00196257-02 SG SIPLACE Vision FSE_de.pdf - 第36页
Bauelemente-Sensoren Unterscheidung der BE-Höhe und der Körperhöhe Student Guide SIPLACE Vision (Digital) FSE 36 Fehlt der BE-Sensor a m C&P12-Kopf entfalle n alle BE-Anwesenheit stests (Erweitert, Kein Vakuum, Bauel…
Bauelemente-Sensoren
Versionen des BE-Sensors
35 Student Guide SIPLACE Vision (Digital) FSE
Bauelemente-Sensoren
4 Bauelemente-Sensoren
Versione n des BE-Sensors
4.1 Versionen des BE-Sensors
Den Bauelement-Sensor (BE-Sensor) gibt es in 2 Versionen:
1. Option BE-Sensor für den Bestückkopf C&P12 (DLM1 oder DLM2).
Dieser arbeitet nach dem Schattenwurfverfahren, um Anwesenheit oder BE-Höhe an der Pipette zu
bestimmen.
Hierbei wird ein Pipettenschatten bzw. ein Schatten von Pipette mit BE mit einem schattenlosen
Zustand einer IR-Lichtschranke während einer Kalibrierung verglichen.
2. BE-Sensor für den Bestückkopf C&P20.
Dieser arbeitet nach dem Z-Positionsmessverfahren, um die Anwesenheit oder die Höhe des
Baulementes an der Pipette zu bestimmen.
Hierbei wird bei Unterbrechen bzw. Freigeben einer Lichtschranke der Z-Positionswert ermittelt.
Die ermittelten Z-Positionswerte lassen Rückschlüsse auf BE-Höhe, BE-Anwesenheit, sowie
Pipettenverschmutzung und -verschleiß zu.
BE-Anwes enheitsprüfungen
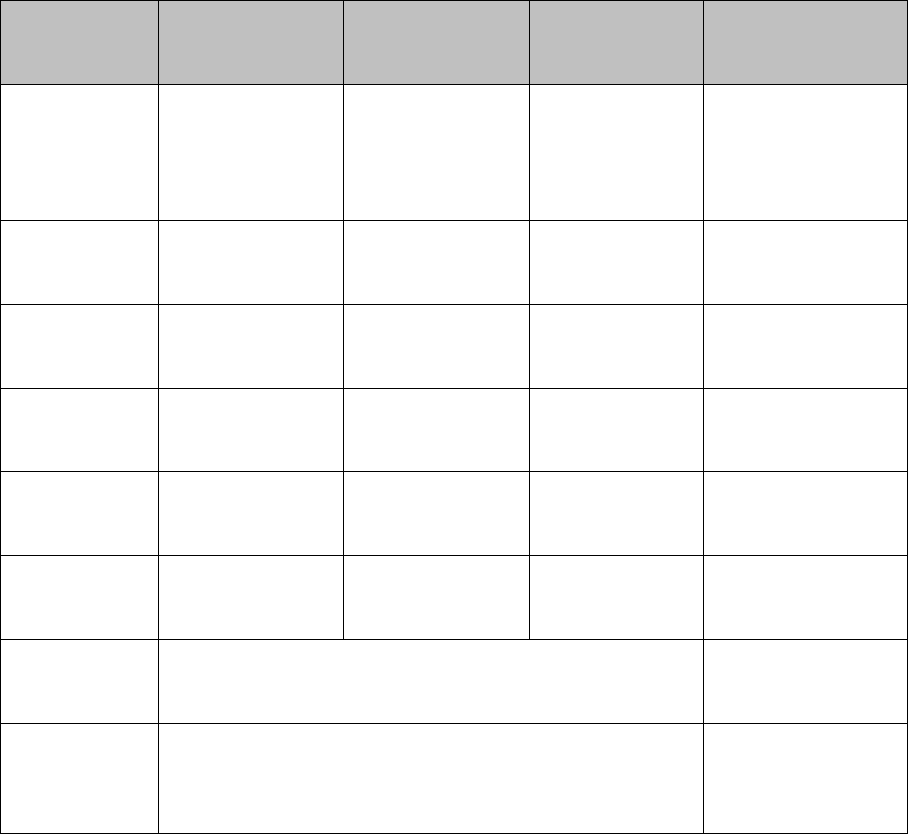
4.2 BE-Anwesenheitsprüfungen
Die folgenden Einstellungen können im SIPLACE Pro GF-Editor unter "Erweiterte Bearbeitung"
vorgenommen werden:
SIPLACE Pro
Einstellung
C&P20
Bestückkopf
C&P12
Bestückkopf und
Option BE-Sensor*
C&P6
Bestückkopf
TwinHead
Bestückkopf
Keine Keine BE-
Anwesenheits-
oder
Höhenüberprüfung
Keine BE-
Anwesenheits-
oder
Höhenüberprüfung
Keine BE-
Anwesenheits-
oder
