ServiceManual_UR10_zh_3.2.6.pdf - 第96页
保留所有 权 利 96 Servicemanual_UR1 0_en_3.2.6 6. 连接电源,并验证示教 器功能是否 正常。 3.2.8 更换分电盘 警告: 在更换控制箱内部的任 何组件之前 ,必须完全关 闭控制箱, 这至关 重要。 遵循 5.3.7 完成 重启顺序 一节中的前 3 个步骤。 在完成以下更换 时,请遵循 章节 3.0 处理易受静电 损坏零件 更换控制箱中的分电盘 : 注意:使用相同 的程序关闭电源并 拆除铝盖板 和示…
保留所有权利 95 Servicemanual_UR10_en_3.2.6
13. 按照与所有电线相反的顺序,重新安装控制器模块,且 4 个螺栓上紧至 2.25 Nm。
14. 小心地放回铝盖板,确保安装正确,并用螺钉固定到位。
15. 连接电源,并验证示教器工作正常。
3.2.7 更换 12V 电源
警告:
在更换控制箱内部的任何组件之前,必须完全关闭控制箱,这至关
重要。
遵循
5.3.7 完成重启顺序一节中的前 3 个步骤。
完成以下更换时,请遵循中列出的指导原则
章节
3.0 处理易受静电损坏零件
更换控制箱中的 12V 电源
注意:使用相同的程序关闭电源并拆除铝盖板
和示教器的电缆,
如 3.2.5 更换示
教器所述。
若要更换 12V 电源,请按照
3.2.6 更换 48V 电源中的步骤操作
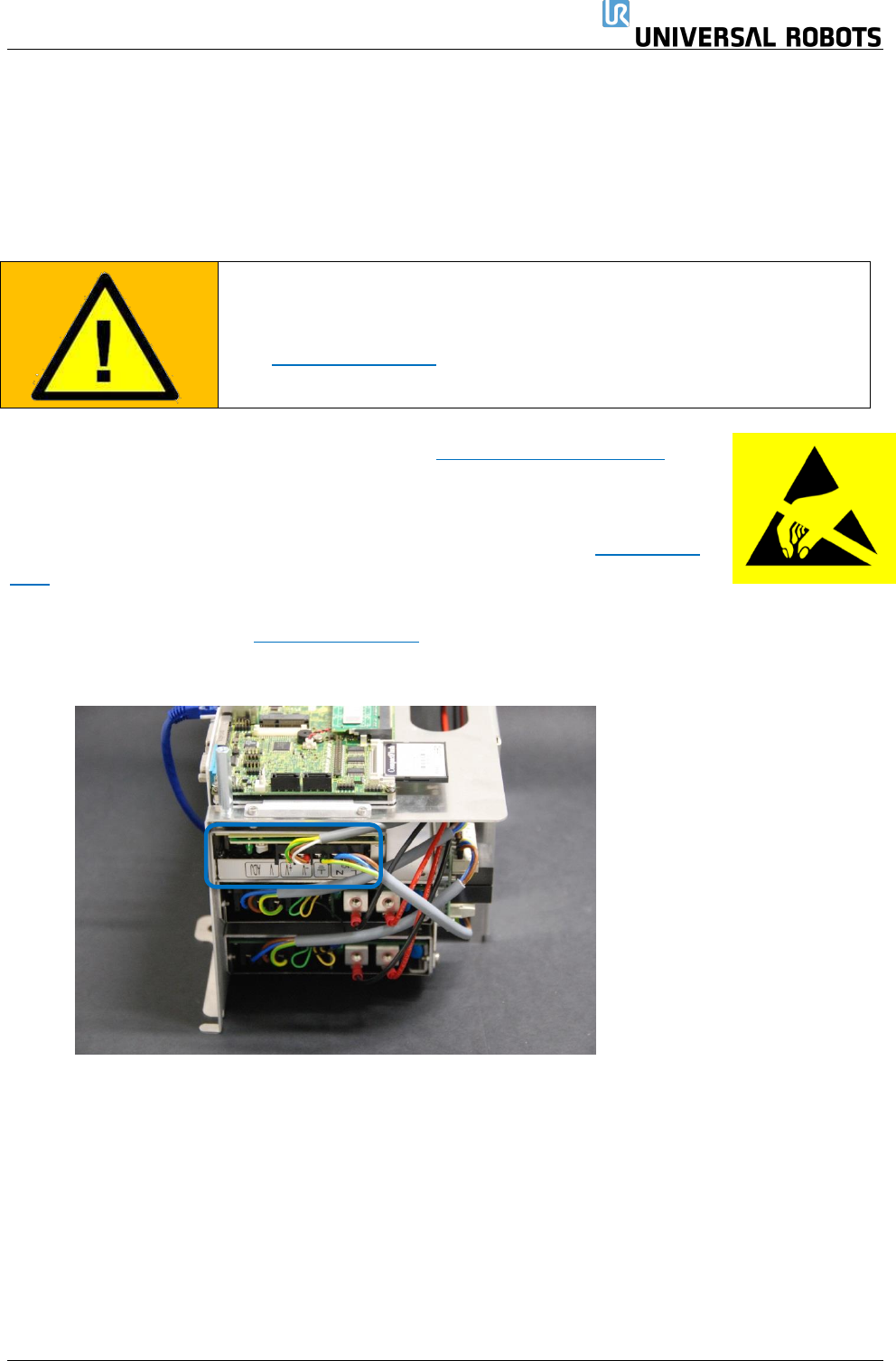
1. 12V 电源放在机架顶部。将其固定在框架中的螺钉位于侧面。
2. 将 12V 电源更换为新的。
3. 重新连接 12V 电源的电线。
4. 按照相反的顺序,重新安装控制器模块,并连接风扇的 2 根导线和示教器的电缆。
5. 仔细地放回铝盖板,确保安装正确,并用 5 个螺钉将其固定到位。
保留所有权利 96 Servicemanual_UR10_en_3.2.6
6. 连接电源,并验证示教器功能是否正常。
3.2.8
更换分电盘
