1OM-1003-007.pdf - 第95页
2.4.7 P .E.C. Recognition Section Fig. 1A28 The P .E.C. recognition camera is used to detect the fiducial marks on a P .C.B. and the amount of the positional deviation from the fiducial mark coordinate data is calculated…

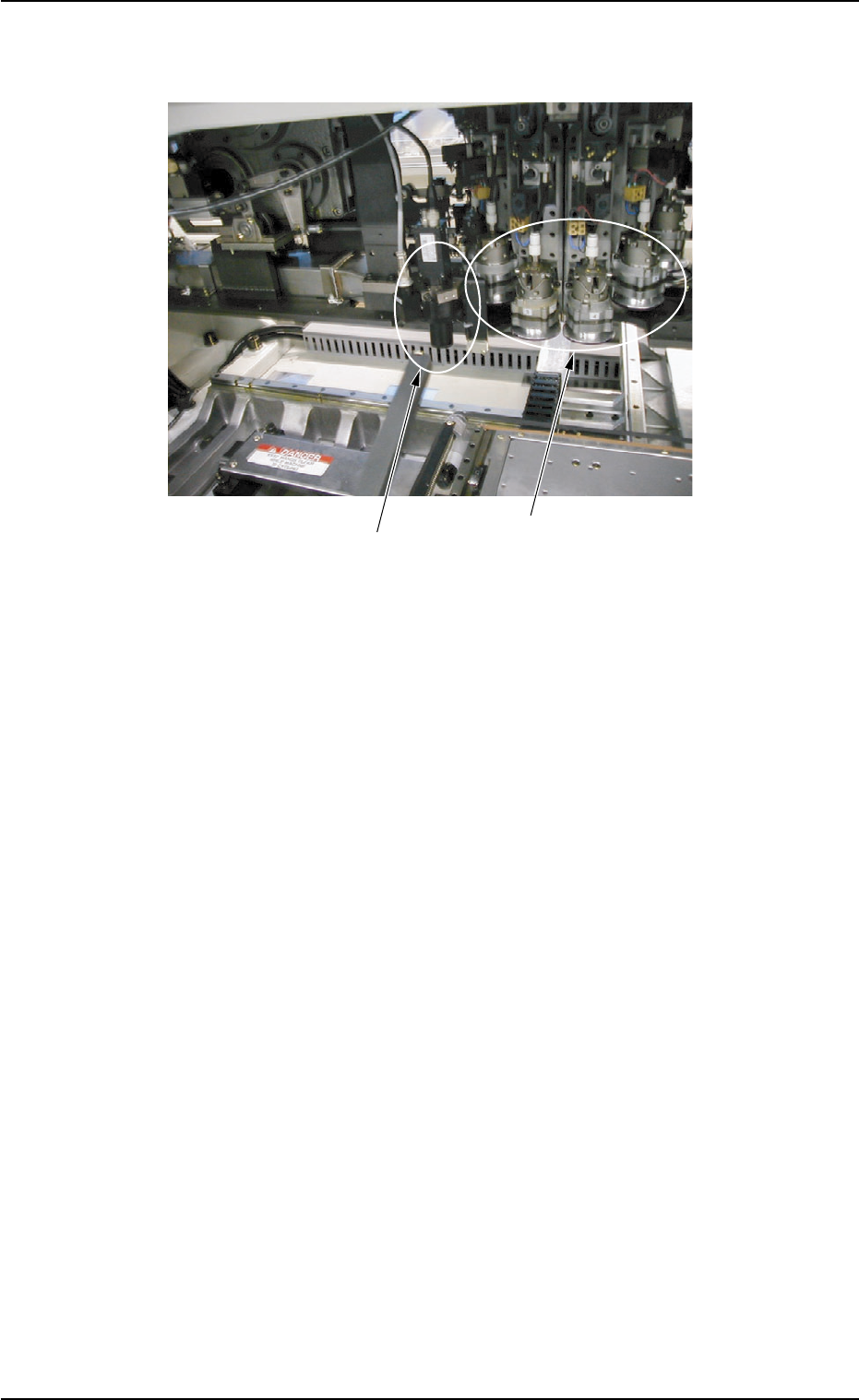
2.4.6 Component Recognition Section
Fig. 1A27
The machine is provided with a mechanism that inspects (recognizes)
the components picked up by vacuum nozzles, using two component
recognition cameras and three light sources.
The following three operations are performed in the compo-
nent recognition system.
• Component Detection
• Component Inspection based on Component Library Data
• Measurement of Positional and Angular Deviations
2.4 Main Units
0309-002 1-31 AIL01EOPP
Component Recognition Scope Section
Note
2.4.7 P.E.C. Recognition Section
Fig. 1A28
The P.E.C. recognition camera is used to detect the fiducial marks on a
P.C.B. and the amount of the positional deviation from the fiducial mark
coordinate data is calculated to automatically correct the position of a
placed component.
