D-serie level 1 EN.pdf - 第157页
SITEST Calibrating and Teaching Machine Positions Calibration Basics S tude nt Guide Advanced Level 1 SIPLACE D-Series EN 05/2007 SITEST 9-13 The positioning dr ive recognizes the fixe d conveyor side( s) (two for dual…
SITEST
Calibration Basics Nozzle Changer (C&P Head)
Student Guide Advanced Level 1 SIPLACE D-Series
SITEST EN 05/2007
9-12
Sequence segment offset bottom (II):
9-5: Sequence at one nozzle:
After the segment offset up (I) calibration step has been performed, the calibration procedure for the
segment offset down (II) begins for C&P DLM 3:
Is the calibration tool picked with a Nozzle under 0 degree; optically centered and placed with the
PCB-camera is the exact placement position determined (in µm).
Is the calibration tool picked with a Nozzle under 90 degree; optically centered and placed with the
PCB-camera is the exact placement position determined (in µm).
Is the calibration tool picked with a Nozzle under 180 degree; placed with the PCB-camera is the
exact placement position determined (in µm).
Is the calibration tool picked with a Nozzle under 270 degree; placed with the PCB-camera is the
exact placement position determined (in µm).
This sequence is repeated. From the 8 placement positions is the average value of the place.
Deviation calculated and taken for the seg. offset.
9.3.3 Nozzle Changer (C&P Head)
Each nozzle magazine has a fiducial which will recognize during the calibration procedure at first.
optional, calibrate the pick up height from the nozzle changer.
optional, calibrate the reject position from the nozzle changer, necessary to reject nozzle which are
defect.
9.3.4 Calibrating and Teaching Machine Positions
New function for calibrate the positions is the teach menu before calibrate, so that you can teach the
correct position for a successful calibration.
9.3.4.1 Conveyor Sides
This new calibration procedure is necessary for the modular conveyor system.
With the modular conveyor are all conveyor sides adjustable. For adjustment the conveyor sides we use
one stepping motor which is connected via a toothed belt to the adjustment unit. The position of the
conveyor side is recognized by a proximity switch, meaning that there is a switching point for each
conveyor side. With this calibration the switch points are optimized of the entire travel range of the width
adjustment. Calibration is required to ensure that the two positioning drives move the conveyor sides
parallel to one another.
Automatically Sequence (Transport mapping):
Initialize the positioning drive, move to the right side (limit switch)
ATTENTION:
Before starting calibration of the nozzle changer, check the nozzle changer configuration and
the component level.
SITEST
Calibrating and Teaching Machine Positions Calibration Basics
Student Guide Advanced Level 1 SIPLACE D-Series
EN 05/2007 SITEST
9-13
The positioning drive recognizes the fixed conveyor side(s) (two for dual conveyor) and moves the
flexible conveyor side(s) to the standard position of 55 mm and then accurately measures the
position set.
The positioning drive moves the conveyor side(s) step-by-step (10 mm steps) and determines the
offset of the switching points for the proximity switches in the two positioning drives of the various
conveyor side positions.
This calibration of the side position will be done for width adjustment wider and smaller.
The results are saved in the TSP 301 (TSP 201) as correction values and taken into account later
when setting and measuring the conveyor width.
9.3.4.2 Calibrating the Conveyor Width
The conveyor width offset can be determined by using a board with a width of your choice. This width
must be entered by the operator. This ensures that a consistent predefined tolerance (offset) is used
between the conveyor sides, for the various different conveyor widths, thus preventing the boards from
getting jammed.
9.3.4.3 PCB Reference Corner
X Select gantry 1 or 2.
X Select PCB reference corner position right or PCB reference corner position left (dual conveyor)
X Moves the active gantry with the PCB camera over the reference corner position and switches the
screen display to the PCB camera for checking purposes. The reference corner position is visible in
the camera's field of view. Teach the gantry at the top right edge of the board, so that the PCB
reference corner is in the center of the camera's Field of view.
X This PCB reference corner determines the position coordinates for the PCB position fiducial search
in the machine.
