D-serie level 1 EN.pdf - 第170页
SIPLACE Vision Optical Fiducial Models Fiducial Shapes For PC B Position and Placement Position Recognition S tuden t Guide Advanced Level 1 SIPLACE D-Series SIPLACE Vision EN 05/2007 10-4 10.1.2.1 Synthetic Fiducials …
SIPLACE Vision
Fiducial Shapes For PCB Position and Placement Position Recognition Optical Fiducial Models
Student Guide Advanced Level 1 SIPLACE D-Series
EN 05/2007 SIPLACE Vision
10-3
The maximum size of the fiducial is generally 3 mm and the maximum line thickness for cross 1.5 mm,
for double cross 1.2 mm. The minimum possible tolerance is 2%, the maximum possible tolerance is
20% of the nominal size.
The fiducials now only contain the data required for optical recognition. The size of the search field and
the fiducial application are assigned to the fiducial coordinates.
The following measurement results are issued for the structure found:
Rectangle or square
(square is a special type of rectangle)
0.25 mm long/
wide
Shape, dimensions; can be shown as light or dark
The square is a special type of rectangle in which both
sides are to be set identically.
Rectangle frame / square ring (square
ring is a special type of rectangle
frame)
0.3 mm long,
0.1 mm thick
Shape, dimensions and line thickness; can be shown as
