ServiceManual_UR10_zh_3.2.6.pdf - 第24页
保留所有 权 利 24 Servicemanual_UR1 0_en_3.2.6 7. 断开电线 8. 拆下定位螺钉(较新的 关节外壳上 没有)。 9. 使用小平头螺丝刀或 类似工具, 轻轻取下黑色 柔性扁型环 ,并将其从关 节外壳上原来的位 置 向后拉动。 10. 将灰色的特氟隆环向后 滑动。 10 个螺钉 可见,关节两侧各 5 个。 使用开口扳手松开螺钉 ,每个大约 两整圈。 11. 将两个零件拉开,逆时 针轻轻扭转 约 5 度,直…
保留所有权利 23 Servicemanual_UR10_en_3.2.6
3.1.4 将关节与配对关节分离的一般指引
拆卸:
1. 开始维修前,请准备好必要的工具和文档。
1.1. 带扭矩工具、防静电腕带等的维修套件。
1.2. 彻底阅读并理解本指南。
2. 将机器人移动到一个舒适的拆卸位置,或者,在必要时,将整个机械臂从工作单元上拆卸下来,
并放置在坚固的表面上。
3. 关闭控制器。
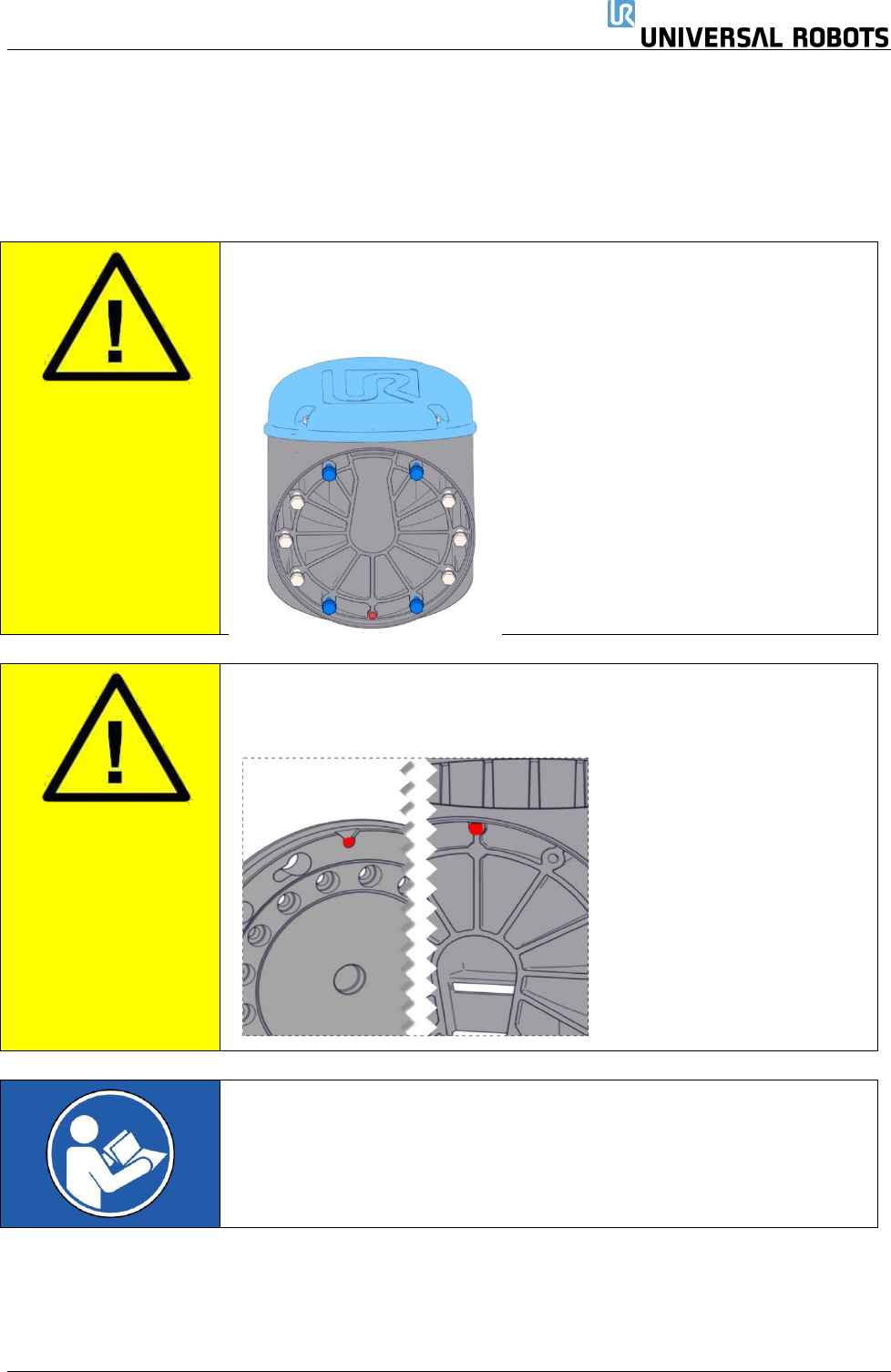
4. 拆下蓝色盖子。
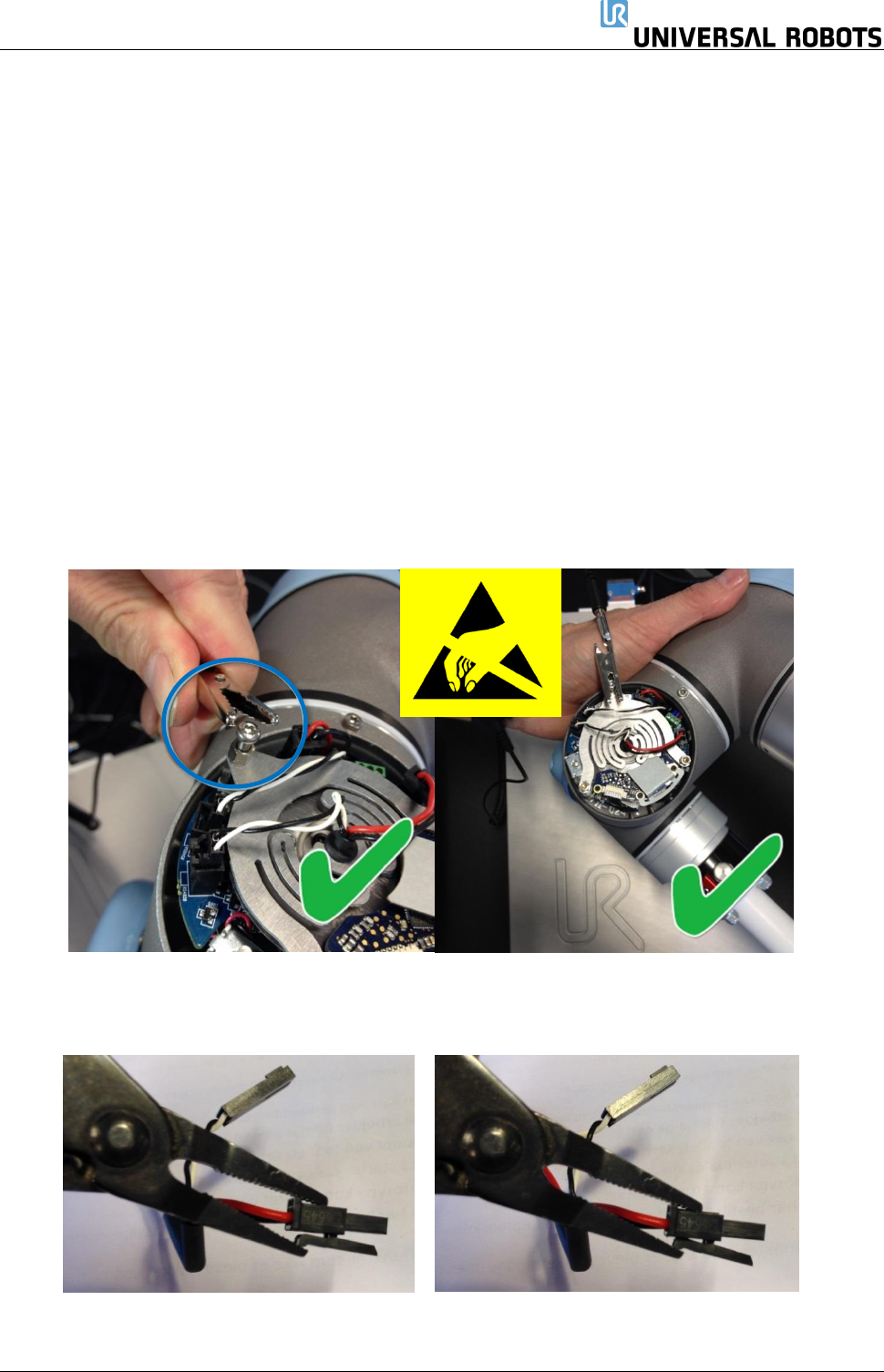
5. 重新固定蓝色盖子上的螺钉,并将防静电腕带上的鳄鱼夹连接到螺钉上,如下所示。
6. 轻轻地拔出电缆连接器,但不要弯曲印刷电路板。
