ServiceManual_UR10_zh_3.2.6.pdf - 第20页
保留所有 权 利 20 Servicemanual_UR1 0_en_3.2.6 3.1 机械臂 3.1.1 将任何零件退 回优傲机 器人之前 • 移除外部的所有非 UR 设备,例如 ,夹子、软管 、电缆等。 对于安装在机器人上的 非 UR 设 备的损坏,优傲机 器人不予负责。 • 将机器人 / 零件发送 到 UR 之前,备份所有 相关文件 。优傲机器人对 于储存在 机器人中的程 序、数据或文件的丢失 不承担任何 责任。 强制措施: 如…
保留所有权利 19 Servicemanual_UR10_en_3.2.6
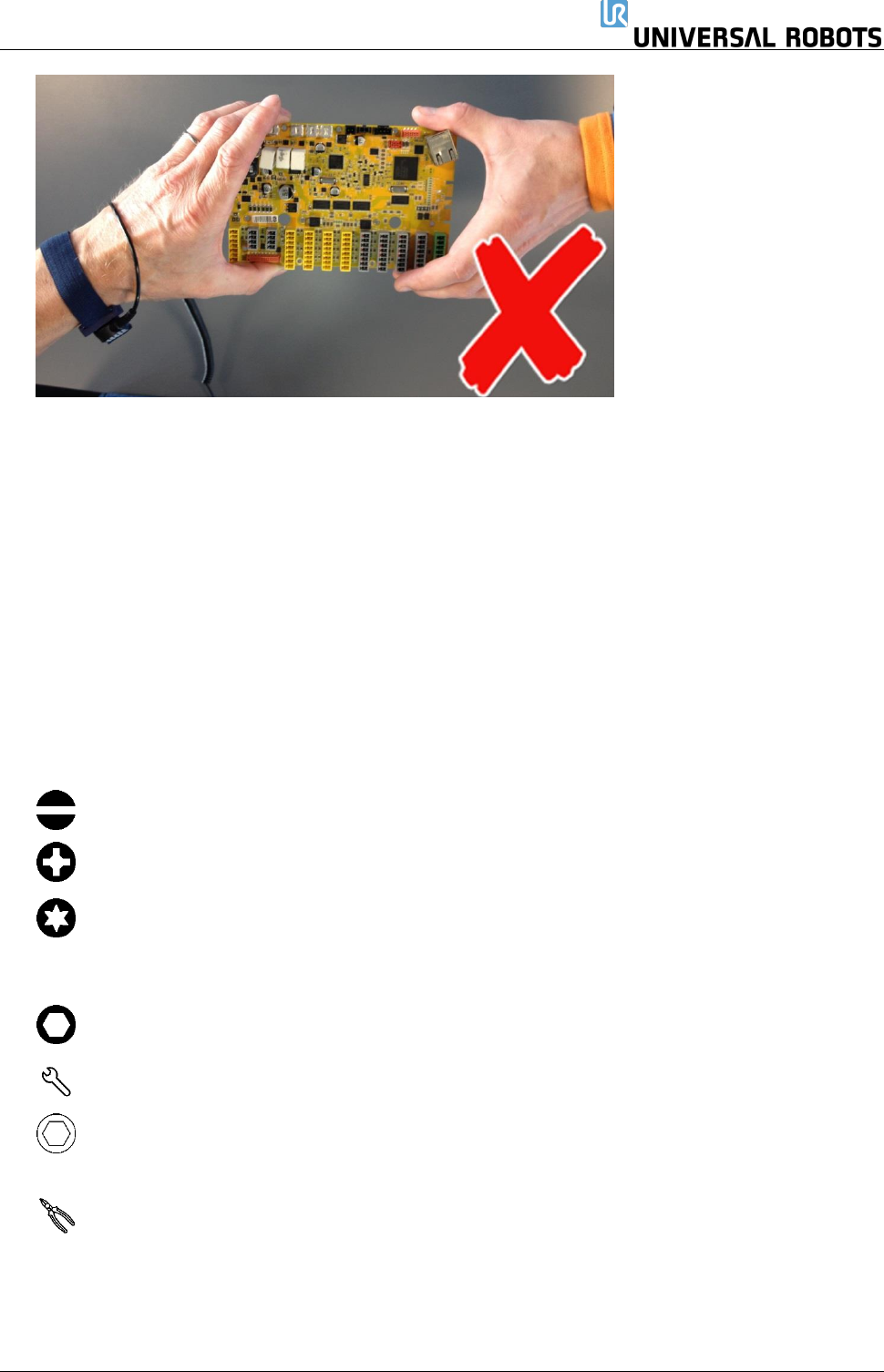
易受静电损坏的零件应防止其他人员意外触碰,且不得将未受保护的易受静电损坏的零件放在桌子上。
在寒冷天气且使用暖气时,在使用易受静电损坏零件时要特别小心,低湿度会增加静电。
3.0.1 推荐工具
机械臂:
• 维修套件—零件号码:109010
控制箱:
以下工具应该是防静电安全工具。
• 一字螺丝刀
− 0.5(用于分电盘上的端子)
• 十字头螺丝刀
− PH2(用于电源上的端子)
• 梅花头螺丝刀
− TX10(用于外部连接,即,主电源连接)
− TX20(用于印刷电路板前面的屏蔽)
− TX45(用于控制箱手柄)
• 六角螺丝刀