Höhenüberprüfun
g
Keine BE-
Anwesenheits- oder
Höhenüberprüfung
Normal BE-Anwesenheit
durch BE-Sensor-
resultat
Prüfung der BE-
Anwesenheit durch
Vakuumcheck
BE-Anwesenheit
durch
Vakuumcheck
BE-Anwesenheit
durch Vakuumcheck
Erweitert Prüfung der BE-
Anwesenheit durch
BE-Sensor
Prüfung der BE-
Anwesenheit (mit
Option BE-Sensor)
NICHT möglich NICHT möglich
Kein Vakuum Prüfung der BE-
Anwesenheit durch
BE-Sensor
Prüfung der BE-
Anwesenheit (mit
Option BE-Sensor)
NICHT möglich NICHT möglich
Bauelementdick
e
Prüfung der BE-
Höhe durch BE-
Sensor
*BE-Höhe (vor
Bestücken) mit
Option BE-Sensor
NICHT möglich NICHT möglich
Bauelementdick
eKeinVak.
Prüfung der BE-
Höhe durch BE-
Sensor
*BE-Höhe (vor
Bestücken) mit
Option BE-Sensor
NICHT möglich NICHT möglich
Pipetten-
Qualitätscheck
Pipettenüberprüfung je nach Pipettenprogrammierung durch
Vakuumchecks und optisches Scanning (je nach
Pipettengröße)
-
* Am C&P12 Kopf ist die BE-Sensor Testmöglichkeit nur vor
bestücken gegeben und sie ist Pipettentyp- und BE-Höhen
abhängig. Pipetten 14 mm lang oder länger; BE-Höhe 0,x bis
ca. 4 mm.
Bauelemente-Sensoren
Unterscheidung der BE-Höhe und der Körperhöhe
Student Guide SIPLACE Vision (Digital) FSE 36
Fehlt der BE-Sensor am C&P12-Kopf entfallen alle BE-Anwesenheitstests (Erweitert, Kein Vakuum,
Bauelementdicke bzw. Bauelementdicke ohne Vakuum) ersatzlos.
Untersch eidung der BE-Höhe und der Körperhöh e
4.3 Unterscheidung der BE-Höhe und der Körperhöhe
Die Z-Körperhöhe (Höhe BE-Mitte) muss für den BE-Sensor korrekt programmiert werden. Außerdem
muss Wert gelegt werden auf korrekte Höhenbeschreibung, damit die Kombination von BE und Pipetten
in den korrekten Fokusbereich der BE-Kamera gebracht werden kann.