有些连接器配有卡扣,必须在从印刷电路板拔出之前按下卡扣。下面的示例。
保留所有权利 24 Servicemanual_UR10_en_3.2.6
7. 断开电线
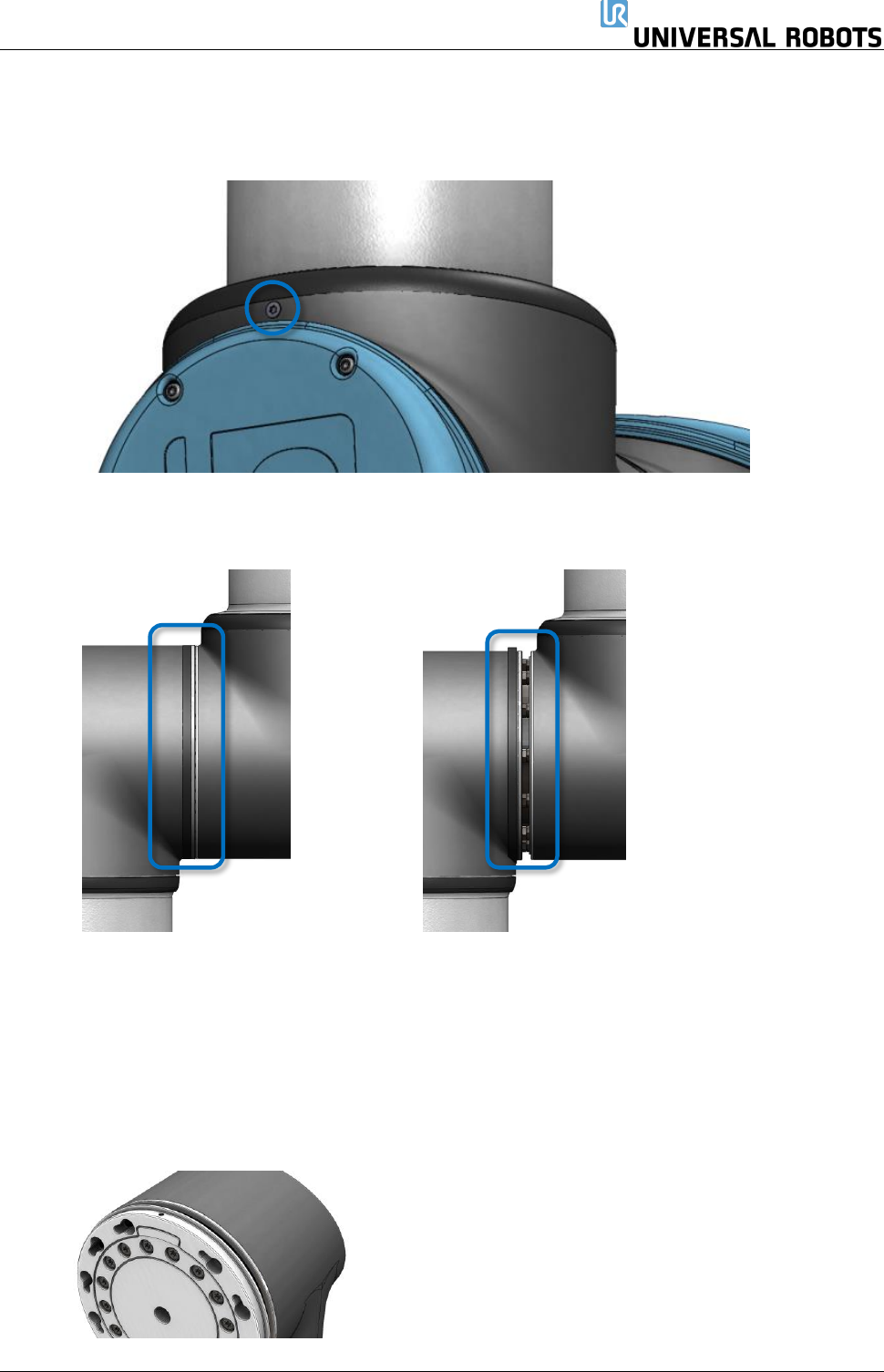
8. 拆下定位螺钉(较新的关节外壳上没有)。
9. 使用小平头螺丝刀或类似工具,轻轻取下黑色柔性扁型环,并将其从关节外壳上原来的位置
向后拉动。
10. 将灰色的特氟隆环向后滑动。
10 个螺钉可见,关节两侧各 5 个。
使用开口扳手松开螺钉,每个大约两整圈。
11. 将两个零件拉开,逆时针轻轻扭转约 5 度,直到达到机械止动(孔为钥匙孔型)。
之后,它们可以完全分离。