light or dark
The square ring is a special type of rectangular ring in
which both sides are to be set identically.
Diamond – a square rotated by 45° 0.35 mm long/
wide
Shape, dimensions; can be shown as light or dark
Patterns of other 2D fiducial shapes
(triangle, quarter circle segment, PCB
circuit structure etc.)
0.3 mm long,
0.1 mm thick
Pattern recognition algorithm, the fiducial is marked as 2
D fiducial in the fiducial list.
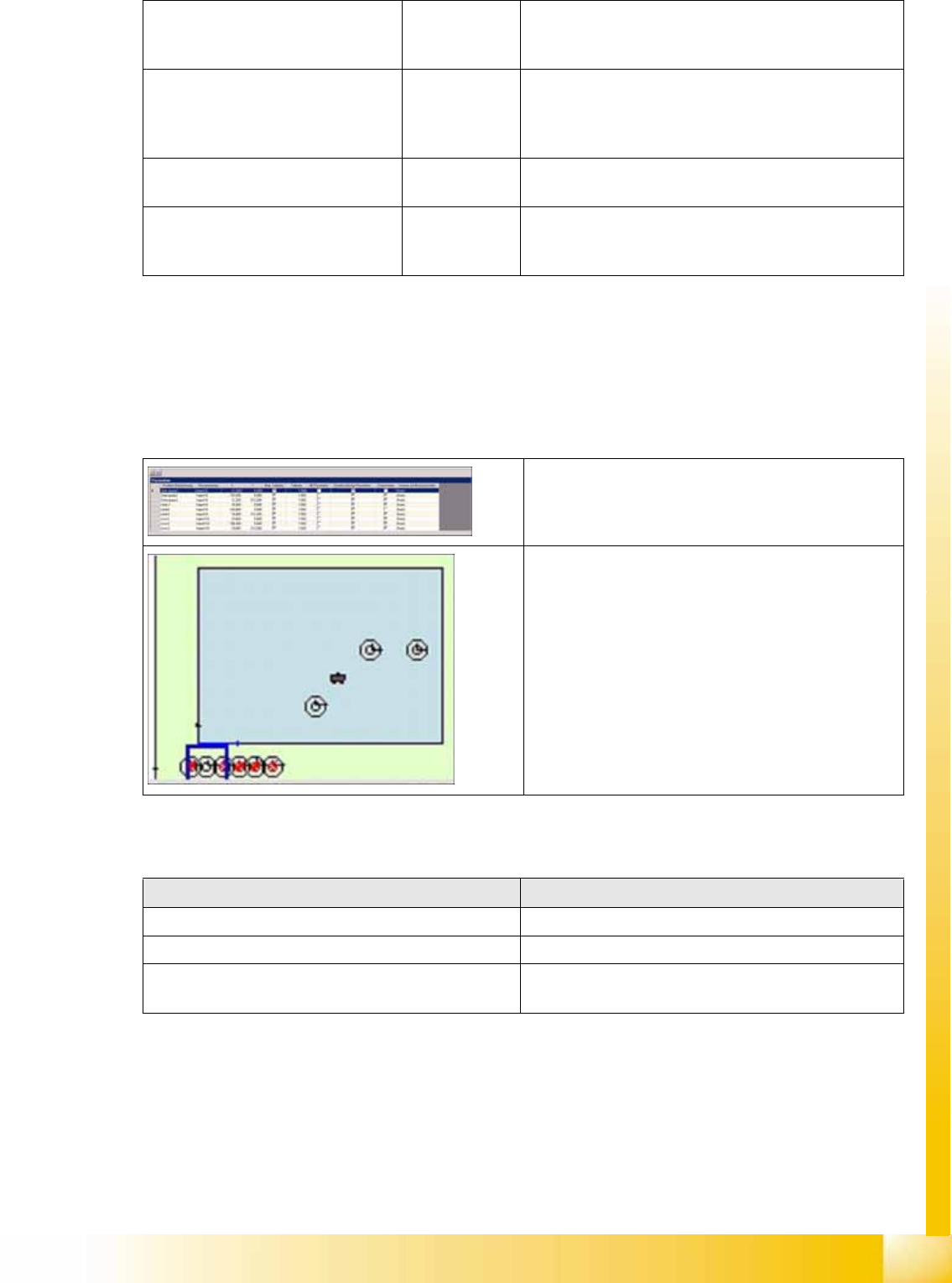
Fig. Programming field Fiducials
Fig. PCB section
When teaching the fiducial: When centering the fiducial:
=> X position of structure to camera center point => X position of structure to camera center point
=> Y position of structure to camera center point => Y position of structure to camera center point
=> Angle deviation of structure to PCB camera
coordinate system
SIPLACE Vision
Optical Fiducial Models Fiducial Shapes For PCB Position and Placement Position Recognition
Student Guide Advanced Level 1 SIPLACE D-Series
SIPLACE Vision EN 05/2007
10-4
10.1.2.1 Synthetic Fiducials
In a rough step with reduced resolution, the gray value difference between two points is determined
for multiple pairs of points. The position of these points is calculated using the geometric model. The
