ServiceManual_UR10_zh_3.2.6.pdf - 第22页
保留所有 权 利 22 Servicemanual_UR1 0_en_3.2.6 3.1.3 制动器释放 如果需要,可以在没有 连接电源的 情况下释放关 节上的制动 器。 小心: • 在释放制动器之前,应 拆卸任何危 险零件,以避 免任何危险 情 况,这至关重要。 • 如果释放底座关节、肩 部关节或肘 部关节上的制 动器,在松 开制 动器之前,应进行适当 的机械支撑 ,这至关重要 。 • 释放制动器时,务必确 保人员没有 危险。 • 仅…
保留所有权利 22 Servicemanual_UR10_en_3.2.6
3.1.3 制动器释放
如果需要,可以在没有连接电源的情况下释放关节上的制动器。
小心:
• 在释放制动器之前,应拆卸任何危险零件,以避免任何危险情
况,这至关重要。
• 如果释放底座关节、肩部关节或肘部关节上的制动器,在松开制
动器之前,应进行适当的机械支撑,这至关重要。
• 释放制动器时,务必确保人员没有危险。
• 仅在必要的范围内移动关节。
关节移动不得超过 160 度,以确保机器人可以找到其原始物理位
置。
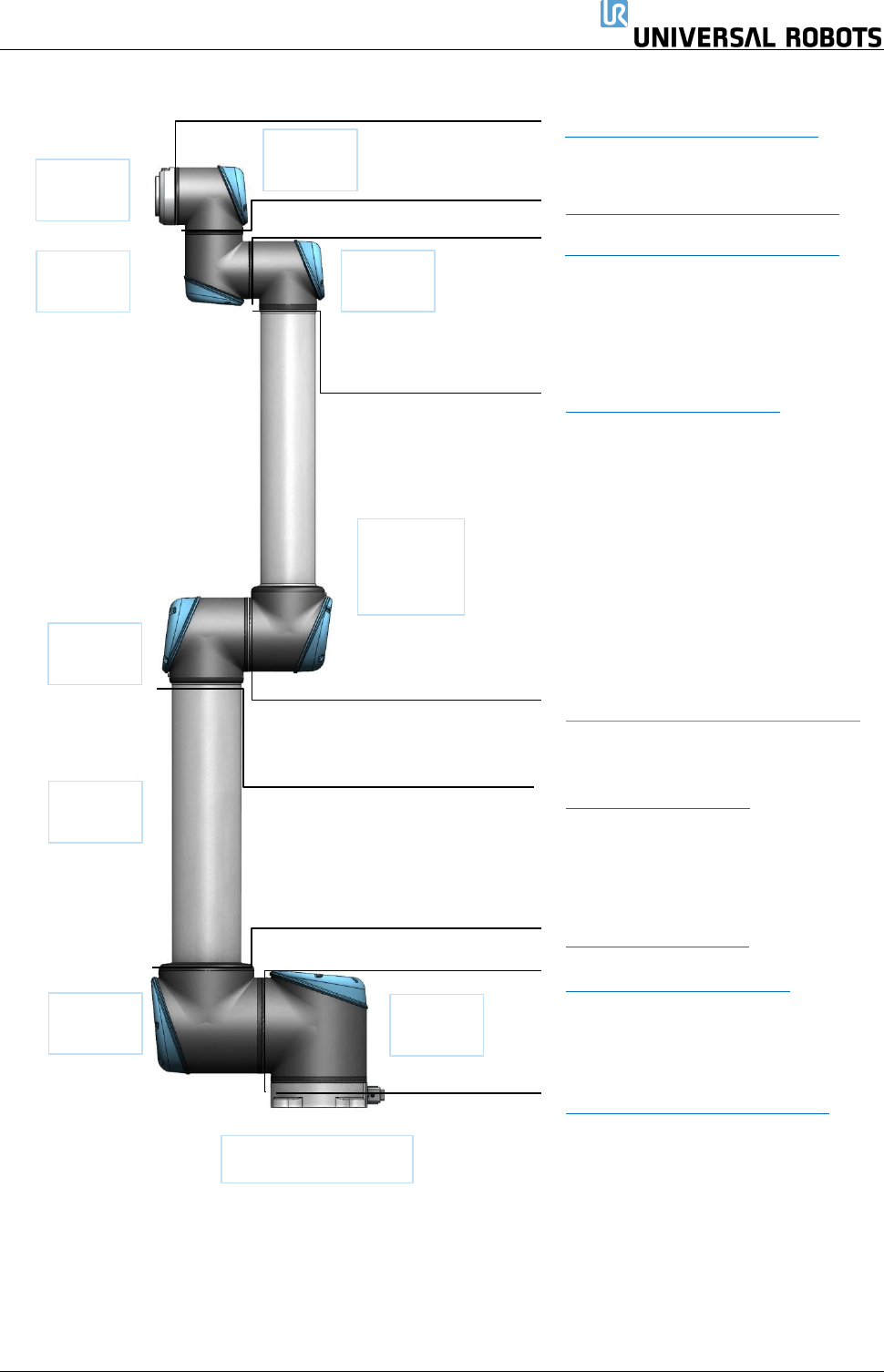
释放关节的程序
1. 关闭控制器。
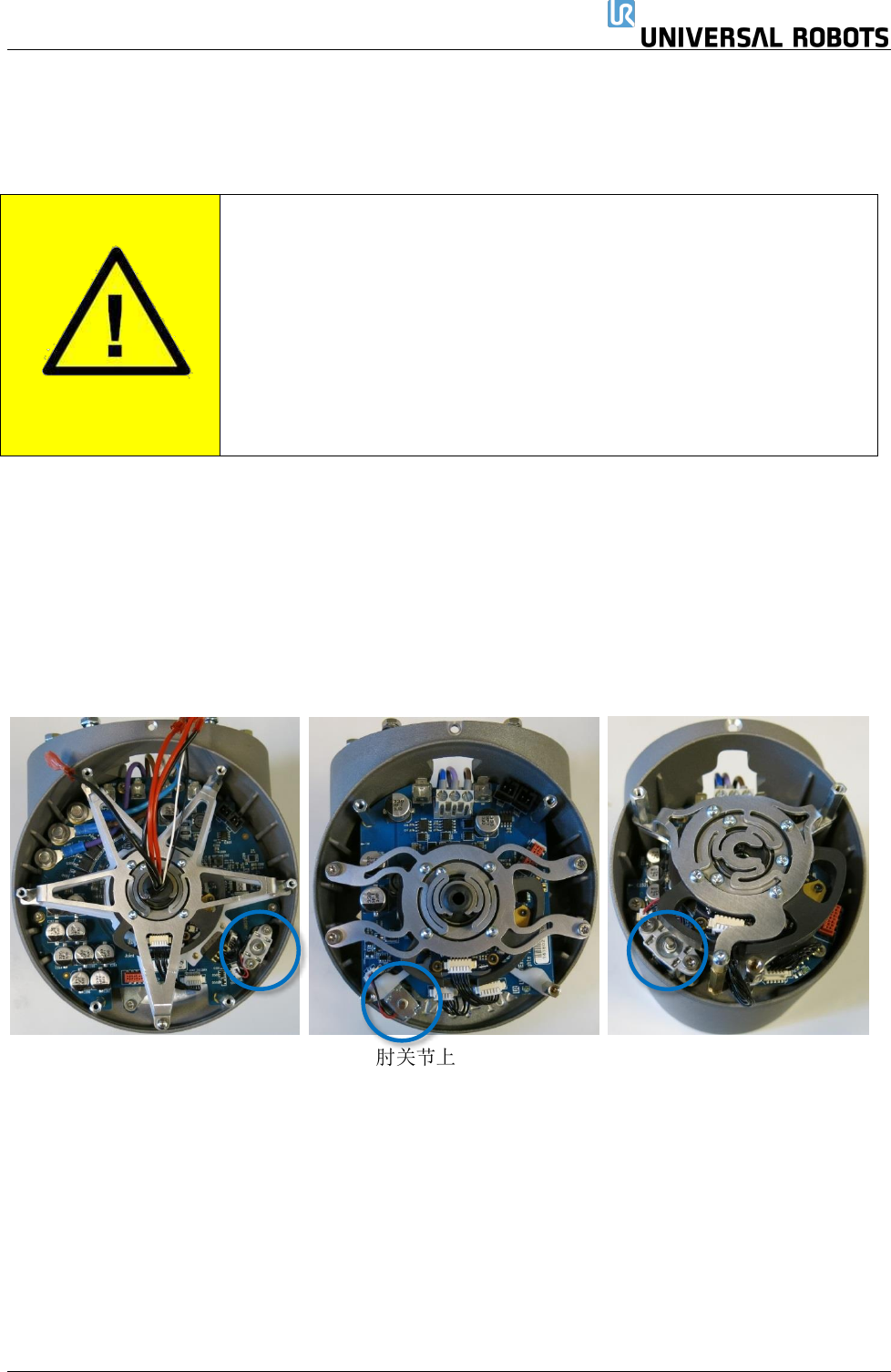
2. 拆下关节上的蓝色盖子。
3. 向下推动制动销释放,之后,可以转动关节。
底部和肩部关节上的制动器, 肘关节上的制动器, 手腕关节上的制动器
4. 确保将蓝色盖子正确地放回关节上,并拧紧螺钉,之后方可开启控制器。
