SER04989020_YVL88II Service_J.pdf - 第161页
3- 140 SER04989020 調整 第 3 章 7 搭載フィードバック全体の作業フローと調整されるパラメータを下図に示しま す。 ■ 搭載フィードバック全体(ビジョ ン→レーザー)の作業フロー 20443703-00 終 了 ヘッドオフセット入力 (ヘッドオフセット編集画面) チップ部品の搭載実行 搭載フィードバック チップ部品の搭載実行 搭載フィードバック チップ部品の搭載実行 搭載フィードバック…
3-
139
SER04989020
調整
第
3
章
7
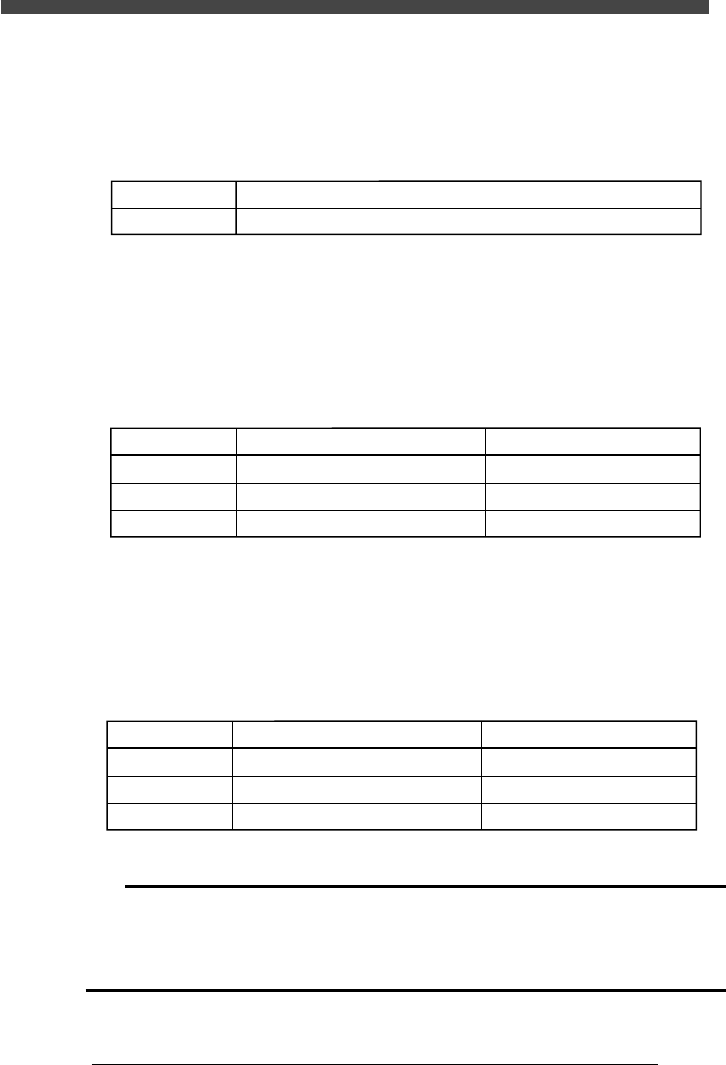
搭載フィードバックの各選択モードとそれによって調整されるパラメータについ
て説明します。
1. 認識装置
40443701-00
ビジョン
レーザー
シングル認識カメラで部品認識したとき(ヘッド1専用)
レーザーユニットで部品認識したとき
2. 調整対象
・ ビジョン認識の場合
ビジョン認識の場合は、装着動作により「FINEモード」と「QFP モード」
搭載フィードバックを行います。
40443702-00
シングル認識カメラR
移動カメラXY、ノズル偏心補正
使用しません
使用しません
使用しません
R絶対精度補正
全体の傾き
X, Y位置ずれ
角度の補正
調整対象 FINEモード QFPモード
・ レーザー認識の場合
レーザー認識の場合は、「ADJUST_CHIP」と「OFFSET」と呼ばれる搭
載プログラムを使います。これらプログラムはインストールに使用するデー