gray value differences are then used to determine a position.
In a fine step, the highest gray value difference in each case is measured along the scan lines.These
positions are used to calculate regression lines for determining the fiducial positions.The positions
of the scan lines are determined using the positions of the pairs of points from the rough step. Parallel
to position determination, a quality value is calculated, which indicates how well the image and model
match one another at the positions found.
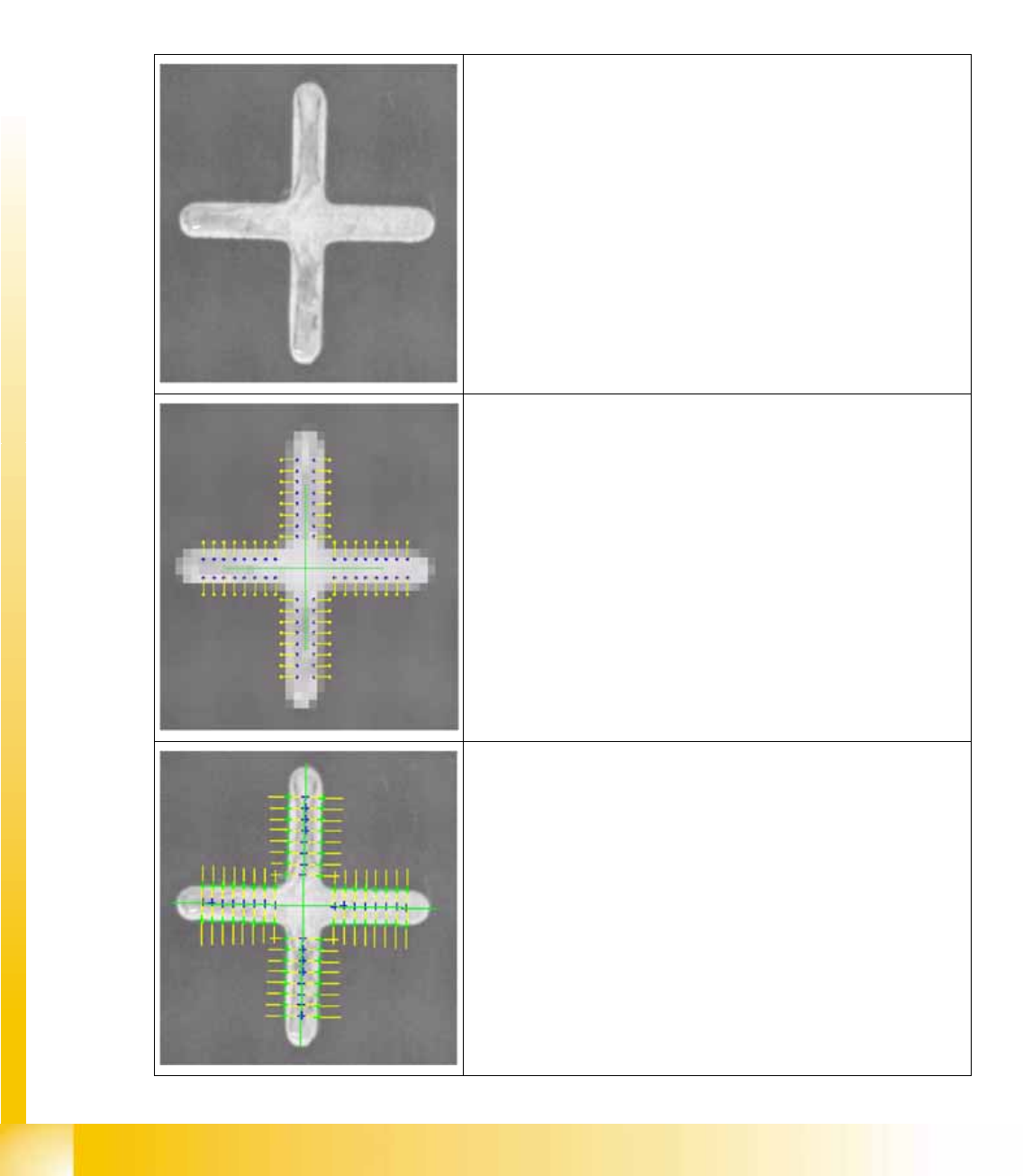
Fiducial camera image
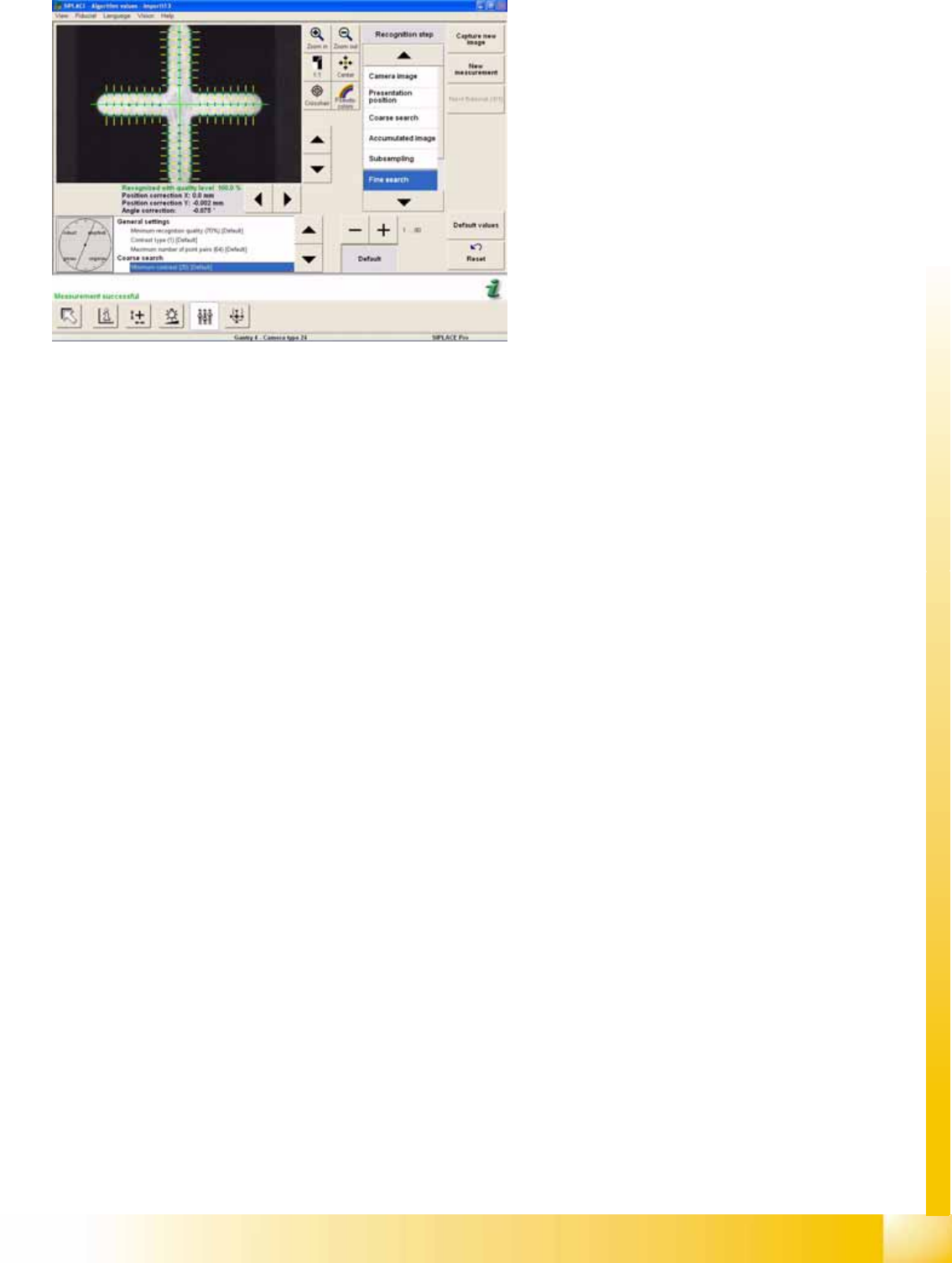
Rough search with reduced resolution:
Pairs of points are yellow/blue.
The blue point has a higher gray value than the yellow point.
Fine search:
Position of scan lines (yellow) for the pairs of points found.
Green cross: positions found for the highest gray value gradients
along the scan line.
Green lines: regression lines.
SIPLACE Vision
Fiducial Shapes For PCB Position and Placement Position Recognition Optical Fiducial Models
Student Guide Advanced Level 1 SIPLACE D-Series
EN 05/2007 SIPLACE Vision
10-5
This procedure can also be used for inkspot recognition. Bad quality is recognized if the quality value at
the point found falls below a certain threshold.
10.1.2.2 Patterns as Fiducials
Learning fiducial shapes as patterns with the help of an automated algorithm:
You need to define the search field, the so-called Region Of Interest (ROI).
The reference point of this pattern also needs to be calculated (recommended) or manually
determined (manual definition is less exact). The reference point is the point which the placement
process will later relate to.
The pattern is calculated in order to determine the reference point.
Test the pattern with several other fiducials to establish its reliability (stability of measurement
results).
For reasons of accuracy, the reference points should be determined automatically and then checked
manually.
10-1: SC synthetic fiducials, edge position quality 01 0605
The edge position quality for the fine search is set
to 2 as a default.
You can adjust to 1 for very good fiducial edges
and to 4 for very bad ones.A setting of 5 means
that edge deviation checks will no longer be
performed.
For good edge quality 1, the marker is set to
Sensitive against noise or Exact edge position.
For edge quality 5, the marker points to Robust
against edge noiseinaccurate. Greater edge
position deviations are permitted (this more robust
edge position measuring procedure is used for
hot-galvanized fiducials, for example).