ServiceManual_UR10_zh_3.2.6.pdf - 第39页
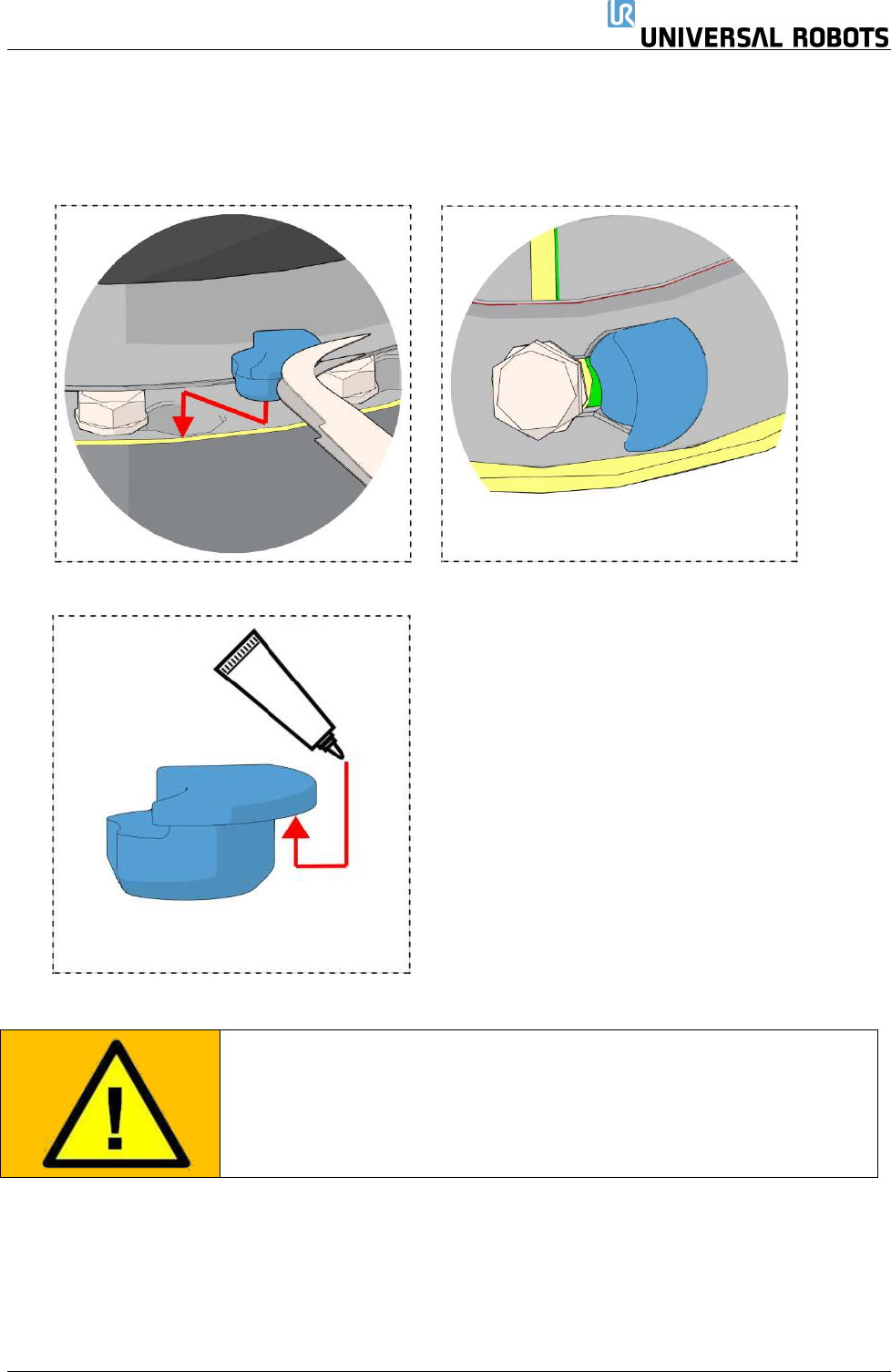
保留所有 权 利 39 Servicemanual_UR1 0_en_3.2.6 3. 如图所示,在 10 个锁 孔中各插入 一个插头。 平面应该朝上,平面上 的凹槽应该 朝向螺钉。应 该不可能插 入错误。对于 该目的,可 以使用镊 子。 * 机器人定位时,如果肘 部不能低于底座 关节,可 以使用少量硅脂 ,确保插 头保持在原位 警告: 如果插头无法安装到孔 中,关节可 能会错位。