SER04989020_YVL88II Service_J.pdf - 第171页
3- 150 SER04989020 調整 第 3 章 7 7.2.4 搭載フィードバック( FINE モード) 部品を搭載したら、実装状態を評価し、その結果に基づいて「搭載フィードバッ ク」ユーティリティで微調整をします。 1 最初に、R 方向のズレ量を調べます。 Q F P の四隅に注目して、ランドパターンとの傾き角度を調べてください。 (X Y 方向のズレと混同しないよう注意してください。 ) 目視では実装状態の評価が難しい場合、…
3-
149
SER04989020
調整
第
3
章
7
7.2.3 搭載実行(FINEモード)
前述の準備が完了したら、自動運転モードで部品の試搭載を行います。 (自動運
転の詳細は、マウンターのオペレーションマニュアルをご覧ください。)
1
安全を確認して、非常停止状態を解除します。
非常停止ボタンを回転解除し、YPU の[READY]ボタンを押してください。
e
2
自動運転での基板を指定します。
「1/1/D3 生産基板切替」を選択実行して、基板名「CUK_92001_1」を指定
してください。(最初の基板選択では、途中のコマンドは省略されます。)
準備の際に基板データを「1/2 データ情報」モードで修正した場合は、基板
選択は省略できます。 (ただし、「1/ 自動運転」モードに入ったときに運転モ
ニター表示が「リセット状態」でない場合は、「E/ 中止終了」→「E2 リセッ
ト」を実行して修正データを更新する必要があります。)
3
自動運転で基板に部品を搭載します。
「A/ 運転コマンド」→「A2 自動運転」を選択実行してください。
自動運転中にQFP を手でヘッド 1 に吸着させる方法は、下記の「要点」の手
順に従ってください。
g
60443714-00
<<モード>> 1/自動運転
A/運転コマンド
A2 自動運転 (RUN)
運転モニター
自動運転中
<コマンドリスト>
n
要点
トレイチェンジャーを使用しないときは、次のように手でQFPをヘッド1に取り付けてください。
1. 自動運転でヘッド1が吸着ポイント(準備の時に指定したフィーダーセット番号の位置)の真上
に移動したときに、YPUの[STOP]キーを押して、ヘッド部を一時停止させます。
2. 手でQFPをヘッド1に取り付けます。
3. YPUの[RUN]キーを押して自動運転が再開し、部品を基板に搭載します。
w
警告
QFPを手で取り付けるときに、不用意にYPUの[RUN]キーを押さないように十分注意してください。
ヘッド部が動き始めますので危険です。また、QFPを取り付けてYPUの[RUN]キーを押す前に、安全
を確かめてください。
3-
150
SER04989020
調整
第
3
章
7
7.2.4 搭載フィードバック(FINEモード)
部品を搭載したら、実装状態を評価し、その結果に基づいて「搭載フィードバッ
ク」ユーティリティで微調整をします。
1
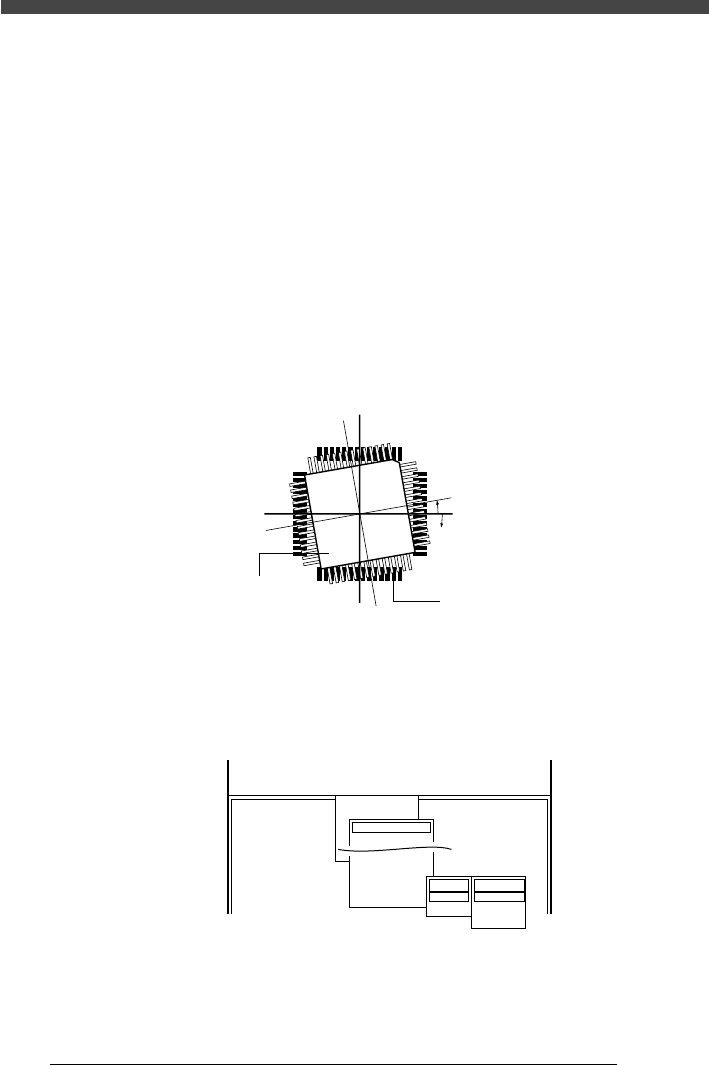
最初に、R 方向のズレ量を調べます。