BE-Sensor am Bestückkopf C&P12
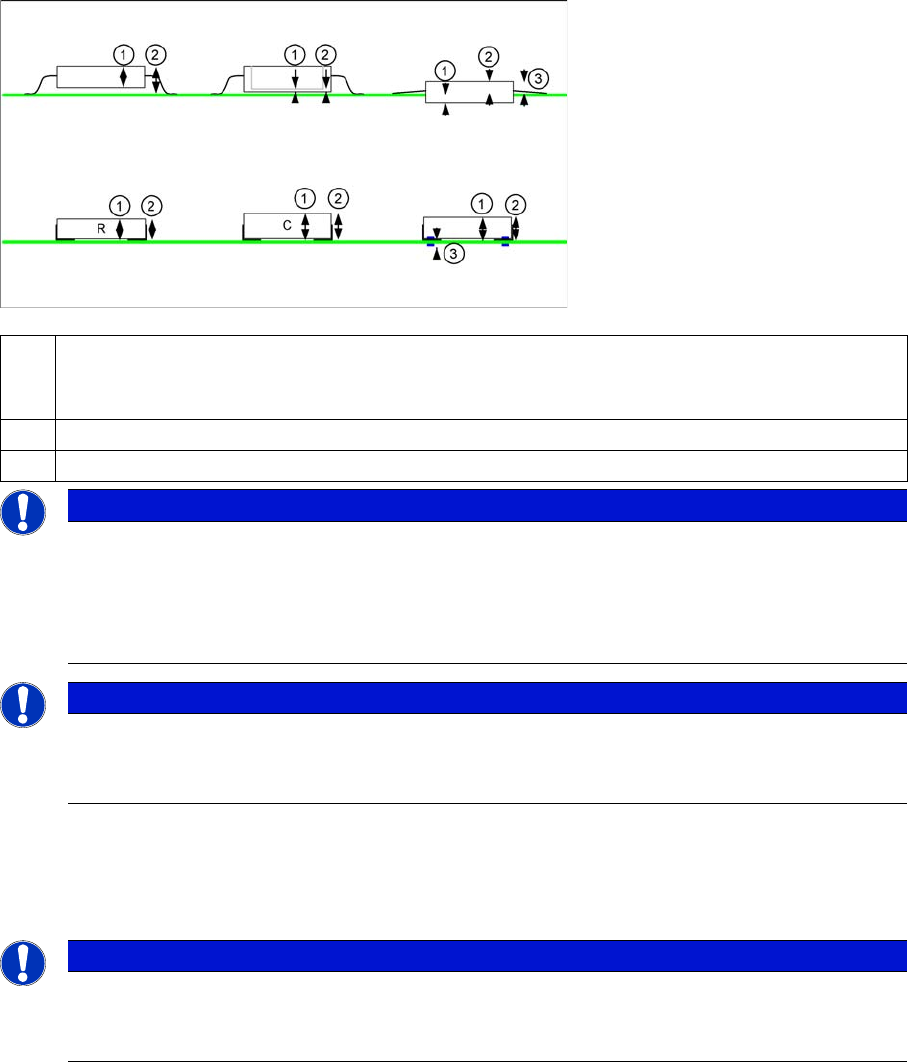
4.4 BE-Sensor am Bestückkopf C&P12
Der BE-Sensor ermittelt die Pipettenlängendifferenz gegenüber der letzten Vermessung der Pipette.
1 Körperhöhe, die (theoretisch) für den BE-Sensor einzugeben ist (die BE-Höhentoleranz sollte so
hochgewählt werden dass die elektrischen Anschlußhöhen ggf. mitgemessen werden könner
(z.B. Ballradius, J-Lead ½ Pinlänge, Säulenhöhe usw.)
2 BE-Gesamthöhe, die für die Z-Zielposition und Kamerafokushöhenbestimmung benutzt wird.
3 Zentrierstifthöhe (in Zukunft)
HINWEIS
CHIP Bauformen
Bei ICOS-Beschreibungen wurden Körpermaße oft als "Mittelwerte" angegeben, wobei die
Toleranzen dann entsprechend hoch programmiert waren (gemeinsame GF für R und C). Für
die BE-Höhenmessung müssen die R und C- CHIP-GF"s nun unterschieden und korrekt
programmiert werden.
HINWEIS
QFB und SO-Bauform
In der Praxis sind die Höhenwerte für SO und QFP gleich dem Z-Gesamtwert, denn die
zusätzlichen Beinchenhöhen liegen innerhalb der gegebenen Höhentoleranz.
HINWEIS
Keine Prüfung auf korrekten Pipettentyp
Es wird durch den BE-Sensor also nicht der Pipettentyp geprüft, dies geschieht weiterhin mit
dem Pipettenhöhenreferenzlauf.
Bauelemente-Sensoren
BE-Sensor am Bestückkopf C&P12 Aufbau und Prinzip
37 Student Guide SIPLACE Vision (Digital) FSE
Aufbau und Prinzip
4.4.1 Aufbau und Prinzip
Einschränkungen
4.4.2 Einschränkungen
Folgende Einschränkungen ergeben sich aus der mechanischen Konstruktion:
▪ Ist eine Pipette kürzer als 13 mm, so kann die leere Pipette im IR-Strahlgang nicht gemessen
werden. Eine BE-Erkennung ist an dieser Pipette nicht möglich.
