1OM-1003-007.pdf - 第93页
2.4.5 Placement Head Section Fig. 1A25 The machine is provided with a rotary turret that has several heads. Each head is rotated by a direct-drive motor and several vacuum nozzles can be attached to one head. The attache…
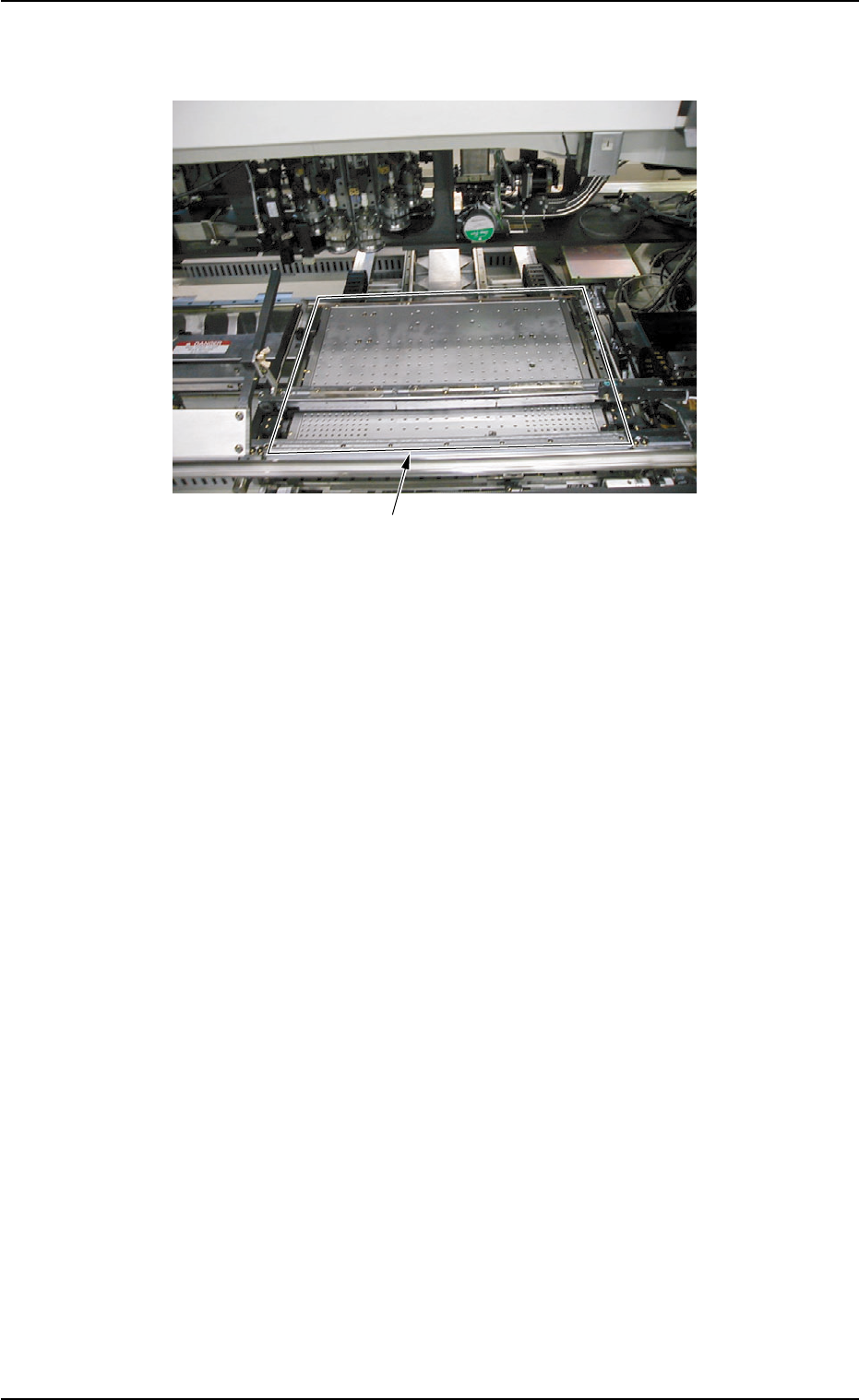
2.4.4 X/Y Table Section
Fig. 1A24
The X/Y table section is provided with a mechanism that holds a P.C.B.
(sent from the conveyor on the input side) firmly on the X/Y table.
The firmly-held P.C.B. moves and stops under the placement heads
together with the X/Y table according to the pattern program data. Com-
ponents are placed on the P.C.B. there.
It is required to adjust the positioning pin, the positioning lever, and the
movable chute to firmly hold the P.C.B. (P.C.B. positioning).
