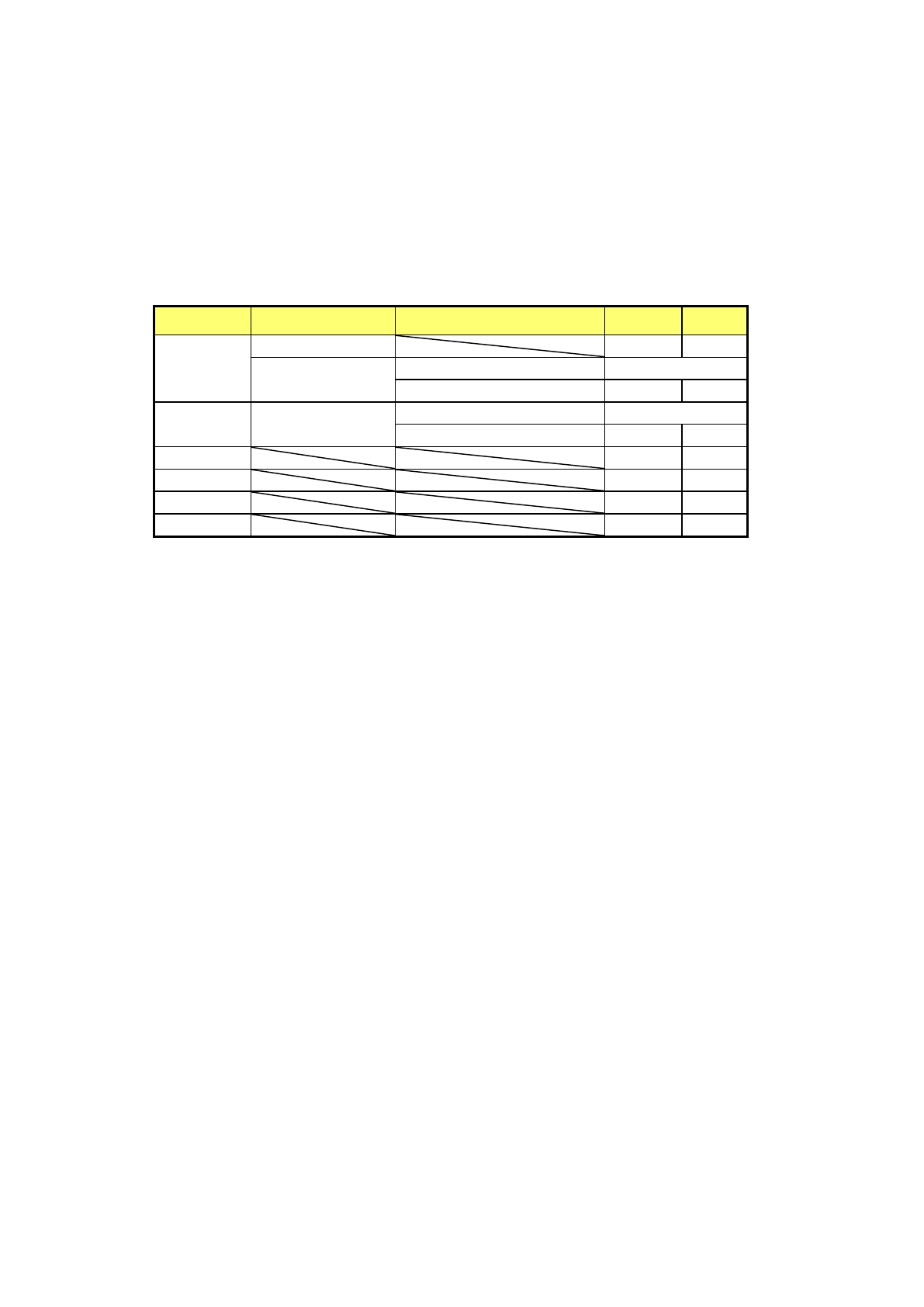
检查后的元件有两种处理:将元件归还原位置、或废弃。其处理方式,取决于包装方式,详
见下表。废弃位置,按元件数据中设置的[元件废弃]位置废弃。如果元件废弃方法设定为 [IC
回收带] [保护元件] 时,则按该设置处理。
将1mm 以下的元件设置为归还原来位置时,可能发生元件站立、元件倒翻,其处理方法请
从对话框的询问中选择。
包装方式
条件1
条件
2
归还
废弃
带式
32mm
纸粘着供料器
- ○
32mm
纸粘着供料器
以外
外形尺寸短边
1mm
以下
询问
*1
外形尺寸短边
1mm
以上
○ ○
*2
散装
外形尺寸短边
1mm
以下
询问
*1
外形尺寸短边
1mm
以上
○ ○
*2
托架
○ ○
*2
MTC
○ ○
*2
MTS
○ ○
*2
管状
- ○
*1 显示信息,选择是将元件归还、还是废弃。
*2 废弃方法设定为“IC 回收带”“保护元件”时,将按设定进行处理。
2) 选择吸取的供给装置
同一元件有多个供给装置(吸取数据)时,默认为从最先输入的数据开始吸取元件。也可根
据需要,变更供给装置。
3) 手动吸取
没有吸取数据时,可手动将元件装上吸嘴。但此种情况下,不能输入吸取坐标,也不能操作
供料器。
此外,采用手动吸取时,因元件尺寸的短边超过33.5mm的元件不能废弃,测量后必须把元
件移动到元件保护位置上。
3-5-4-3-4 负荷检查(选项)
检查贴片动作时的负荷。详情请参见「操作说明书 13-13 章 负荷检查」。
3-5-4-3-5 验证单独检查(选项)
将指定的元件安装到 Head 上,与程序(元件数据)中设置的电阻值、容量、极性的信息比较、检查。
请详见「操作说明书 2-12-4 章 验证检查(选项)」。
3-5-4-3-6 验证连续检查(选项)
将与指定的条件一致的元件安装到 Head 上与程序(元件数据)中设置的电阻值、容量、极性的信息
比较、检查。请详见「操作说明书 2-12-4 章 验证检查(选项)」。
3-244
操作手册Ⅱ
3-5-4-3-7 检查贴片前元件面高度