タディスクに入っています。
40443703-00
レーザー認識位置R(ヘッド1)
レーザーノズル中心(ヘッド1, 2)
R絶対精度補正(ヘッド2)
使用しません
ヘッドオフセット(ヘッド2)*
使用しません
全体の傾き
X, Y位置ずれ
角度の補正
調整対象 ADJUST_CHIP OFFSET
* この補正値はヘッドオフセット編集画面で直接入力します。
c
注意
・ 搭載フィードバックによる微調整を行う前に、「3. 画像認識装置」をはじめ、「4. フィーダー
プレート」や「6. 作動軸」の調整を完了しておいてください。
・ 搭載フィードバックは、ビジョン認識での調整(QFP部品を使ったヘッド1の微調整)を先に完
了してから、レーザー認識での調整を行ってください。
3-
140
SER04989020
調整
第
3
章
7
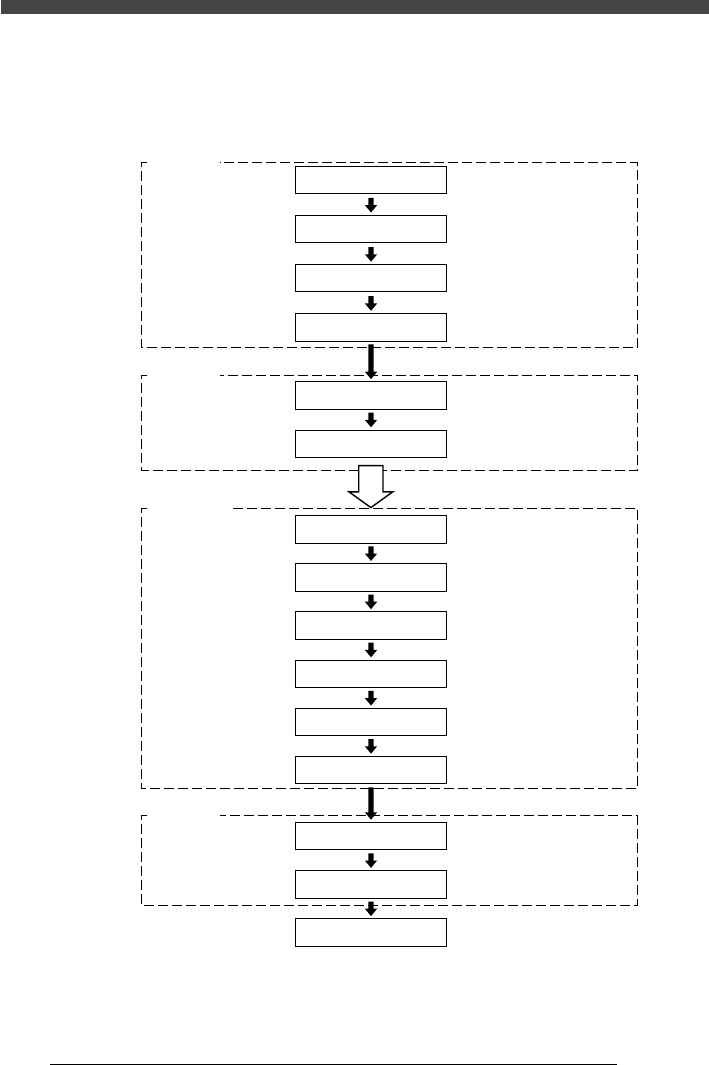
搭載フィードバック全体の作業フローと調整されるパラメータを下図に示しま
す。
■ 搭載フィードバック全体(ビジョン→レーザー)の作業フロー
20443703-00
終 了
ヘッドオフセット入力
(ヘッドオフセット編集画面)
チップ部品の搭載実行
搭載フィードバック
チップ部品の搭載実行
搭載フィードバック
チップ部品の搭載実行
搭載フィードバック
チップ部品の搭載実行
搭載フィードバック
QFP部品の搭載実行
搭載フィードバック
QFP部品の搭載実行
搭載フィードバック
QFP部品の搭載実行
[調整されるパラメータ]