警告:
在更换控制箱内部的任何组件之前,必须完全关闭控制箱,这至关
重要。
遵循
5.3.7 完成重启顺序一节中的前 3 个步骤。
在完成以下更换时,请遵循
章节
3.0 处理易受静电损坏零件
更换控制箱中的分电盘:
注意:使用相同的程序关闭电源并拆除铝盖板
和示教器的电缆,
请参见 3.2.5 更
换示教器若要更换分电盘,请按照 3.2.6 更换 48V 电源中的步骤操作
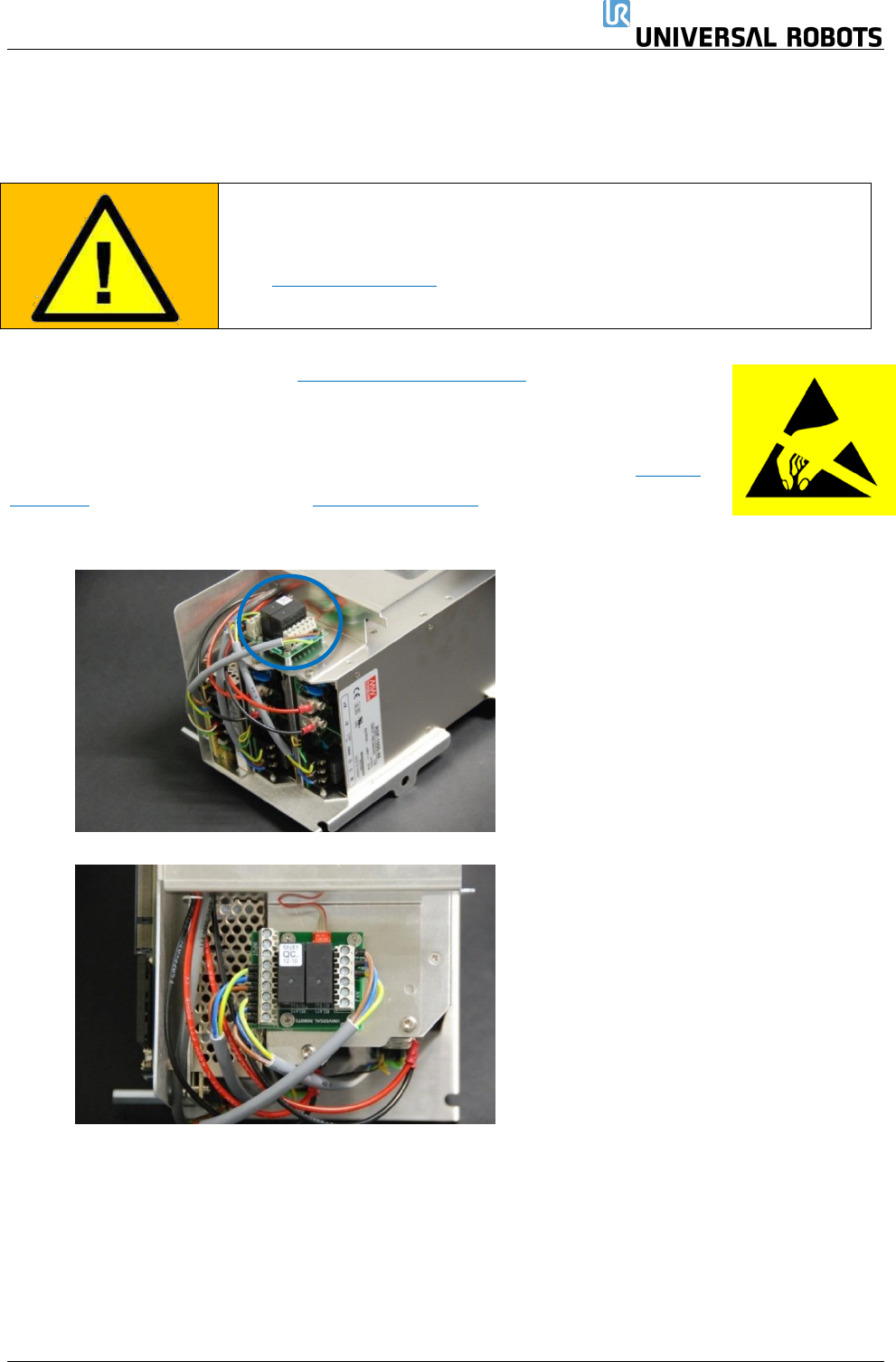
1. 分电盘放置在机架顶部。
2. 拆卸分电盘之前,标记电缆,并将其从电路板上断开。
3. 更换上新的分电盘。
4. 重新连接分电盘的电线。
5. 按照相反的顺序,重新安装控制器模块,并连接风扇的 2 根导线和示教器的电缆。
6. 仔细地放回铝盖板,确保安装正确,并用 5 个螺钉将其固定到位。
保留所有权利 97 Servicemanual_UR10_en_3.2.6
7. 连接电源,并验证示教器功能是否正常。
4.
