ServiceManual_UR10_zh_3.2.6.pdf - 第101页
保留所有 权 利 101 Servicemanual_UR1 0_en_3.2.6 3. 现在,您进入 Expert Mode (专家模式) ,请按下 Low Level Cont rol (低级控 制)。 4. 按 Turn power on (接通 电源),进入引导 加载器 5. 选择 Firmware (固件) 选项卡,标 记所有关节, 然后按 UPDA TE Firmware ( 更新固件)。 6. 处理固件更新,等待 robo…
保留所有权利 100 Servicemanual_UR10_en_3.2.6
4.2 更新关节固件
机器人上的每个关节都包含控制关节的固件。
注意:
在更新固件之前,请阅读整个章节。
在固件更新过程中,不得关闭控制器电源。
优傲机器人对因操作不当而导致的任何更新失败不承担任何责任。
软件版本 3.1.16828 及更新版本:
在机器人上更新软件时,固件将
自动更新。
更换机器人关节后,将
自动更新固件。
3.1.16828
之前的软件版本:
固件更新说明:
在更新固件之前,必须更新机器人软件。
请参考章节 4.1 更新软件。 更新机器人软件时,固件将自动复制到控制器上的文件夹中。
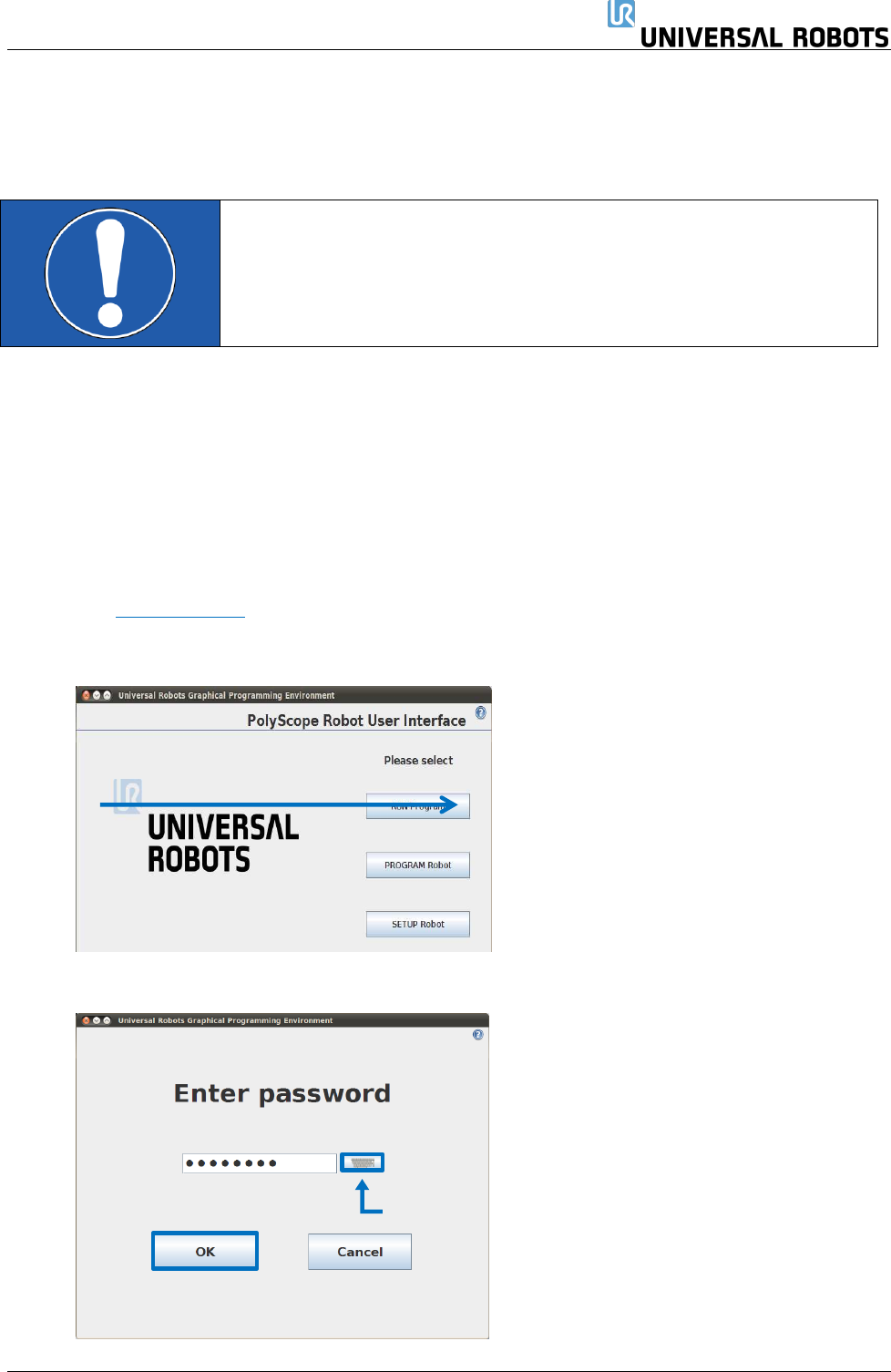
1. 从左向右滑动,穿过 PolyScope 主屏幕上的
优傲机器人
标志。
2. 输入密码 lightbot,并按下 OK
(确定)。
lightbot
保留所有权利 101 Servicemanual_UR10_en_3.2.6
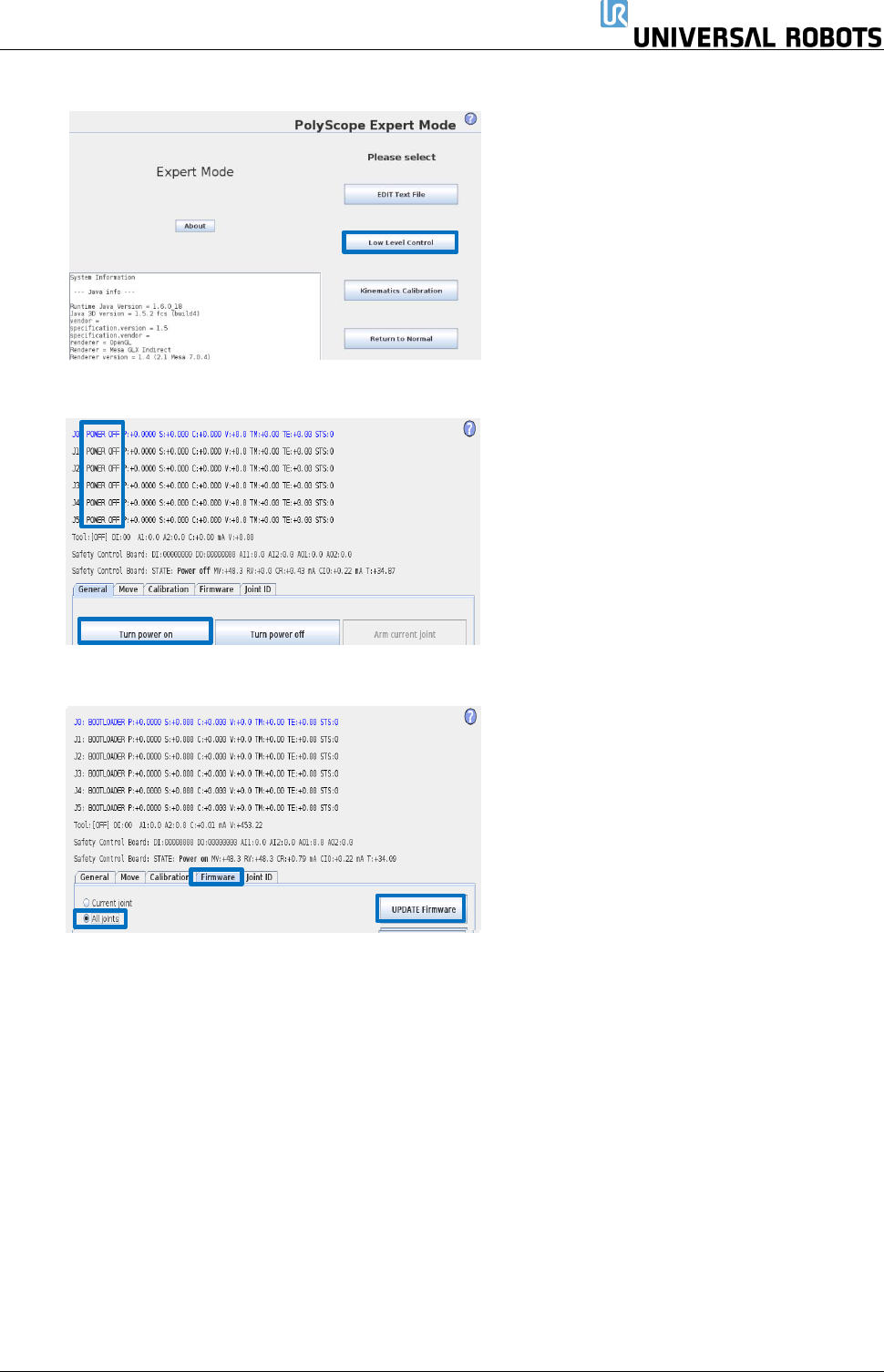
