CP6的IO代码.pdf - 第225页
Part 5 Chapter 5 Servo Adjustments Edition 1.0 5-5-2 CP-6 Series Mechanical Reference 5.1 Servo System Components A simplified illustration of the CP-6 series servo system is shown below. CP6M5075 The servo system for th…
Part 5 Chapter 5 Servo Adjustments
Edition 1.0 5-5-1 CP-6 Series Mechanical Reference
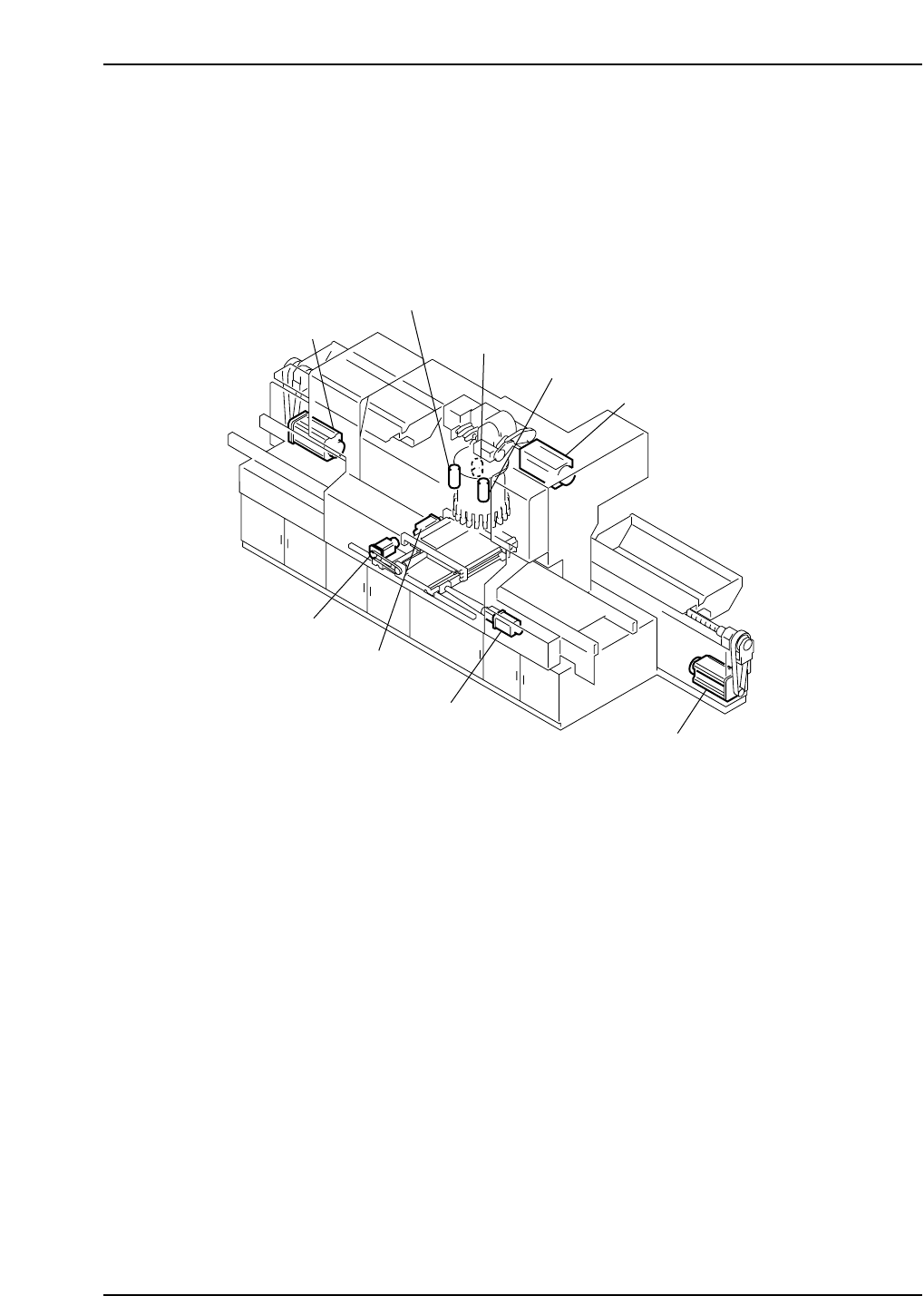
5. The Servo System
The servo system is responsible for the motions of the machine. This system carries the board(s) to
the correct placing position, carries the tape feeders to the component pick-up point, rotates the cam
turret, changes nozzle sizes, and also accurately rotates components to the desired placing angle.