2.4 Main Units
X/Y Table
0305-001 1-29 AIL01EOPP
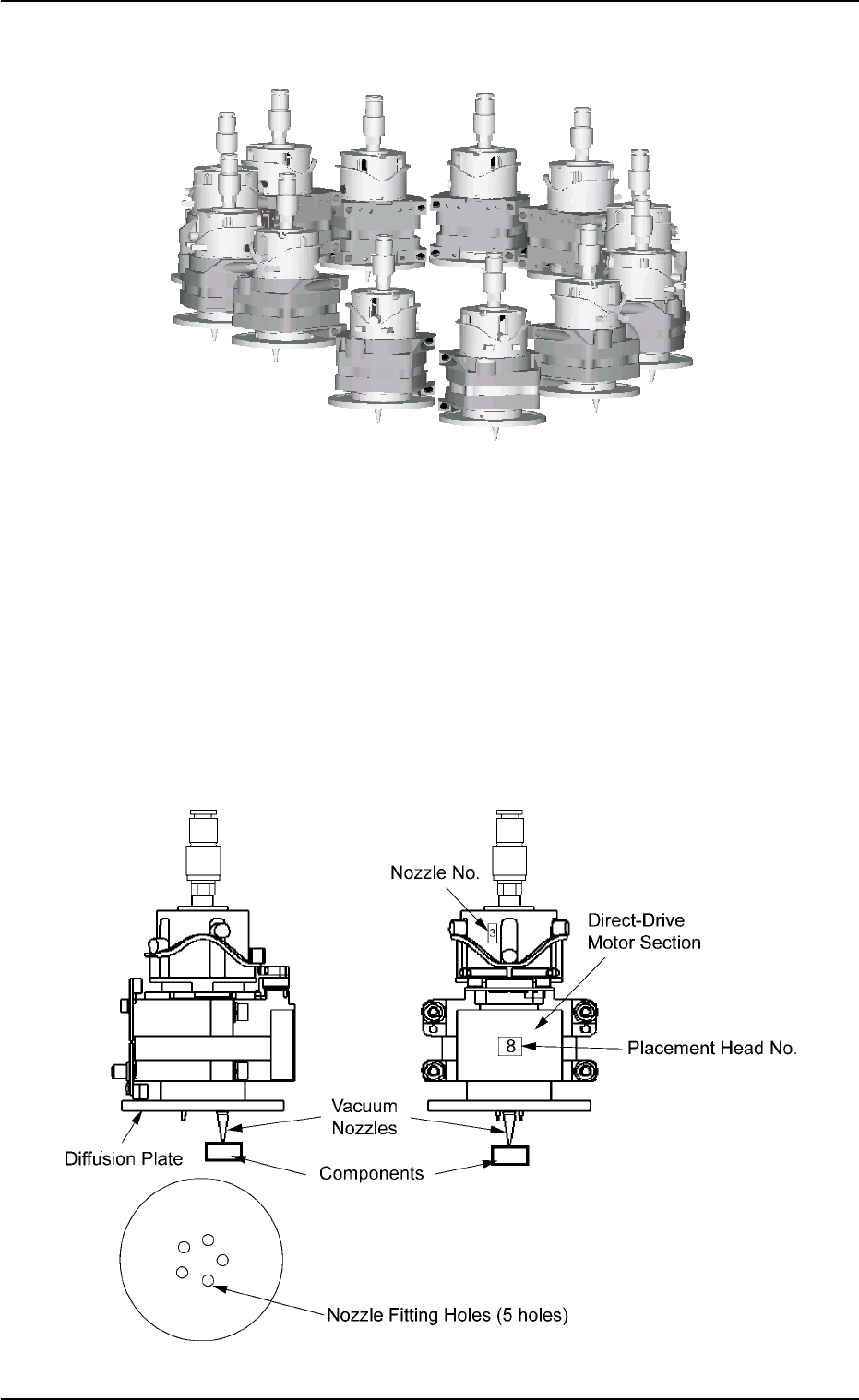
2.4.5 Placement Head Section
Fig. 1A25
The machine is provided with a rotary turret that has several heads.
Each head is rotated by a direct-drive motor and several vacuum nozzles
can be attached to one head. The attached vacuum nozzles are used to
pick up components and place them on a P.C.B.
The turret has 12 placement heads.
Each head has 5 fitting holes for nozzles. Up to 5 types of vacuum
nozzles can be attached to each head.
Fig. 1A26
2.4 Main Units
0305-001 1-30 AIL01EOPP

2.4.6 Component Recognition Section
Fig. 1A27
The machine is provided with a mechanism that inspects (recognizes)
the components picked up by vacuum nozzles, using two component
recognition cameras and three light sources.
The following three operations are performed in the compo-
nent recognition system.
• Component Detection
• Component Inspection based on Component Library Data
• Measurement of Positional and Angular Deviations
2.4 Main Units
0309-002 1-31 AIL01EOPP
Component Recognition Scope Section
Note