3. 现在,您进入Expert Mode
(专家模式),请按下
Low Level Control
(低级控制)。
4. 按 Turn power on
(接通
电源),进入引导加载器
5. 选择 Firmware(固件)选项卡,标记所有关节,然后按 UPDATE Firmware(更新固件)。
6. 处理固件更新,等待 robot firmware updated successfully
(机器人固件更新成功)
的消息。
在此更新过程中,不得关闭控制器电源。
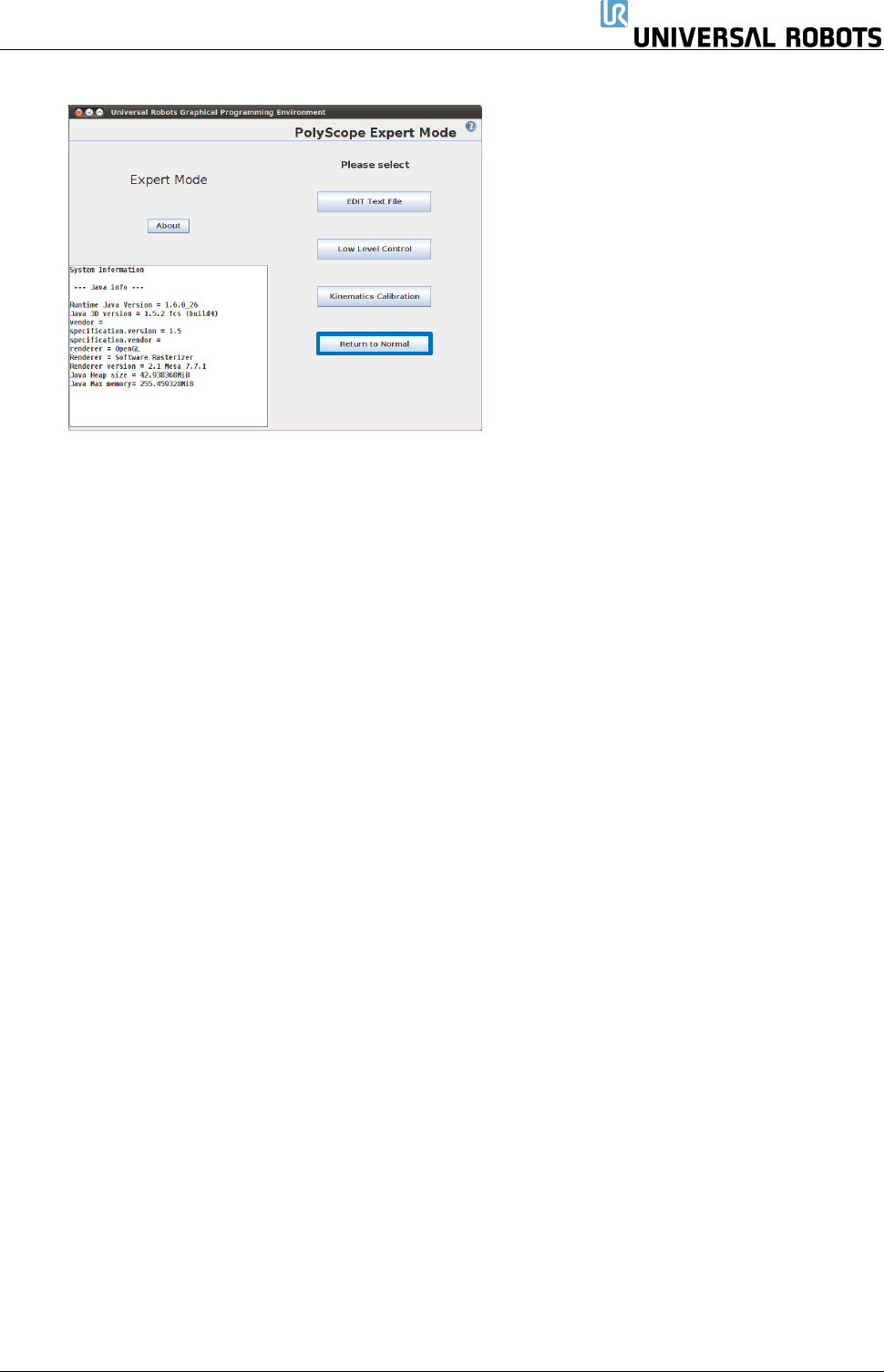
7. 成功更新后,请按 Back
(返回)
。
保留所有权利 102 Servicemanual_UR10_en_3.2.6
8. 返回专家模式,按 Return to Normal
(恢复正常)
。
固件现已更新。