The following section details the individual components of the loading position and the step-by-step
procedure for adjustments vital to maintaining this system.
Y-axis motor
D2-axis servo motor
Fine θ-axis motor
Fine θ reverse-axis motor
Nozzle change NC-axis motor
Cam-axis motor
Z-axis motor
X-axis motor
D1-axis servo motor
CP6M5074
Part 5 Chapter 5 Servo Adjustments
Edition 1.0 5-5-2 CP-6 Series Mechanical Reference
5.1 Servo System Components
A simplified illustration of the CP-6 series servo system is shown below.
CP6M5075
The servo system for the FCP-6 is a semi closed-loop system. The system consists of the
CPU and Servo boards, servo amplifiers, servo motors and servo motor encoders. The
semi closed loop configuration is achieved through the encoder-to-amplifier connection.
The machine uses the constant stream of positional data from the encoder to alter the
position of the motor. This allows the machine to keep a very tight placement tolerance
and a high rate of repeatability.
HMIV-134 CPU Board
The CPU board controls all functional decisions undertaken at the machine. This card is
responsible for the initiation of all servo axis motions.
IS70B Servo Boards
There are three servo driver cards in the VME card rack and these cards interface the
CPU board to the servo amplifiers. The first card controls the CAM, FRQ- and Z-axis.
The second card controls the X-, Y- and FQ-axis. The third card controls the D1-, D2- and
NC-axis. The cards take the binary movement data (in pulses) and direction commands
from the CPU board and send analog signals to the servo amplifiers which in turn drive
the motors.
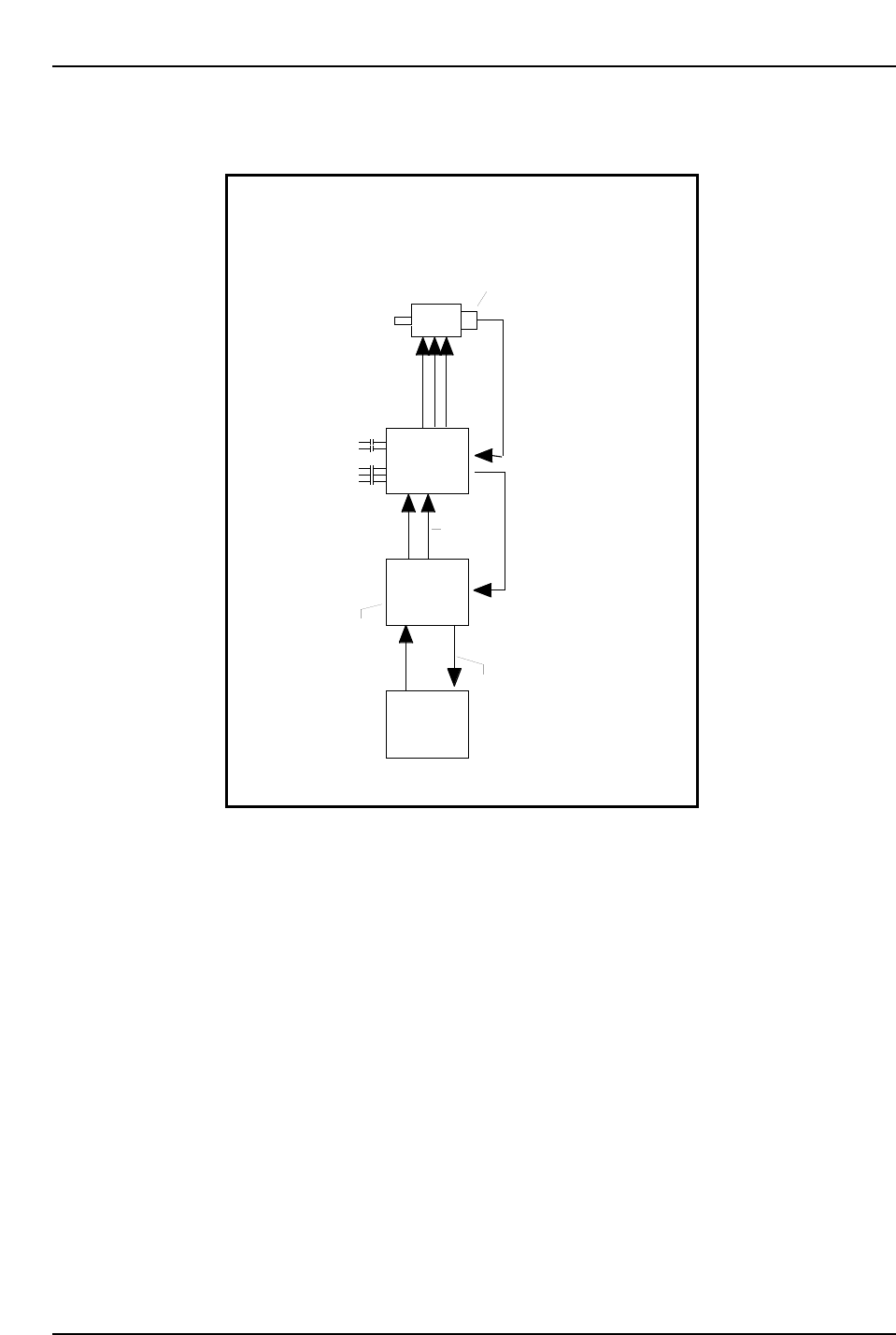
Fundamental Block Diagram of the
FCP-642 Servo System Interface
CPU
HIMV-134
Servo Board
IS70B
Servo
Amplifier
Servo
Motor
Speed Feedback Loop
Binary Data
Final Positioning Data
Speed
Command
Input
IN-B
SGB
Converts Digital to Analog
U
V
W
Pulse Generator
or
Encoder
200 VAC.
Control Circuit
Power Input
Main Power
Input
Positioning Feedback Loop
Note: For the X-, Y-axes, the speed command input line uses V-REF instead of IN-B.
Part 5 Chapter 5 Servo Adjustments
Edition 1.0 5-5-3 CP-6 Series Mechanical Reference
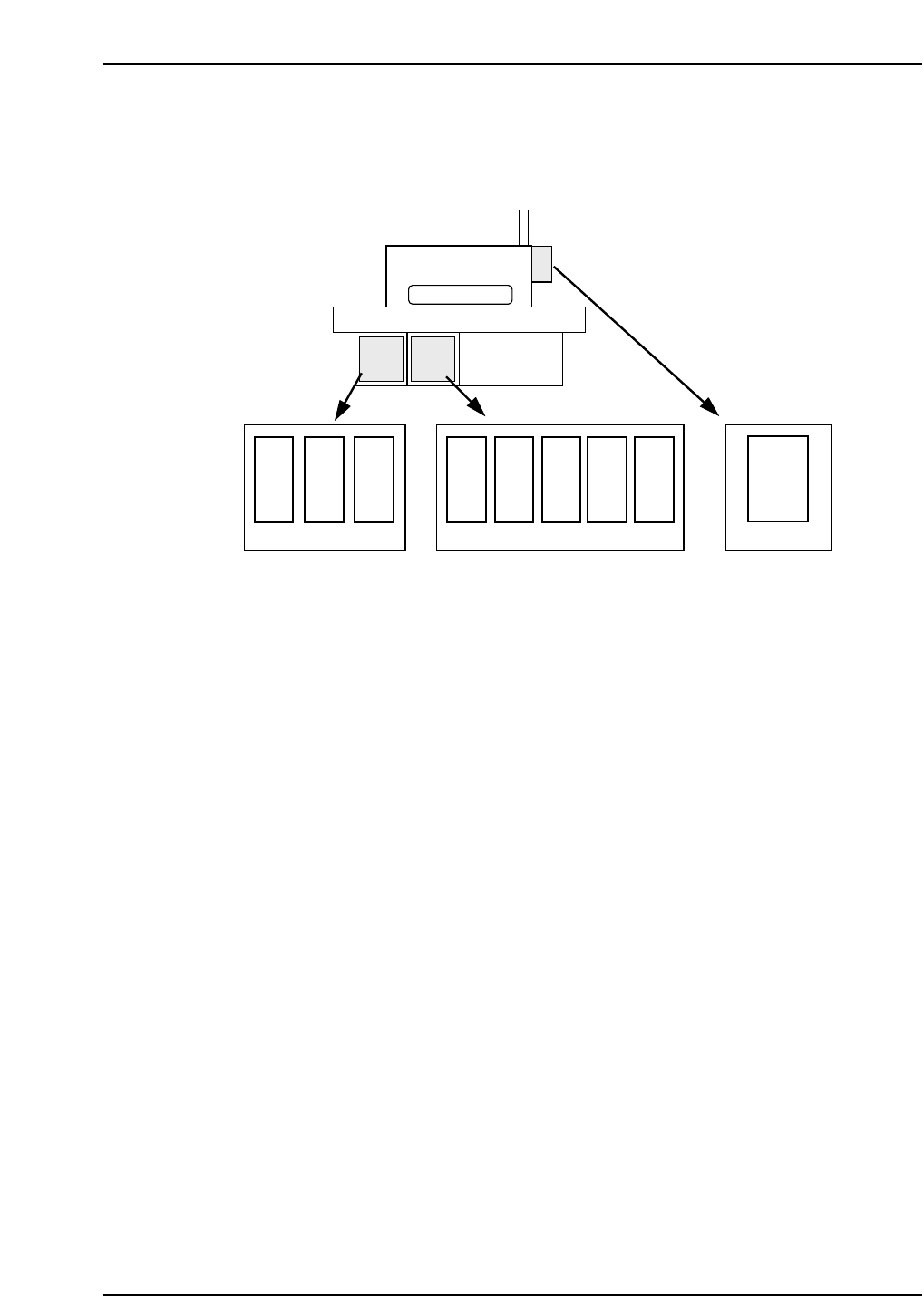
Servo Amplifiers
The amplifier takes instructions from the servo card and provides the power to the
motors. This controls the actual movement of the motor (via the motor windings). The
locations of each are depicted below.
Servo Motors
Each servo motor found on FUJI machines need to be precisely controlled. In order to
control these motors, a monitoring device called a “pulse generator” or “encoder” is
mounted to the motor shaft. The encoder monitors the rotation of the motor shaft by
tracking a circular disk attached to that shaft. A fixed number of holes are cut into this
disk which allows an infrared LED to shine through these holes. In this way the encoder
can track shaft motion. The number of holes cut into the disk determines the encoders’
resolution. Also, on one point of the encoder disk, a single hole is present which sends a
“home” pulse signal once per revolution.
The servo amplifier judges the rotational direction by comparing phase A with phase B,
to see which phase is leading the other.
Distance traveled is determined by the number of pulses received.
Speed is determined by the frequency of the pulses that are received.
X
Y
CAM
D2
D1
Z
FR
F θ
CP-6
θ
NC
Nozzle
change
Servo box 1 Servo box 2
Operation box 1
CP6M5076