KD-2077_使用说明书.pdf - 第299页
第 1 部 基本篇 第 4 章 制作生产程序 4 - 93 1) 设置条件 从菜单栏中选择 「 机器操作 」 / 「 确认 」 / 「 坐标类 」 / 「点胶位置」 ,显示如 下画面。 图 4-5 -4-2-3 -1 点胶坐 标 位置 摄 像机跟踪 ① 传送方法 (1) 自动传送 以一定的间 隔, 依次 使用 摄 像机捕 获点胶的位置。 仅在以 下的 「自动传送间 隔」 中设定 的时间中停止, 经过该时间 后移动 到下一点。 ● 自动传…
第 1 部 基本篇 第 4 章 制作生产程序
4
-
92
4-5-4-2-3 坐标类:点胶位置
通过摄像机跟踪点胶位置。确认监视器中显示的点胶位置,当输入坐标不准确时,可通过示教
进行修正。
<
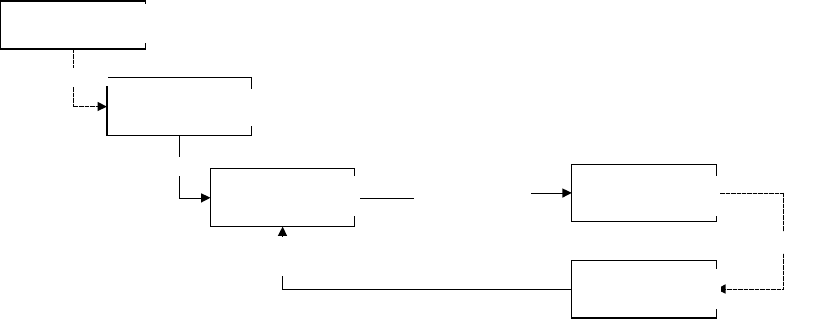
点胶位置跟踪的流程
>
マシン操作メニュー
塗布位置
塗布位置カメラ追尾
の条件設定
塗布位置カメラ追尾
実行
モニターにて座標を
目視
HODによるティー
チング
各座標の修正を反
映
各座標の修正
選択
各塗布
データ座標へ移動
実行
机器操作菜单
点胶位置
选择
设置点胶位置摄像机
跟踪的条件
执行
执行点胶位置
摄像机跟踪
反映各坐标的
修正
向各点胶
数据坐标移动
用监视器目视检查
坐标
用 HOD 进行
示教
各坐标的修正
第 1 部 基本篇 第 4 章 制作生产程序
4
-
93
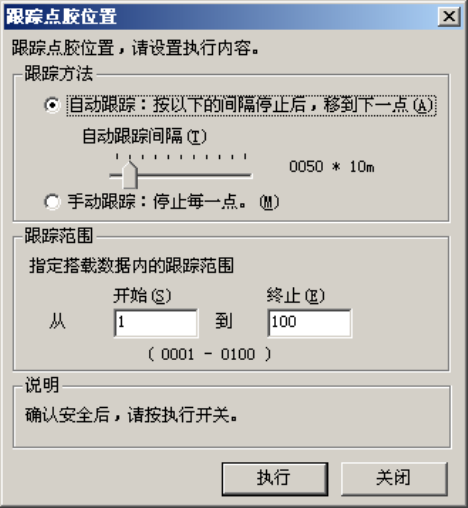
1) 设置条件
从菜单栏中选择「机器操作」/「确认」/「坐标类」/「点胶位置」,显示如下画面。
图 4-5-4-2-3-1 点胶坐标位置摄像机跟踪
①
传送方法
(1)自动传送
以一定的间隔,依次使用摄像机捕获点胶的位置。仅在以下的「自动传送间隔」中设定
的时间中停止,经过该时间后移动到下一点。
●
自动传送间隔:
调整停止间隔。设定范围为 0.01 秒~5 秒。
(2)
手动传送
按 HOD 的[NEXT]键或<开始>开关,移动到下一点。
②跟踪
范围
将点胶
数据的第几点到第几号作为跟踪范围的进行输入。初始设定为对所有点胶点进行跟
踪。
设定所
有的跟踪条件,准备结束后按<开始>开关或者「执行」。
按下「关闭」,返回前一画面。
第 1 部 基本篇 第 4 章 制作生产程序
4
-
94
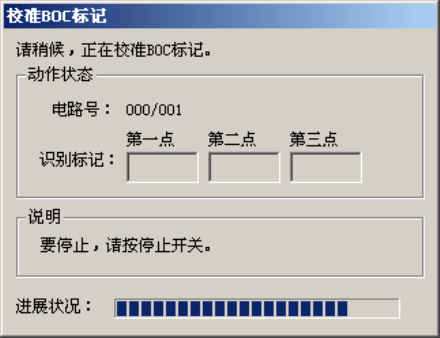
2)校准 BOC 标记
执行后如果是设置有 BOC 标记的生产程序,为提高点胶位置的精度,进行 BOC 校准。(识别所
有电路的 BOC)
图 4-5-4-2-3-2 正在校准 BOC 标记