TR7700QE_Software_ch-v3.0_20180328.pdf - 第129页
Test Research, Inc. TR7700Q E User Gu ide – S o f twar e 106 小範圍和最大範圍,其 設定同 Average(adv.) 。 2. CorMatch 模式 圖 176 :檢測模式 – CorMatch • 相似度:設定待測物與 代料影像的相似度 下限。檢測結果須 大於此值 即為合格。 • 平整化:自動計算出爬 錫並將鄰近 Lead 框導腳尾端拉至相同的水 平,以提升缺陷檢 出 率…
Test Research, Inc.
TR7700QE User Guide–Software 105
圖 173:Lead 框導角尾終止位置 – Average 搜尋方式
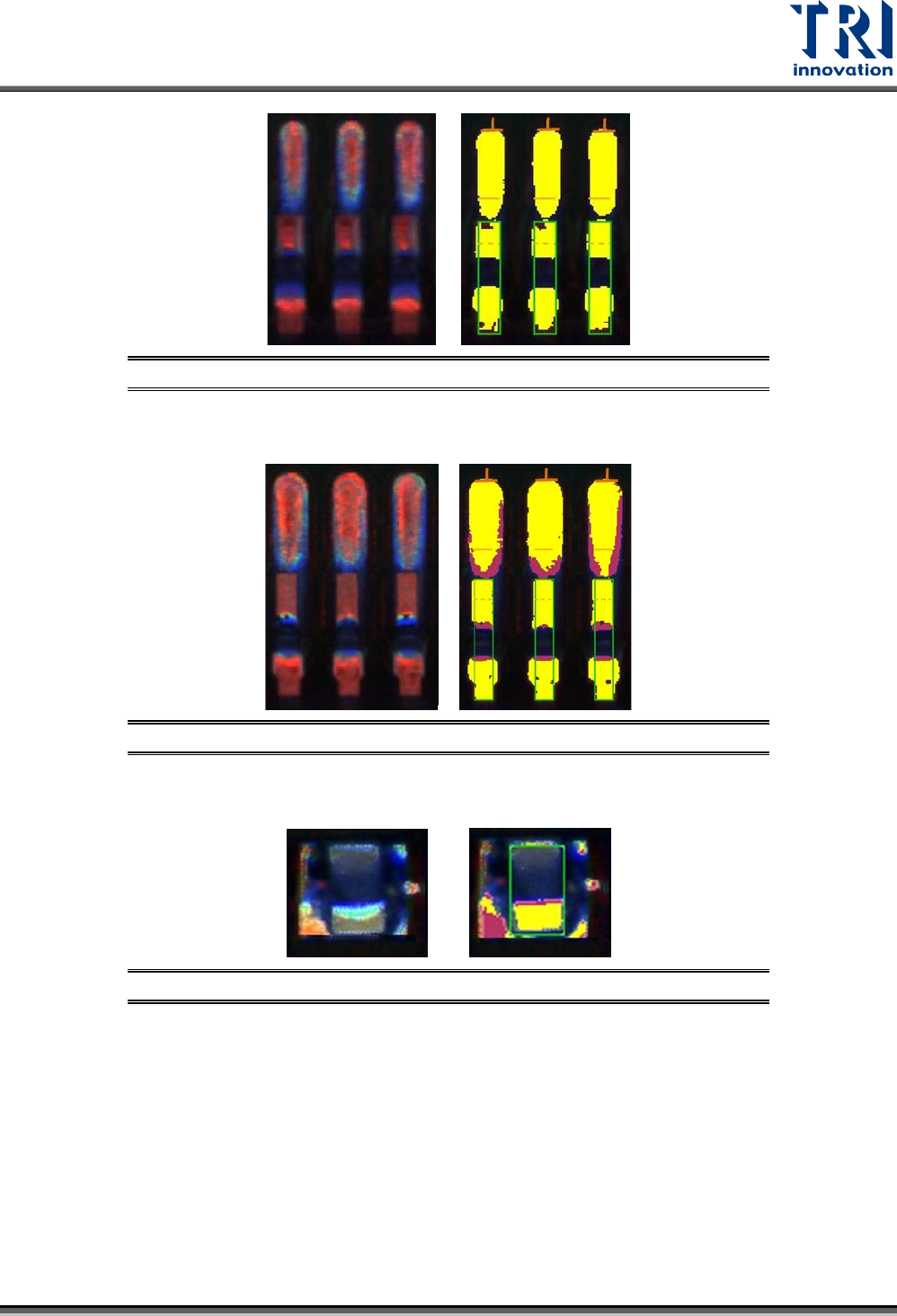
− Individual:單獨計算導腳尾終止端位置。適用於當導腳尾端顏色完整且需要精確定位
的情況,如下圖所示。
圖 174:Lead 框導角尾終止位置 – Individual 搜尋方式