必 须纠正这种 情形。 请参见 3.1.4 将关节与配 …
保留所有权利 38 Servicemanual_UR10_en_3.2.6
添加插头和锁环只需 5 个简单的步骤。
定位机器人时,肘部低于底座关节。将将便于插入插头。
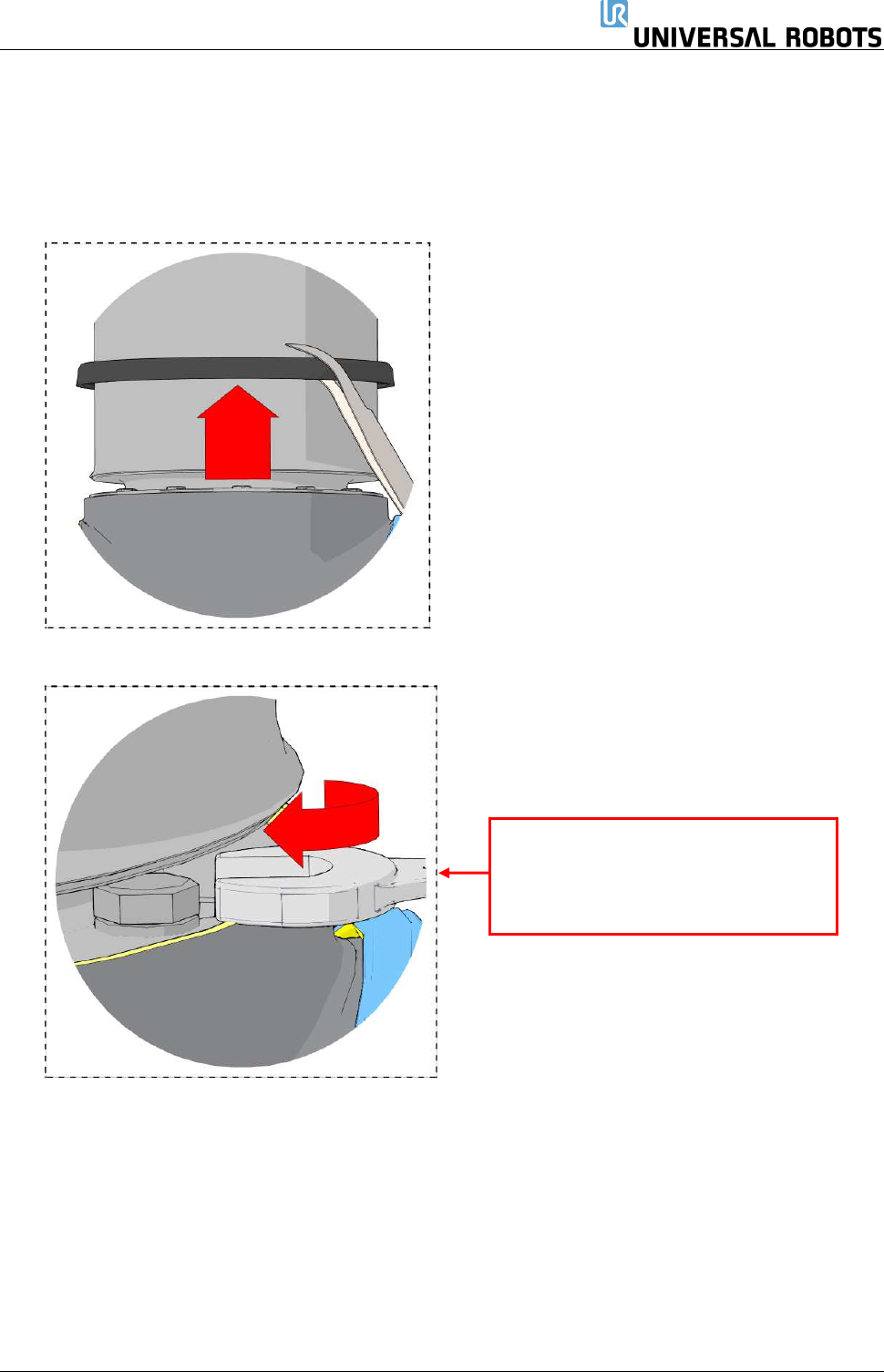
1. 拆下肘部关节与上臂之间的扁型环。
对于该目的,可以使用镊子。小心不要损坏扁型环。
2. 确保所有螺栓紧固至 2.6Nm
!2.6Nm !