− 4 号尺寸(用于安全控制板和主机板)
• 扳手
− 7 号尺寸(用于耗能装置)
• 套筒螺丝刀
− 10 号尺寸(用于零件支架和接地螺母)
− 加长钻头(接近难以触及的螺母)
• 其他
− 平头钳(用于拆卸安全控制板和分电盘上的端子)
保留所有权利 20 Servicemanual_UR10_en_3.2.6
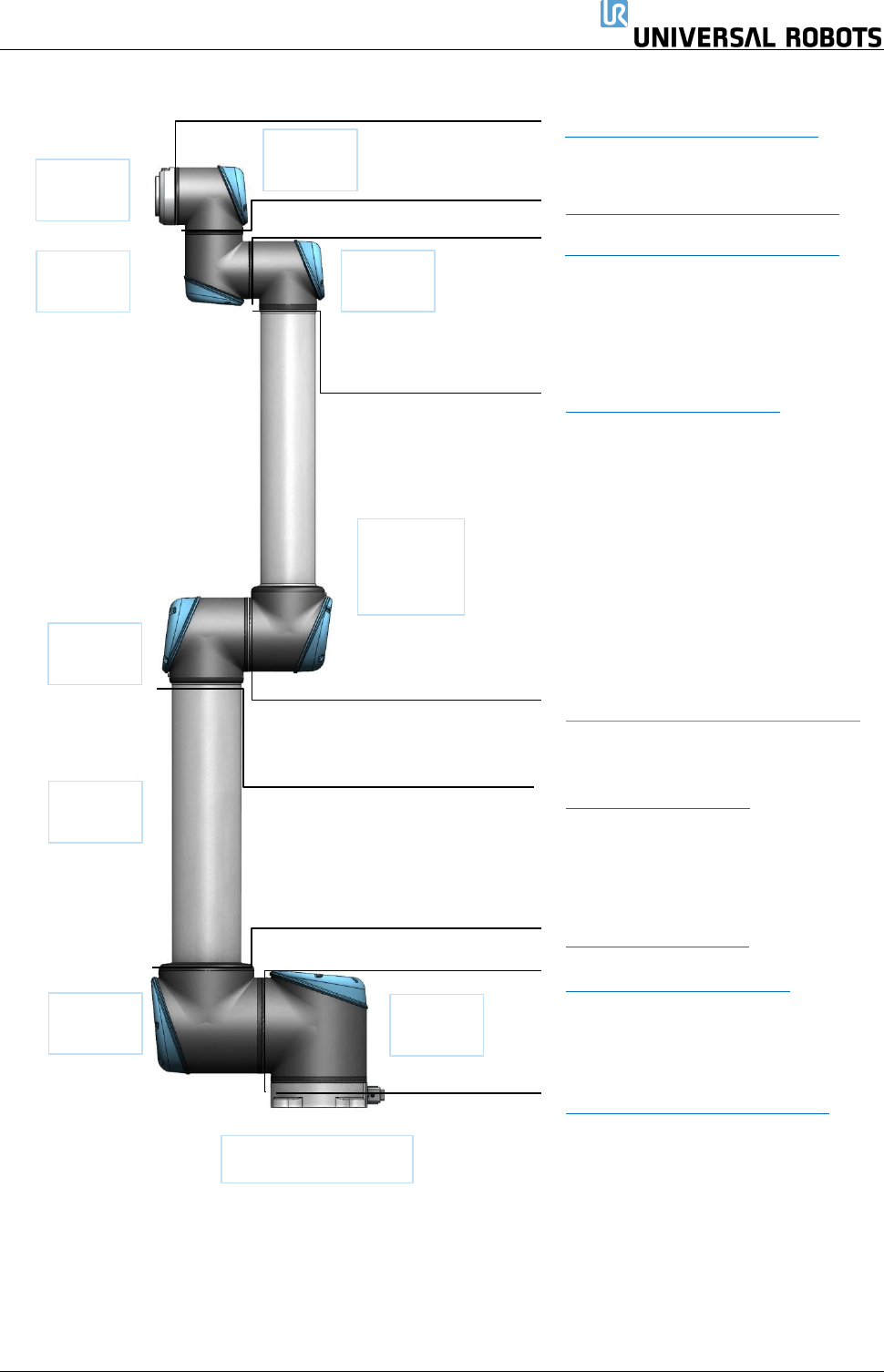
3.1 机械臂
3.1.1
将任何零件退回优傲机器人之前
• 移除外部的所有非 UR 设备,例如,夹子、软管、电缆等。
对于安装在机器人上的非 UR 设备的损坏,优傲机器人不予负责。
• 将机器人/零件发送到 UR 之前,备份所有相关文件。优傲机器人对于储存在机器人中的程
序、数据或文件的丢失不承担任何责任。
强制措施:
如果机器人/零件曾接触过存在危险化学品或材料的环境或在其中工作,
必须在发货前对机器人进行清洁。如果无法进行清洁,货物必须附有英
文的 MSDA(材料安全数据表)和清洁说明。清洁所需的工时数将按标准
费率计算。
如果发现机器人/零件不安全,无法维修,UR 有权清洁机器人/零件或拒
绝使用以及退回零件(费用由客户承担)。
注意:请注意,维修时,机器人将更新至最新的软件/固件。新零件也将更新至最新版本(硬件/软
件)。因此,安装新零件时可能需要更新 PolyScope。
• 您可以在章节 -
7中找到打包程序。机器人打包