2.4 Main Units
0305-001 1-32 AIL01EOPP
P.E.C. Recognition Camera
Rotary Turret
3. Surface Mounting Mechanism
The following briefly describes how components are mounted on P.C.B.’s.
(a) The explanation is based on the P.C.B. flow direction "From
Left to Right (L Æ R)".
(b) Refer to "1. Scope of Actions" in "Section 2" of "Volume 2:
Operation (Supervisor)" for details.
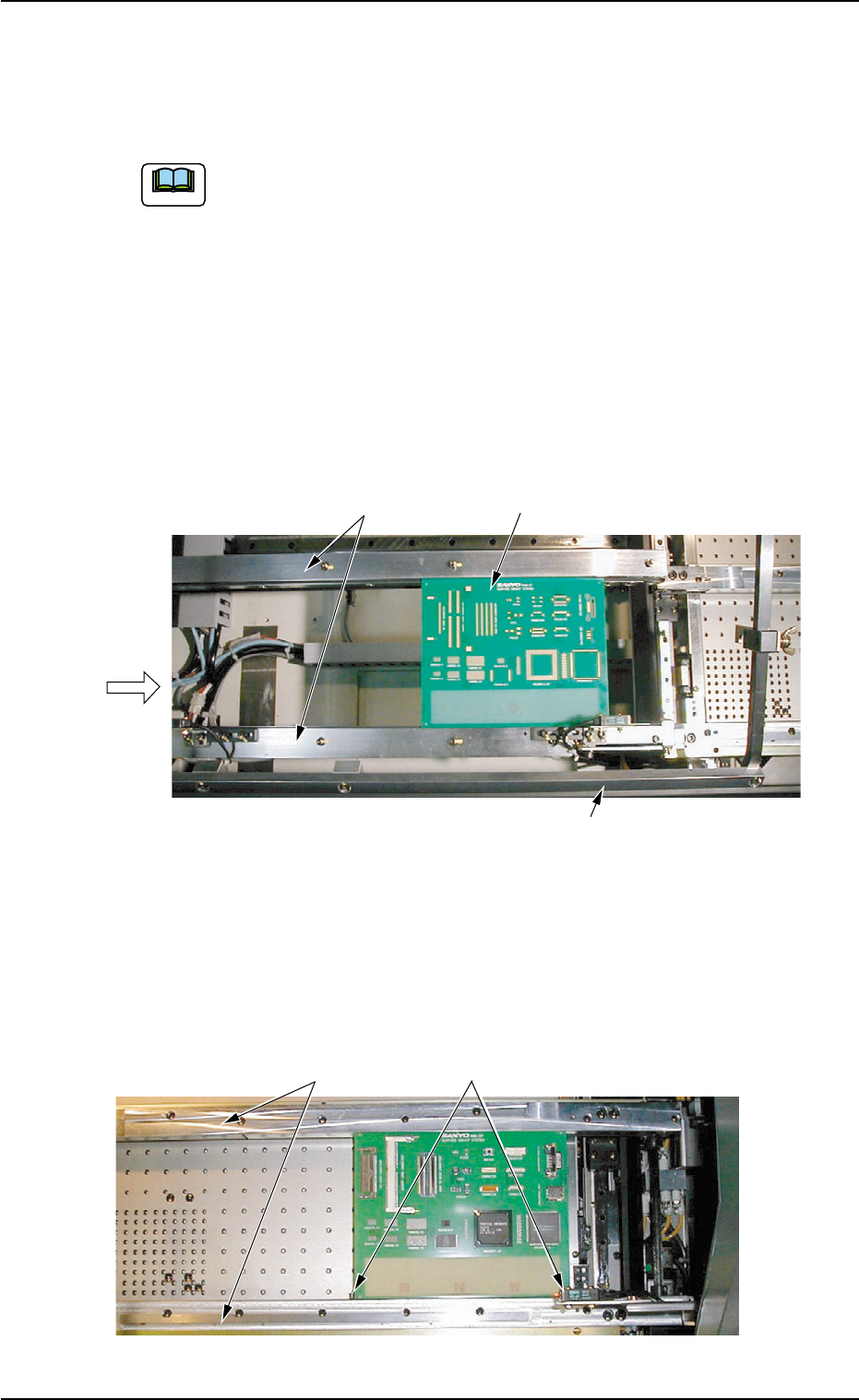
3.1 P.C.B. Transfer and Positioning
P.C.B. Transfer (from the input machine)
The P.C.B. transferred from the input machine is carried to the P.C.B.
transfer section by the L conveyor and stops there.
Fig. 1A29
P.C.B. Positioning
The P.C.B. transferred from the P.C.B. transfer section to the X/Y
table is secured in place by the chutes, the P.C.B. pilot pins, etc., on
the table.
Fig. 1A30 X/Y Table Section
3. Surface Mounting Mechanism
0305-001 1-33 AIL01EOPP
L Conveyors
P.C.B.
P.C.B. Transfer Section
Input Machine
Chutes
P.C.B. Pilot Pins
Note