QFP の四隅に注目して、ランドパターンとの傾き角度を調べてください。
(XY 方向のズレと混同しないよう注意してください。)
目視では実装状態の評価が難しい場合、拡大鏡で観察してください。あるい
は、基板をコンベアに固定して、移動カメラで拡大された映像を観察してくだ
さい。
QFP が反時計回りにズレている場合:+ 値の傾き
QFP が時計回りにズレている場合 :- 値の傾き
■ R 方向ズレとランドパターンの関係
20443715-00
R+
R-
ランドパターン
QFP
2
「搭載フィードバック」を実行します。
1.「3/3/B1 調整項目選択」→「搭載フィードバック」を選択実行します。
2.「ビジョン」→「全体の傾き」を選択します。
60443716-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
調整・検索対象
搭載フィードバック
認識装置
ビジョン
レーザー
調整対象
全体の傾き
X,Y位置ずれ
角度の補正
3-
151
SER04989020
調整
第
3
章
7
3
再度 [ENTER]キーを押して、次のステップに進みます。
調整を中止したい場合は、[ESC]キーを押してください。
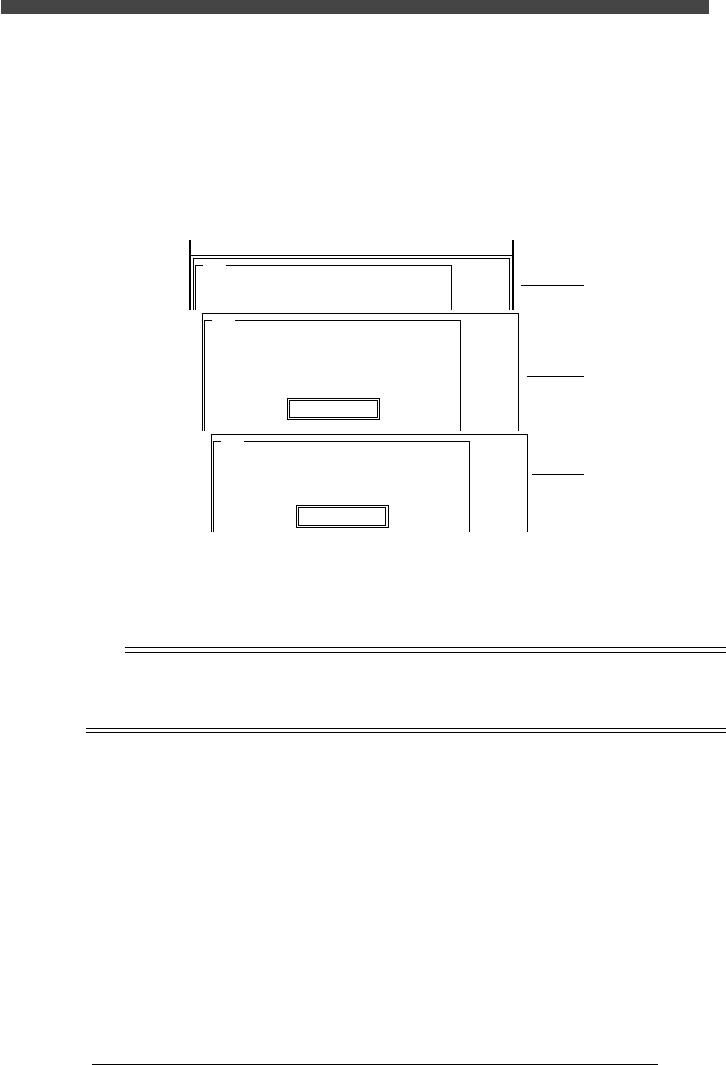
4
カメラ番号を入力し、[ENTER]キーを押します。
カメラ番号は視野の小さい順に1、2、3 となります。
5
R 方向のズレ量を入力し、[ENTER]キーを押します。
Step 1の評価結果より傾き角度を入力してください。
60443717-00
<<モード>> 3/マシン調整
A570
ビジョン認識では搭載した部品の傾きを修正します。
この調整は部品を調整用のテストボード上へ、FINEモードにて
試実装した結果を元に調整します。各カメラ毎に調整可能で、・・・
A580
試実装で部品を認識したシングル認識カメラ番号を入力してください。
キー入力終了後、[ENTER]キーを押してください。
[ESC]キーを押せば、調整を途中で止めます。
A584
部品の傾きを入力して下さい。
部品がパターンからどれだけ回転しているかという角度を入力
します。たとえば、+0.1度回転していたら+0.1と入力します。
・・・
カメラ番号 1
角度(deg.) +0.1
Step 5
Step 4
Step 3
6
入力値を確認して、再度 [ENTER]キーを押します。
入力値に基づいて、自動的に補正値が計算されます。
これにより、カメラ位置座標の中のシングル認識カメラR 値が補正されます。
n
要点
ヘッド1に関しては、この調整が完了すれば搭載角度による傾きズレは起こりません。もしズレが
起こる場合には部品情報を見直し、「シングル認識カメラスケール」の再調整をする必要がありま
す。
7
調整結果を保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終
了」を選択実行してください。)
8
搭載フィードバックによる微調整の効果を確認します。
再び基板に部品を搭載して、実装状態を確認してください。
傾き角度が0になるまで上記手順を繰り返してください。