ServiceManual_UR10_zh_3.2.6.pdf - 第43页
保留所有 权 利 43 Servicemanual_UR1 0_en_3.2.6 手腕 1 关节 – 下臂:组装 有关详情和照片,请参 见: 3.1.4 将关 节 与配 对 关 节 分离的一般指 引 1. 使用螺钉和垫圈,将手 腕 1 关 节轻轻插入下 臂。 2. 确保垫圈完全插入并与 螺栓头齐平 (这至关重要 ),然后, 沿相反方向轻 轻扭转零件,直到 达到 机械止动。 3. 轻微拧紧 10 个螺钉, 然后,交叉 上紧 至 1.3Nm…

保留所有权利 42 Servicemanual_UR10_en_3.2.6
3.1.11 手腕 1 关节 – 下臂
拆卸
有关详情和照片,请参见:3.1.4 将关节与配对关节分离的一般指引
关闭控制器。
1. 拆下手腕 1 关节上的蓝色盖子。
2. 连接防静电腕带
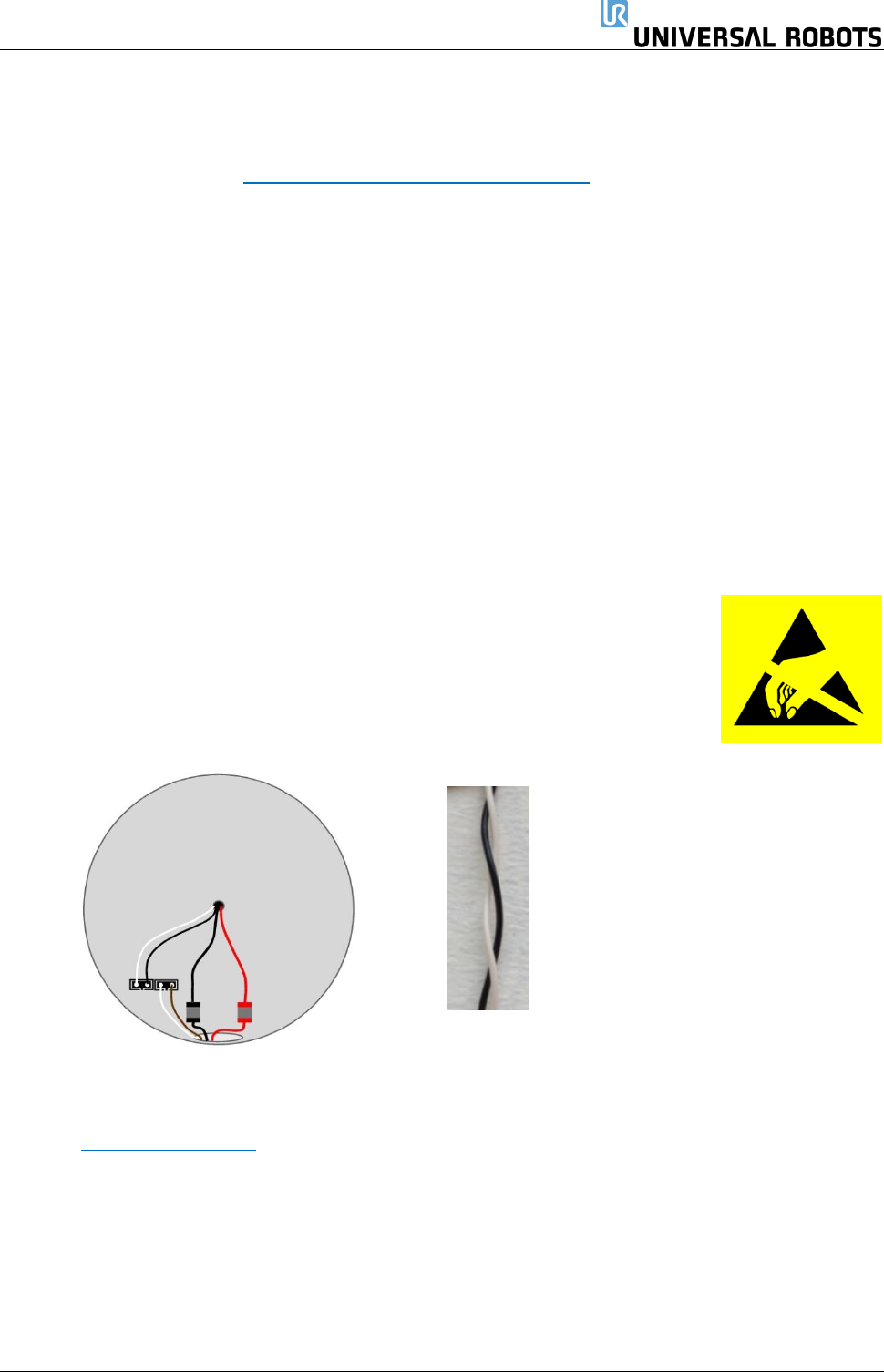
3. 断开下臂与手腕 1 关节之间的电线。
1 x 红色电线 = 48V DC
1 x 黑色电线 = 接地
黑色连接器 = 总线电缆(注意连接器方位)
4. 拆卸对准螺钉。
5. 使用小螺丝刀或类似工具,轻轻取下下臂与手腕 1 关节之间的黑色挠性垫片,并将其绕在下臂上。
6. 10 个螺钉可见,关节两侧各 5 个。使用 5.5mm 开口扳手,将螺钉大约松开两整圈,每个螺钉大
约 3 mm。
7. 将下臂与手腕 1 关节拉开,并沿相反方向轻轻扭转两个零件约 8 mm,直至到达机械止动位置
(孔为钥匙孔型)。
8. 将下臂从手腕 1 关节上拉开。
保留所有权利 43 Servicemanual_UR10_en_3.2.6
手腕 1 关节 – 下臂:组装
有关详情和照片,请参见:
3.1.4 将关节与配对关节分离的一般指引
1. 使用螺钉和垫圈,将手腕 1 关节轻轻插入下臂。
2. 确保垫圈完全插入并与螺栓头齐平(这至关重要),然后,沿相反方向轻轻扭转零件,直到达到
机械止动。
3. 轻微拧紧 10 个螺钉,然后,交叉上紧至 1.3Nm。
4. 轻轻地放回垫片。
5. 安装定位螺钉,并拧紧至 0.4Nm
。
6. 连接防静电腕带
7. 重新连接下臂与手腕 1 关节之间的电线。
8. 连接前,将通信电缆扭转1.5 至 2 个整圈。
(可降低系统中的电气噪声)
9. 在手腕 1 关节上安装蓝色盖子,并将 2 个 M3x6 和 1 个 M3x10 上紧至 0.4Nm
。
10. 继续
3.1.16 双机械臂校准 章节,对机器人进行校准。

保留所有权利 44 Servicemanual_UR10_en_3.2.6
3.1.12 手腕 2 关节 – 手腕 1 关节
拆卸
有关详情和照片,请参见:3.1.4 将关节与配对关节分离的一般指引
关闭控制器。
1. 拆下手腕 1 关节上的蓝色盖子。
2. 连接防静电腕带
3. 断开手腕 1 关节与手腕 2 关节之间的电线
1 x 红色电线 = 48V DC
1 x 黑色电线 = 接地
黑色连接器 = 总线电缆(注意连接器方位)
4. 拆卸对准螺钉。
5. 使用小螺丝刀或类似工具,轻轻取下手腕 1 与手腕 2 之间的黑色挠性扁型环,并将其绕在关节外
壳上。
6. 将灰色的特氟隆环向后滑动。10 个螺钉可见,关节两侧各 5 个。使用 5.5mm 开口扳手,将螺钉
大约松开两整圈,每个螺钉大约 3 mm。
7. 将手腕 1 关节与手腕 2 关节拉开,并沿相反方向轻轻扭转两个零件约 8 mm,直至到达机械止动
位置(孔为钥匙孔型)。
8. 从手腕 2 关节拉离手腕 1 关节。