▪ Sind Bauelemente höher als etwa 4 mm, so schatten sie den gesamten IR-Strahl ab. Eine BE-
Erkennung ist in diesem Falle nicht möglich.
Folgende Einschränkungen ergeben sich aufgrund der hohen Bestückgeschwindigkeit:
▪ Es kann im Sensor nicht sofort erkannt werden, ob ein BE erfolgreich abgeholt oder bestückt wurde.
▪ Wegen der Ablaufoptimierung für optimale Bestückleistung wird nach Abwerfen nicht überprüft, ob
das BE erfolgreich abgeworfen wurde:
Wird ein Bauelement, welches im BE-Sensor erkannt werden soll, an der Abwurfposition
abgeworfen, so wird nach dem Abwurfvorgang NICHT mehr überprüft, ob das BE wirklich
abgeworfen wurde. Dies könnte zu Abholversuchen führen, obwohl ein BE an der Pipette "klebt".
Messablä ufe
4.4.3 Messabläufe
BE-Sensor kalibrieren
4.4.3.1 BE-Sensor kalibrieren
In SITEST wird der BE-Sensor in drei Schritten kalibriert; indem die Grenzwerte Dunkel & Hell ermittelt
werden.
▪ Der Dunkelwert wird bei abgeschalteter IR-Senderdiode gemessen und so der Fremdlichteinfall
erkannt.
▪ Der Hellwert wird bei eingeschalteter IR-Senderdiode ermittelt und damit der schattenlose, volle
Beleuchtungswert.
▪ Die Beleuchtungsdifferenz bildet den Bezugswert für die späteren Messungen zum Schattenwurf
der "leeren" und "BE tragenden" Pipetten.
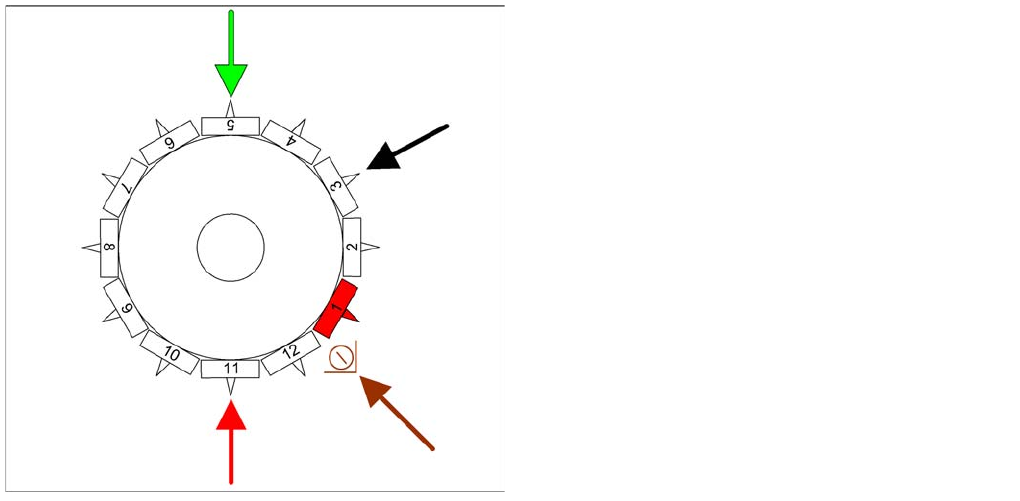
▪ Der Sensor ist zwischen Sternposition 11 und 12
(4 Uhr- und 5 Uhr-Position) montiert.
▪ Ein IR-Strahl (Laserklasse 1) wird durch eine
Schlitzmaske auf einen Empfänger gerichtet. Je nach
Intensität bzw. Abschattung wird ein höherer oder
niedrigerer Spannungswert ausgegeben und
digitalisiert.
▪ Diese Messwerte können eine "leere Pipette", eine
"Pipette mit Bauelement" oder mit "Verschmutzung"
(z. B. Lot) repräsentieren und zu entsprechender
Weiterverarbeitung führen.