5. 蓝色盖子上螺钉的正确扭矩值为 0.4Nm
保留所有权利 23 Servicemanual_UR10_en_3.2.6
3.1.4 将关节与配对关节分离的一般指引
拆卸:
1. 开始维修前,请准备好必要的工具和文档。
1.1. 带扭矩工具、防静电腕带等的维修套件。
1.2. 彻底阅读并理解本指南。
2. 将机器人移动到一个舒适的拆卸位置,或者,在必要时,将整个机械臂从工作单元上拆卸下来,
并放置在坚固的表面上。
3. 关闭控制器。
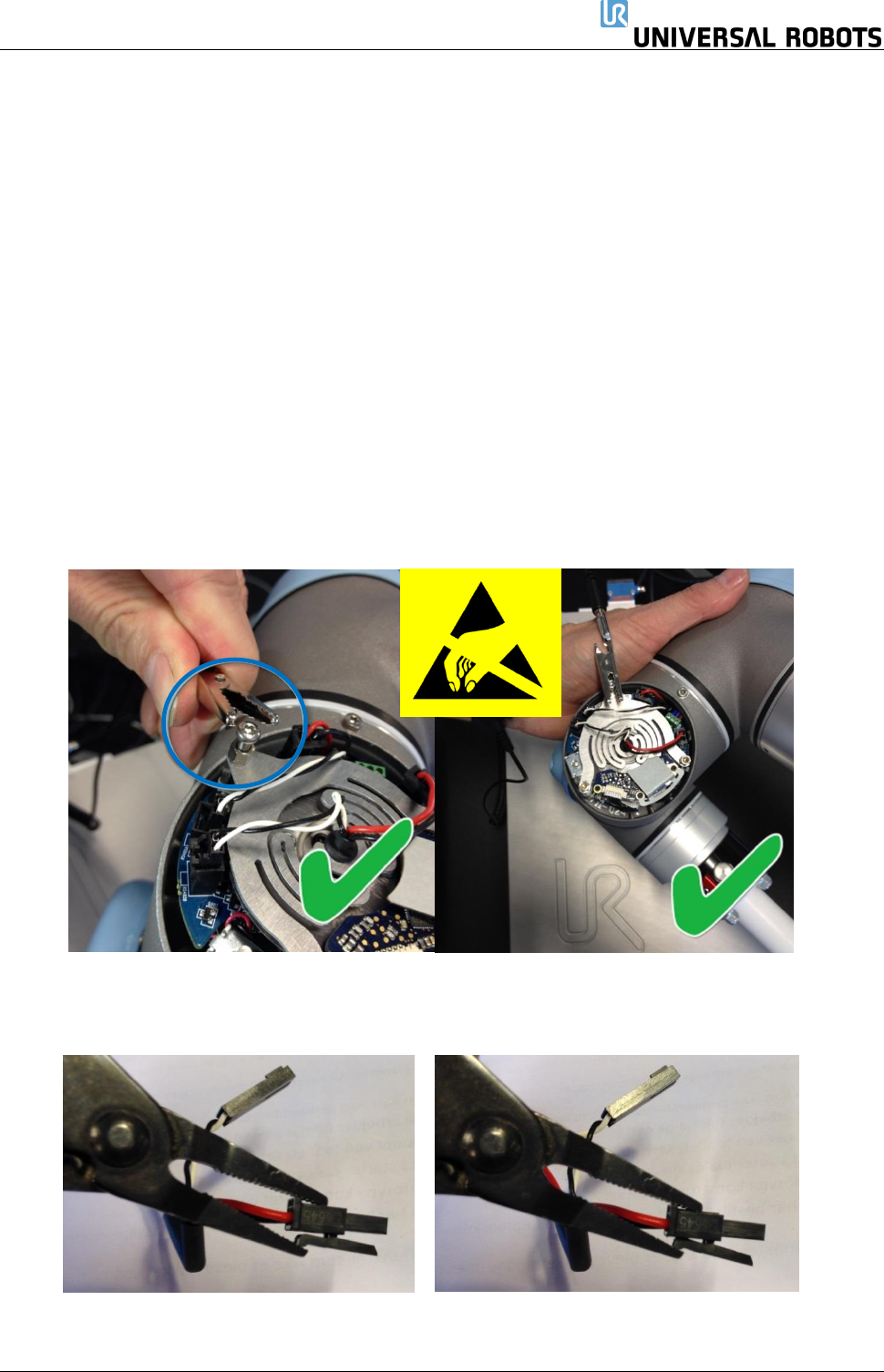
4. 拆下蓝色盖子。
5. 重新固定蓝色盖子上的螺钉,并将防静电腕带上的鳄鱼夹连接到螺钉上,如下所示。
6. 轻轻地拔出电缆连接器,但不要弯曲印刷电路板。
有些连接器配有卡扣,必须在从印刷电路板拔出之前按下卡扣。下面的示例。