シングル認識カメラR (ヘッド1)
移動カメラ位置X, Y (ヘッド1)
ノズル偏心補正X, Y (ヘッド1)
R絶対精度補正 (ヘッド1)
レーザー認識位置R (ヘッド1)
レーザーノズル中心X, Y (ヘッド1、2)
R絶対精度補正 (ヘッド2)
ヘッドオフセットX, Y (ヘッド2)
FINEモード
全体の傾き =
X, Y位置ずれ =
QFPモード
角度の補正 =
ADJUST-CHIP
全体の傾き =
X, Y位置ずれ =
角度の補正 =
OFFSET
3-
141
SER04989020
調整
第
3
章
7
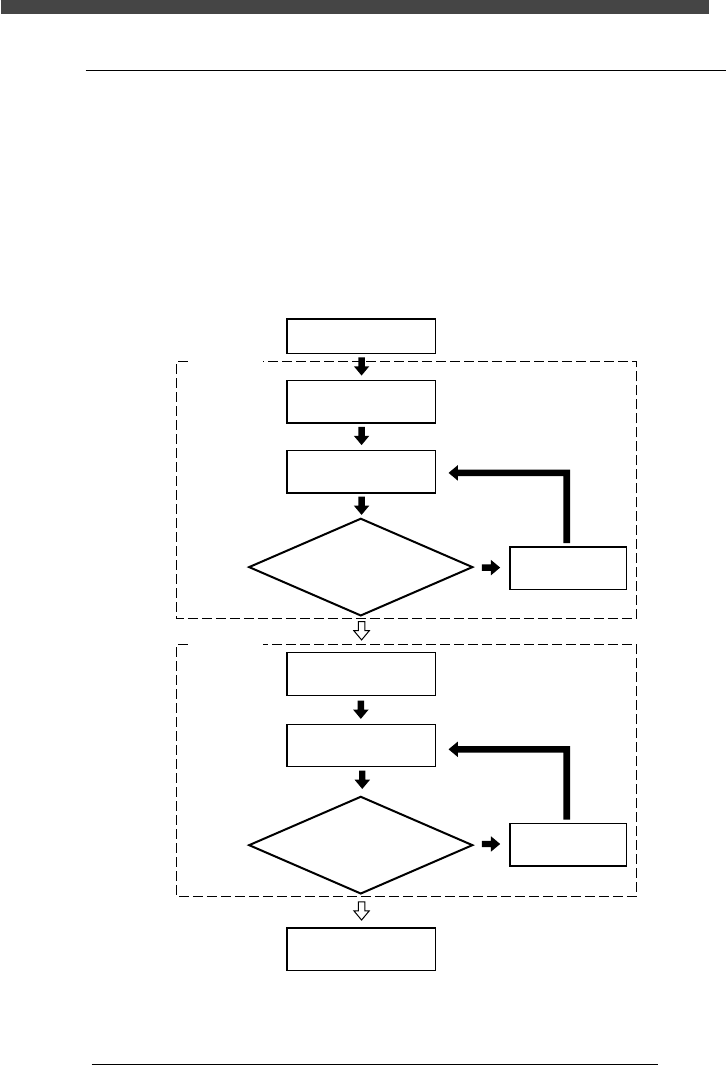
7.2 搭載フィードバック(ビジョン)
シングル認識カメラ(ビジョンカメラ)で部品認識して試搭載した後、その結果
に基づいて搭載精度に関する微調整をします。
この搭載フィードバックでは、ビジョン認識可能なヘッド1 のみが調整対象に
なります。試搭載する部品はQFP が適しています。下図のフローチャートを参
照して、搭載ズレがなくなるまで「搭載実行」と「搭載フィードバック」を繰り
返してください。
■ 搭載フィードバック(ビジョン)フローチャート
20443704-00
NO
YES
基板と部品の準備
搭載準備
搭載実行
搭載ズレがあるか?
(全体の傾き→X, Y位置ずれ)
搭載準備
搭載実行
搭載ズレがあるか?
(角度の補正)
「7.3搭載フィードバック
(レーザー)」へ
搭載
フィードバック
(ビジョン)
YES
搭載
フィードバック
(ビジョン)
NO
FINEモード
QFPモード