KD-2077_使用说明书.pdf - 第416页
第 2 部 功能详解篇 第 8 章 手动控制 8 - 19 8-4-2-2 自动控制传送 从菜 单栏 中选择 「控制( C )」 / 「传 送( C )」 / 「自动控制 传送 (A) 」, 则显 示如下的自 动 控制传送画面。 图 8- 4-2-2-1 自动 控制 传送 (1) 控制项目 用按钮来 选择控制 项目。 (2) 定位方式 用按钮来 选择定位方式。 ◆在控制项目中 选中 “初始化” 、 “基板搬出” 、 “解 除基板固定 ”…
第 2 部 功能详解篇 第 8 章 手动控制
8
-
18
8-4-2 传送
传送有“个别控制”、“自动控 制 ”、“ 自 动调整基板宽度控制”。
图 8-4-2 传送菜单
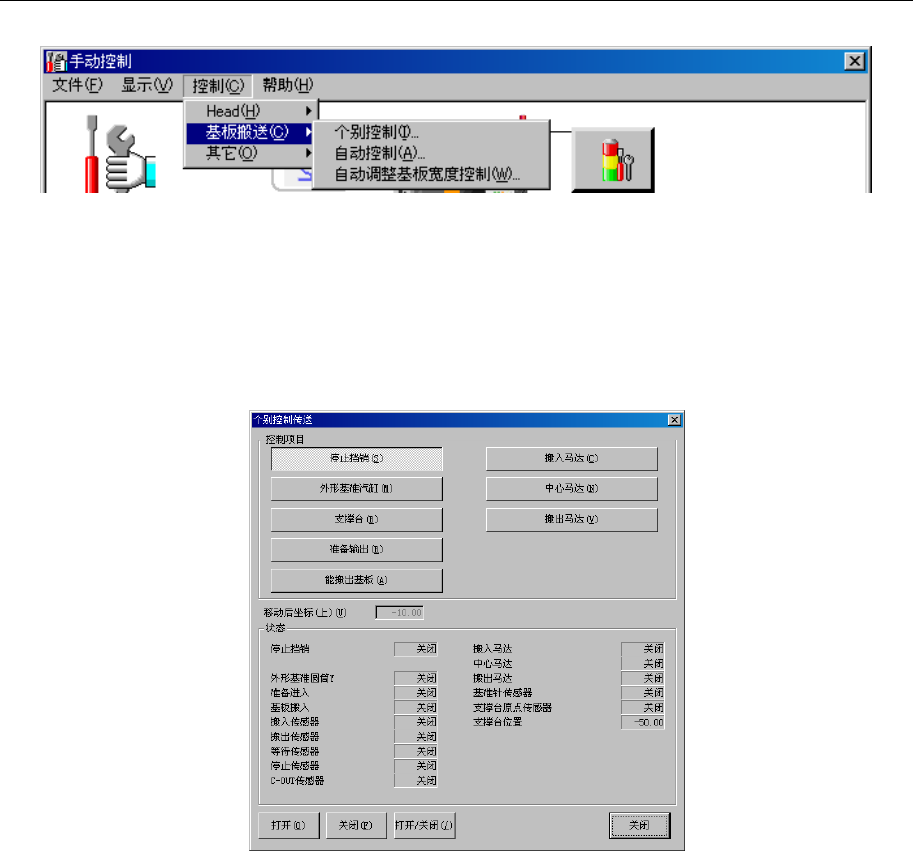
8-4-2-1 个别控制传送
从菜单栏中选择「控制」/「传送」/「个别控制传送(I) 」,或者选择命令按钮「个别控制」,
则显示如下的个别控制传送画面。
图 8-4-2-1-1 个别控制传送画面
(1) 控制项目
按下按钮,选择控制项目。
(2) 控制按钮
按动控制按钮,执行控制项目。控制按钮的显示因控制项目而异。
选择要控制的项目,选择<打开(O)>按钮、<关闭(F) >按钮、<打开/关闭(/)>按钮或按下
[F3]键、[F4]键、[F5]键进行控制。选中支撑台时,按 <上( U)>、<下(D) >、 <上/下( /)>
按钮进行控制。
用<正转>、<反转>按钮可变更传送马达的旋转方向。
(3) 状态显示
控制结束时显示各传感器、各单元的状态。
连续显示各传感器、各信号、各单元的状态。
第 2 部 功能详解篇 第 8 章 手动控制
8
-
19