保留所有权利 40 Servicemanual_UR10_en_3.2.6
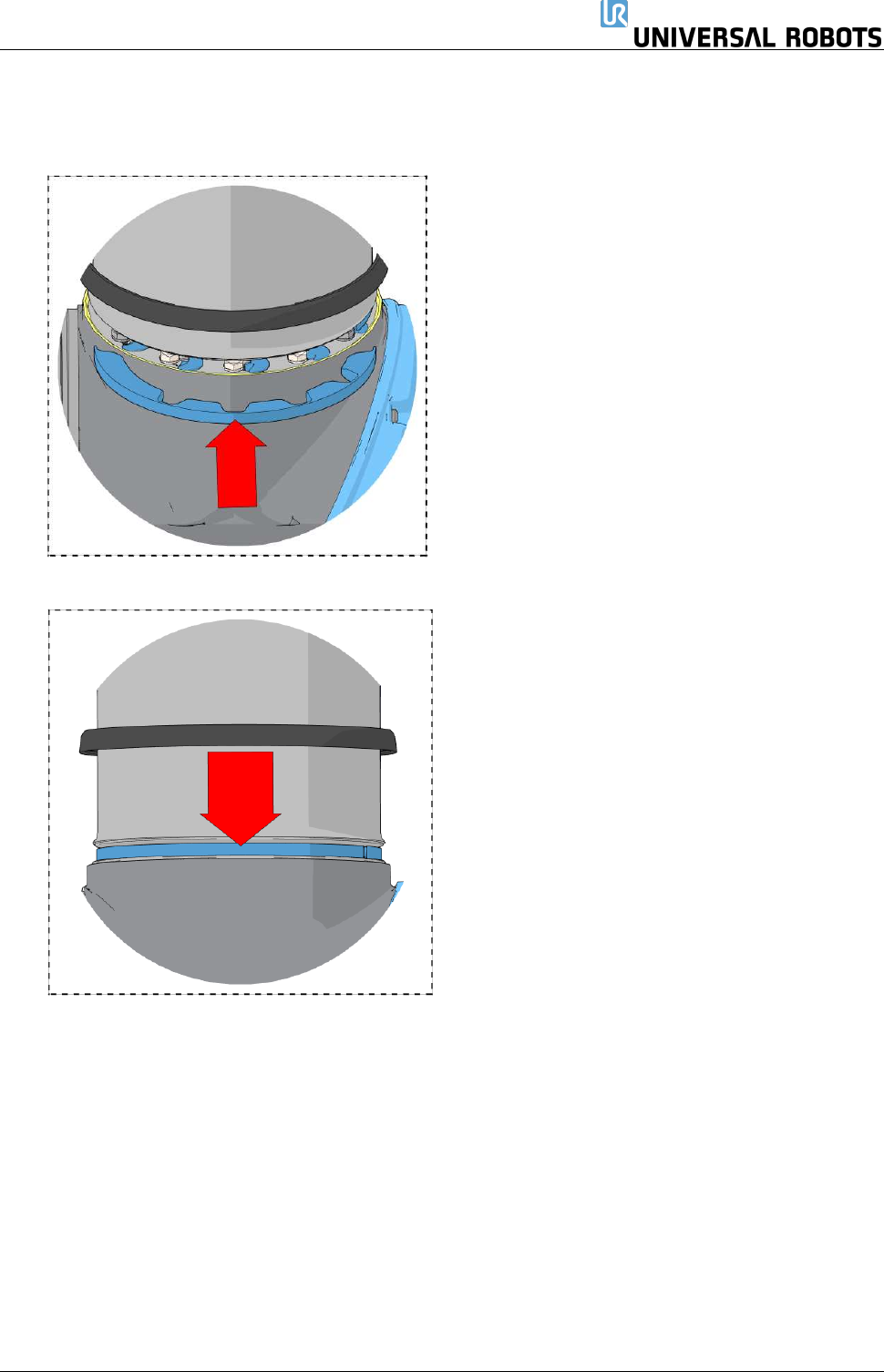
4. 在插头顶部增加 2 个锁环。锁环必须尽量深地压入。
注意,锁环上的宽凸起适合两个螺钉之间的宽槽。
应该不可能插入错误。
5. 将扁型环放入原来的位置。如果扁型环有损坏/松动的迹象,必须更换为套件中提供的扁型环。