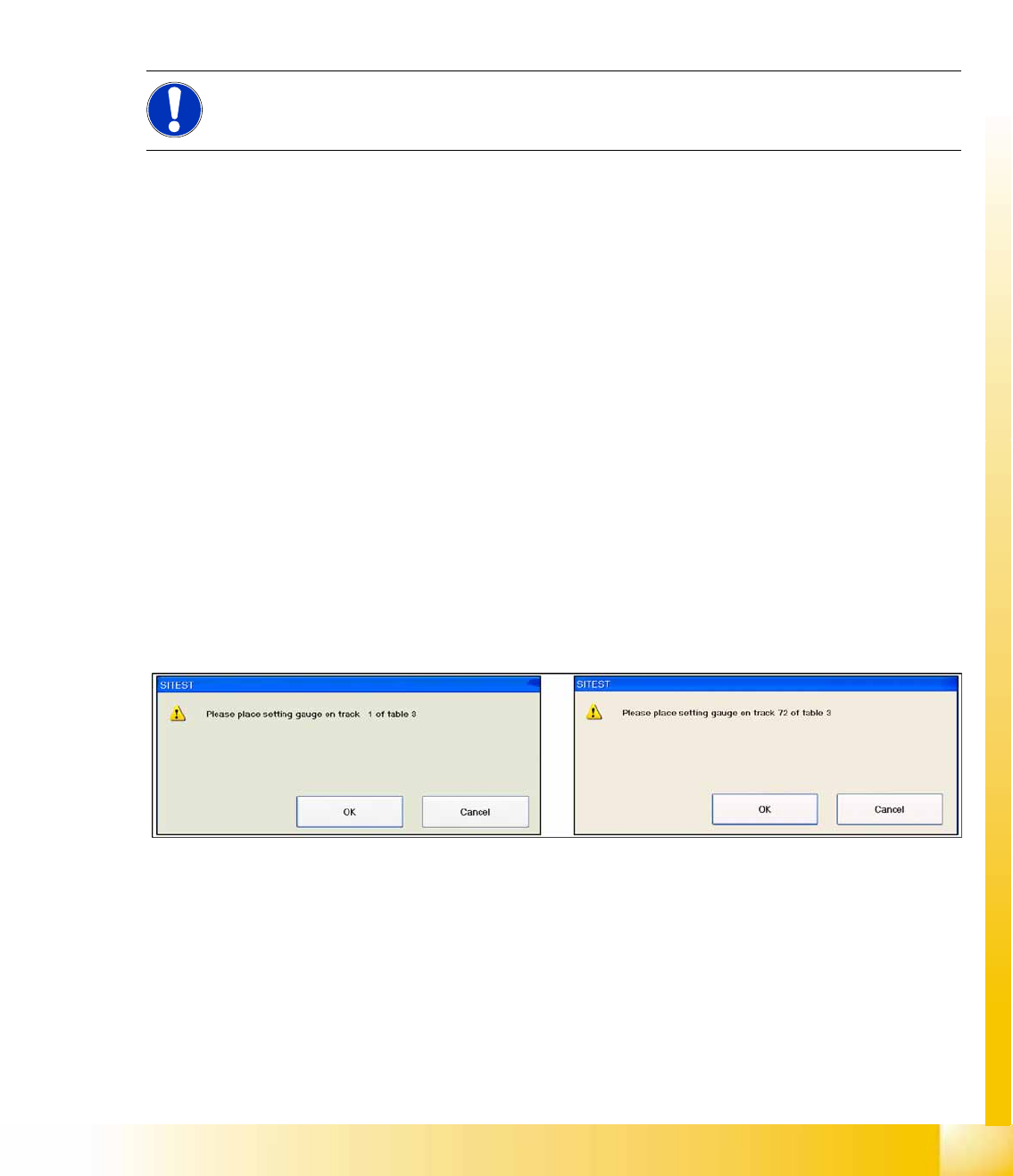
9.3.4.4 Pickup Position (Calibrating the Changeover Table)
This calibration step determines the X and Y positions for the changeover tables which, depending on
the type, will be tracks 1-72 or 1-90 or which, depending on the configuration, can be 1-90 (without WPC)
or 61-90 (with WPC). A connected and activated WPC is automatically recognized by the software.
9-6: Calibrate the changeover table
NOTE:
Calibration needs to be performed for lanes 1 and 2.
SITEST
Calibration Basics PCB Mapping
Student Guide Advanced Level 1 SIPLACE D-Series
SITEST EN 05/2007
9-14
9.3.5 PCB Mapping
With the PCB mapping the linearity of the X- and Y-guidance for PCB-camera movement is measured
in the placement area. The PCB-camera center the cross fiducials on a high precise glass plate. This
mapping plate has been measured with a measuring device and the dimensions are taken into account
during the mapping procedure.