− Fixed:以固定檢測框大小的方式來計算導腳尾終止端位置。適用於當包錫或不需要
精準定位的情況,如下圖所示。
圖 175:Lead 框導角尾終止位置 – Fixed 搜尋方式
− Average(adv.) :利用鄰近的 Lead 框平均值來計算導腳尾終止端位置,並開啟進階功
能比率(%)、長度、最小範圍和最大範圍。
• 比率%:設定導腳尾終止端位置的選取顏色的寬度佔檢測框寬的比例,建議值
為 50%,低於設定值將開始計算。
• 長度:設定符合 Ratio 的長度,建議值為 2 pixels。
• 最小範圍:自導腳頭起始端開始算起的搜尋區域 到導腳尾終止端之前(小於等
於 0 代表使用預設值,window的 20%)。
• 最大範圍:自導腳頭起始端開始算起的搜尋區域到導腳尾終止端之後(小於等
於 0 代表使用預設值,window的 20%)。
− Individual(adv.) :單獨計算導腳尾終止端位置,並開啟進階功能比率(%)、長度、最
Test Research, Inc.
TR7700QE User Guide–Software 106
小範圍和最大範圍,其設定同 Average(adv.)。
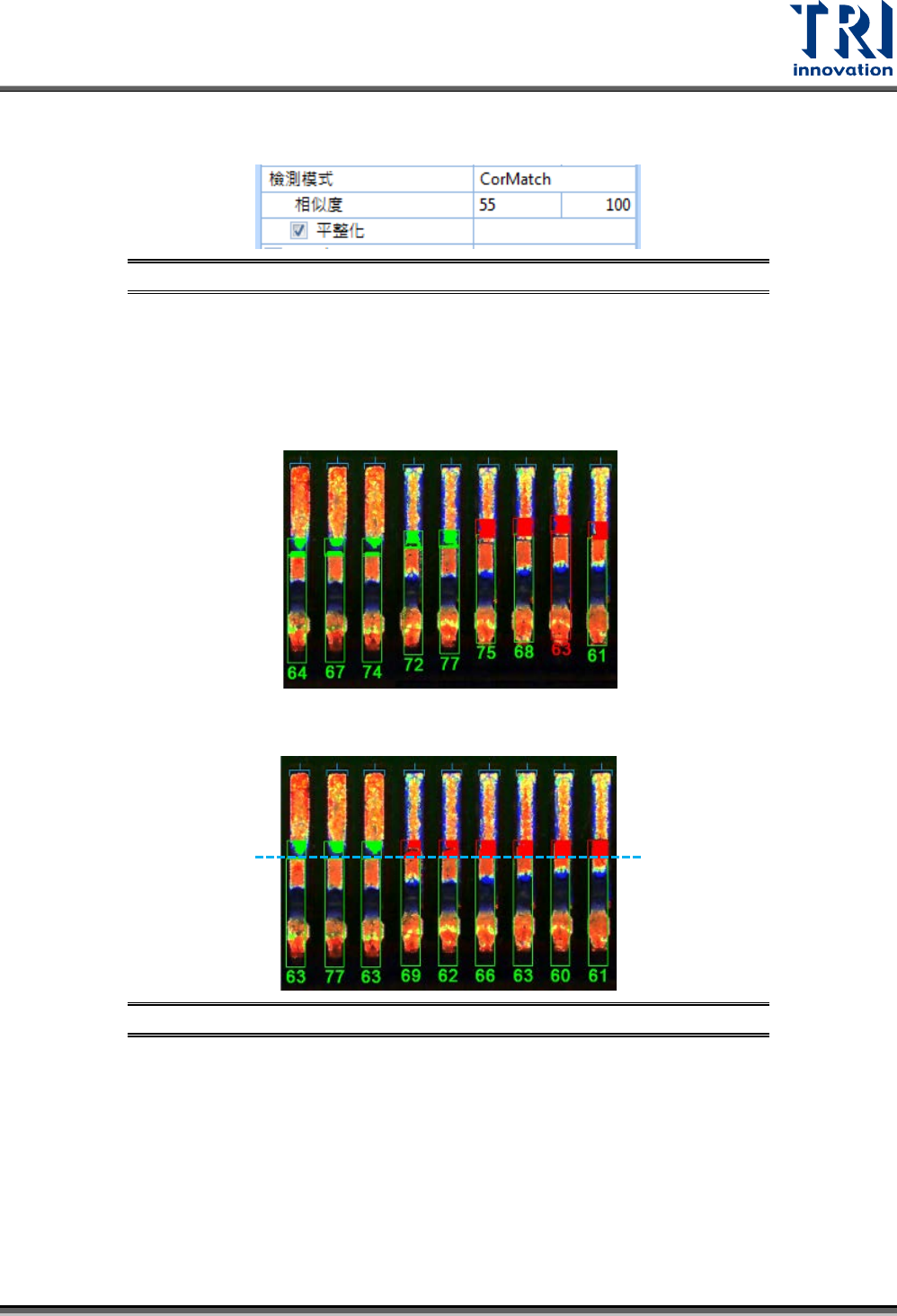
2. CorMatch 模式
圖 176:檢測模式 – CorMatch
• 相似度:設定待測物與代料影像的相似度下限。檢測結果須大於此值即為合格。
• 平整化:自動計算出爬錫並將鄰近 Lead框導腳尾端拉至相同的水平,以提升缺陷檢出
率。如下圖為勾選此功能前後的差異。
圖 177:檢測模式 – CorMatch – 平整化
搜尋焊盤:
− 檢測模式: 選擇使用 Average 或者 Individual 進行計算。
− 焊盤輔助修正腳偏移:利用測到的焊盤位置補償 Lead 框位置偏移值。
自動切齊代料:當套用元件資料庫、新增框或者新增代料影像時,會在搜尋範圍內自動調
整檢測框的位置,使其與爬錫端切齊。
進階參數與其對應的合格標準:
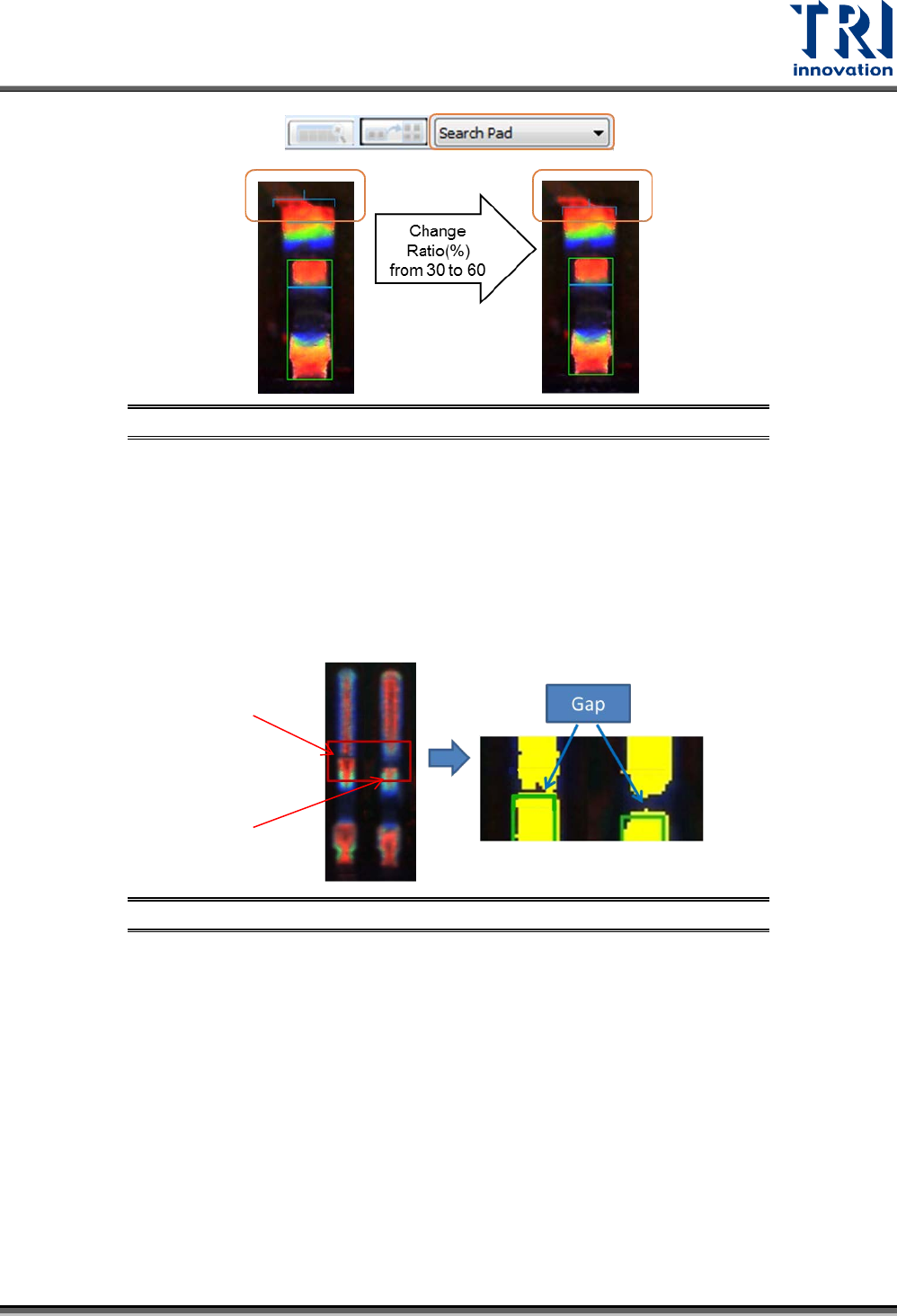
檢查焊盤比例(%):設定焊盤尾端的終點位置。如下圖所示,會由上到下進行搜尋,當焊
盤的寬度超過設定值時,才視為焊盤的終點端。
未開啟
開啟
Test Research, Inc.
TR7700QE User Guide–Software 107
圖 178:檢查焊盤比例(%)
檢查腳邊間隙:極短 Pad 錫型,空焊特徵容易被引腳遮住,可使用接近 Tail Line位置的
微小 Gap 分辨是否為空焊。
− 比率(%):設定間隙的寬度比(所選顏色寬度/Lead框的寬度),預設為 30。
− 長度:設定符合比率的連續長度。
− 最小範圍:設定間隙的負搜尋範圍。
− 最大範圍:設定間隙的正搜尋範圍。
請參照以下範例圖示:
圖 179:Lead 框進階功能 – 檢查腳邊間隙
檢查三角錫形:當錫太厚造成爬錫處非一般呈現深藍色,空焊與正常引腳特徵僅爬錫處微
微內縮之差異。 自動偵測 Pad 最大寬度作為分母(紫色實線),分子則由使用者定義適當位
置(紫色虛線)
− 比率(%):設定焊盤最窄處寬度除以焊盤最寬處寬度的比例。
− 到導腳尾端距離:設定從導腳尾終止端往外多少距離開始計算。
請參照以下範例圖示:
空焊
正常