使用 HMS 测量贴片前的贴片位置元件面高度,检查有无异物。
(1) 条件设置
从[菜单]-[机器操作]-[检查]选择[检查贴片前元件面高度],即显示以下测量条件设置画面。
1) 输送方式
a) 摄像机跟踪贴片位置
● 自动输送
以一定间隔,用摄像机依次对贴片位置进行拍摄。
仅按「自动输送间隔」设置的时间停止,经过该时间后即移动到下一点。
<自动输送间隔>
使用滑动条调整停止时间。可设置最小 10msec 至最大 5 秒。
● 手动输送
保持停止状态,直至用户操作才向下一点移动。
2) 跟踪范围
输入从电路号第几号到第几号,以及从贴片数据的第几点到第几点,作为跟踪范围。默认执
行所有贴片点。
跟踪条件的设置的准备全部完成后,按<开始>开关或[执行]按钮。
按[关闭]按钮则返回原来的画面。
3-245

操作手册Ⅱ
(2) 执行 BOC 标记校准
执行后,如果有已设置 BOC 标记的生产程序,即执行 BOC 校准。
(识别所有电路的 BOC)
(3) 执行贴片基板面高度测量
执行后,贴片基板面高度测量中,会显示以下画面。
1) 状态
a) 跟踪模式
显示传送方法中设置的「手动」或「自动」。
b) 电路范围
显示执行高度测量的电路范围。
c) 贴片点范围
显示执行高度测量的贴片点范围。
d) 跟踪状态
「动作中」表示轴正在移动中。「停止」表示正在自动传送的暂停中。「停止」表示手动传送
或人为的停止状态。
「轴等待中」表示正在将轴移动到安全位置。「标记识别中」表示正在识别 IC 标记。
e) 停止的剩余时间
进度条显示的是自动传送中的暂停剩余时间。
2) 贴片位置
a) 电路编号
测量中的电路/电路总数
b) 贴片角度
测量中的元件贴片角度
c) 步骤数
测量中的贴片数据编号
d) 贴片 ID
测量中的贴片 ID
e) 元件名
测量中的元件名
3) 设置贴片坐标
显示贴片前测量元件面高度的贴片点的贴片坐标。
4) 照明设置
选择显示贴片点时使用的 OCC 照明。
5) 全体跟踪位置
随着测量进度,位置依次逐个推进。
停止中,可向前、向后推进自由移动此滑动条。
3-246