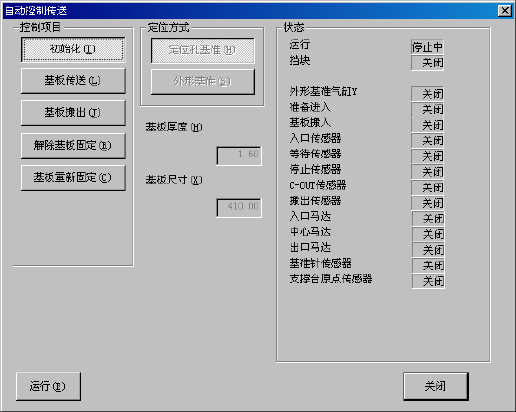
8-4-2-2 自动控制传送
从菜单栏中选择「控制(C)」/「传送(C)」/「自动控制传送(A) 」,则显示如下的自动
控制传送画面。
图 8-4-2-2-1 自动控制传送
(1) 控制项目
用按钮来选择控制项目。
(2)
定位方式
用按钮来选择定位方式。
◆在控制项目中选中“初始化”、“基板搬出”、“解除基板固定”、“基板等待传感器/搬出传感
器检查”时,不能进行设置。
(3) 控制按钮
用控制按钮来执行控制项目。
选择控制项目后,按<执行(E) >按钮或按下[F3]键进行控制。
1) 初始化
将基板传送初始化。
2) 基板搬入
根据定位方式中所指定的方式搬入基板。
3) 基板搬出
将基板搬出。
4) 基板固定解除
解除基板的固定。
5) 重新夹紧基板
按定位方式指定的方式,重夹传送通道上的基板。
(4) 状态显示
连续显示动作状态、各传感器、各信号、各单元的状态。
第 2 部 功能详解篇 第 8 章 手动控制
8
-
20
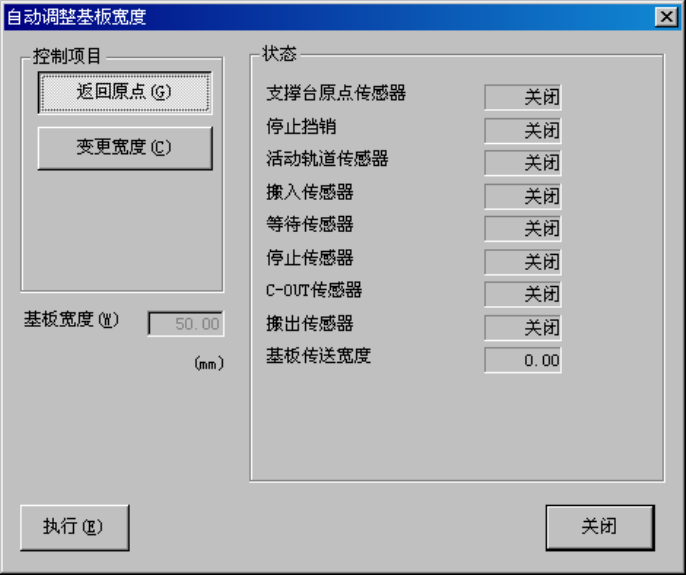
8-4-2-3 自动调整基板宽度控制
从菜单栏中选择「控制」/「传送系统」/「自动调整基板宽度」,或者选择命令按钮「自动
调整基板宽度」,则显示如下的自动基板宽度调整控制画面。
图 8-4-2-3-1 自动调整基板宽度控制画面
(1) 控制项目
用按钮来选择控制项目。
(2) 控制按钮
用控制按钮来执行控制项目。
选择控制项目,选择<执行(E)>按钮或按下[F3]键来进行控制。
1) 返回原点
将自动基板宽度调整进行返回原点。
2) 宽度变更
变更传送的宽度。
(3) 状态显示
连续显示各传感器、各单元的状态。