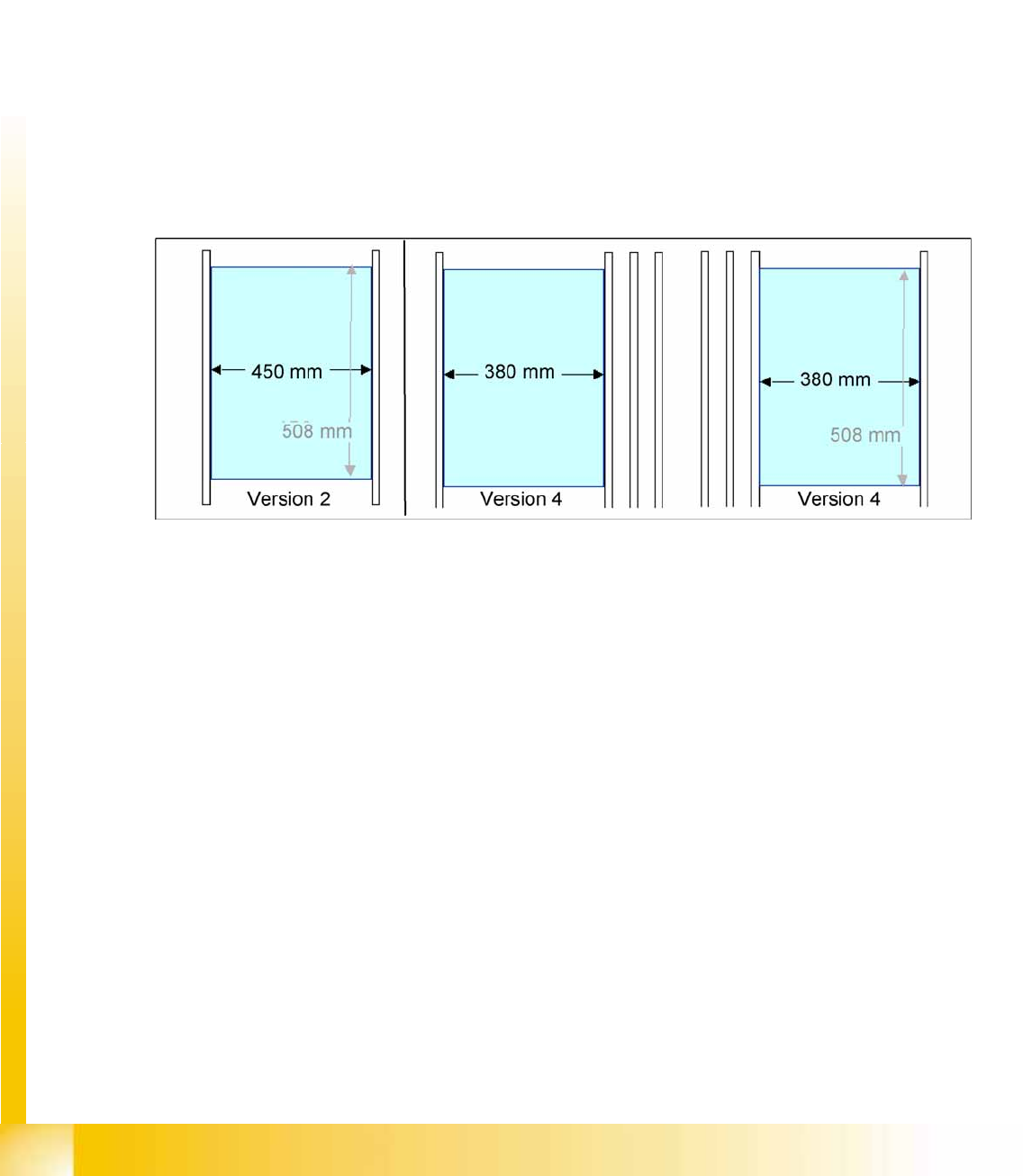
9.3.5.1 Preparation for Mapping
X At the single conveyor the SITEST move the transport sides to 508mm wide the mapping plate is 90
degree turned.
X At dual conveyor the SITEST SW move all the conveyor sides depend of the conveyer which is
selected the conveyor for mapping to 450 mm wide the other track to 0mm. This enables you to use
the dual conveyor as single conveyor. The Mapping must be carried out for the maximum conveyor
width.
X To prepare the board and RV mapping procedure, the SITEST SW automatically sets the conveyor
sides, so that the mapping plate fits into the relevant conveyor side.
X The C&P12 must be equipped with nozzle type 956.
X The calibration tools are in the calibration pocket.
9-7: Position mapping plate and conveyor side position for single and dual conveyor
9.3.5.2 Procedure:
X Place the mapping disk or CD-ROM in the station computer and copy the measurement data for this
mapping plate.
X Put the mapping plate in the input conveyor for placement area 1 or in the intermediate conveyor for
placement area 2.
X Now appears the teach menu to teach the fixed PCB corner OK.
X PCB mapping is running.
X Then the gantry axes move the camera up to the start position. The light-colored fiducial cross will
now be centered with the help of a synthetic image.
X This results are set for the nominal coordinates. 40.000 µm in X- respectively Y- direction added for
the next fiducial nominal position.
X The deviation of the structure to this theoretical position is measured.