软件
4.1
更新软件
优傲机器人软件称为 PolyScope。
注意:
在更新软件之前,请先阅读整个章节。
在软件更新过程中,不得关闭控制箱电源。
优傲机器人对因操作不当而导致的任何更新失败不承担任何责任。
更新软件可能导致某些功能发生变化。请务必查看优傲机器人支持网站上的发行说明
(
www.universal-robots.com/support/)
1. 请勿将软件版本降级至低于机器人生产时自带的版本。
2. 如果您可以受益于新功能或已修复的问题,我们建议进行更新。
3. 在执行更新之前,建议您仔细阅读发行说明,以避免因功能更改或增加而导致的意外行为。
4. 如果您对实际或计划的应用程序有疑虑,请联系您的供应商以获取建议和帮助。
软件更新说明:
1. 下载软件更新。更新时,必须按步骤进行,即从 3.3 到3.4,再到 3.5。
2. 将其保存在 USB 存储器的根文件夹中。
3. 将 U 盘插入示教器右侧的 USB 连接器。
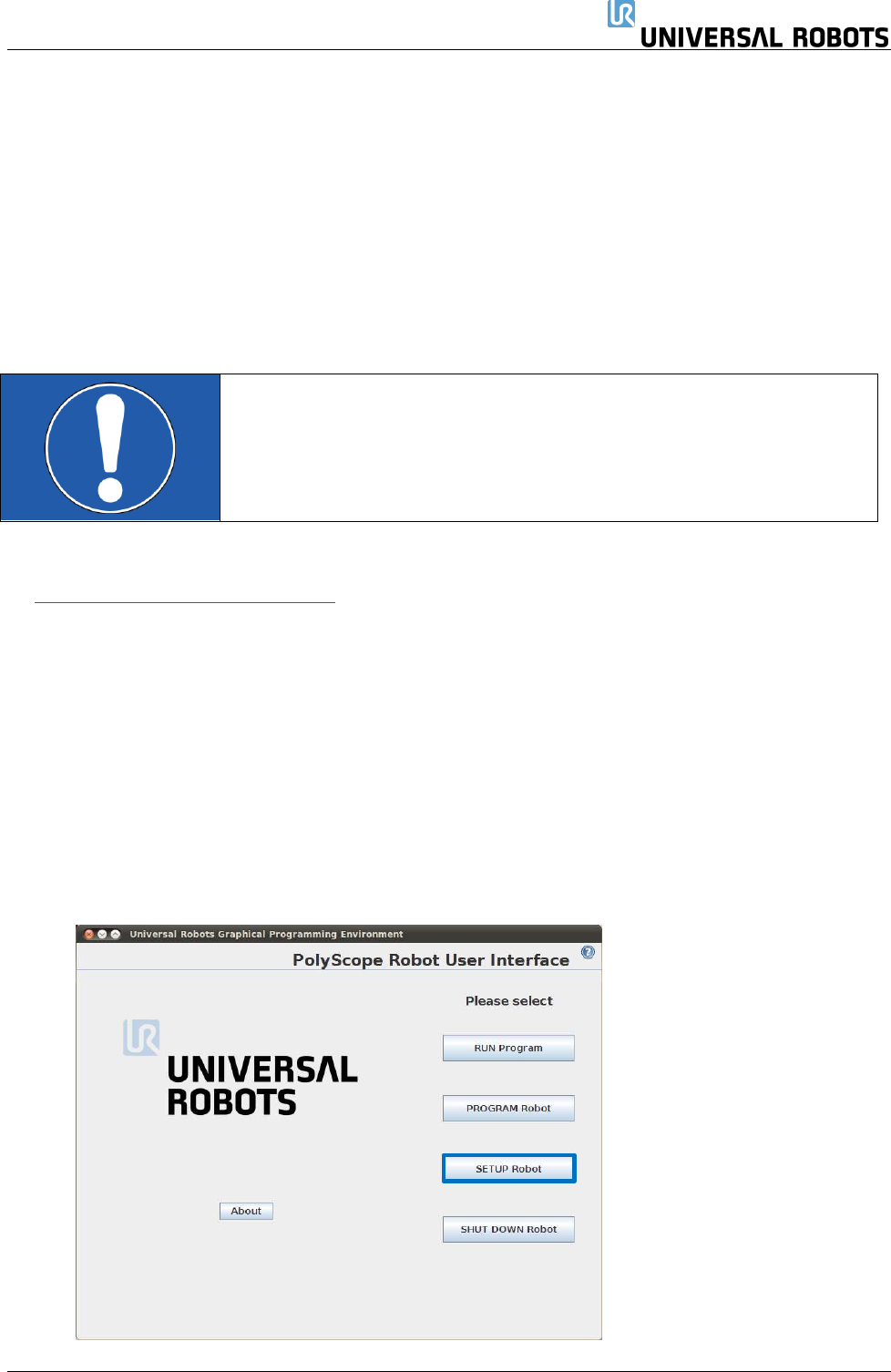
4. 转到 PolyScope 的主屏幕。