5OM-1602-004_w.pdf - 第137页
5OM-1602 4-20 0910-001D(M914WC---0001) Y 轴 (R) 马达电路图 1 2 3 4 5 6 7 8 9 10 1 1 12 A B C D E F G H -X12301 :A3 :A2 -X2300 :A1 -M23 :1 :2 :3 :4 -X12201 :A3 :A2 -X2200 :A1 :1 -M22 :2 :3 Y Beam (Rear) T o U94 (Counter Board) …
5OM-1602
4-19
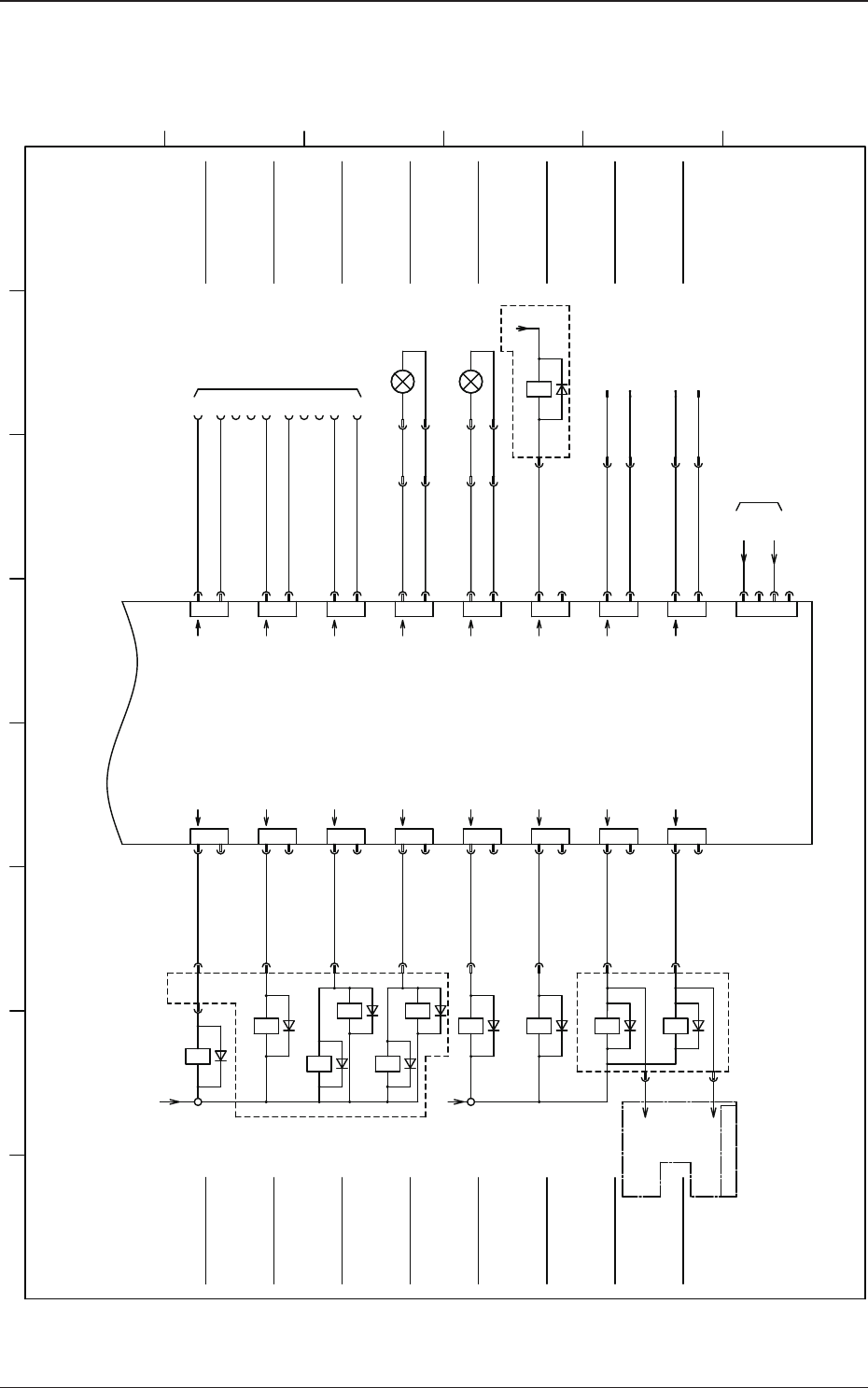
1201-004G(M914WBL--0004)
U12 I/O PCB STLT PWR 2/2
1 2 3 4 5 6 7 8
A
B
C
D
E
F
2
1
2
1
CN38CN30
CN39CN31
CN40CN32
CN41CN33
CN34
CN35
CN42
CN43
24V(A)
:A10
X2761
542
K25
15
:B10
X2761
543
K43
121
:A11
X2761
544
K65A
16
:B11
X2761
545
:1
X11234
546
K75
A2A1
:A12
X2761
548
K71
18
24A1
U12
1
CN4
X1204
2
10A
24A1
X1230
X1239
X1231
X1240
X1232
X1241
X1233
X1242
X1234
X1243
X1235
24A3
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
U27
:2
X11234
547
K77
A2A1
:B12
X2761
549
K72
CN36
CN37
CN44
CN45
X1236
X1237
550
24A1
551
24A1
552
24A1
X1238
553
24A1
3
4
:A13
X2761
555
K22
16 15
24A1
U27
24A1
:2
X27163
K65B
121
K66A
16
K66B
121
U27
DS135
DS135
554
[B-/02/5A]
[B-/02/5B]
18
:3
X27163
:4
X27163
U08(STLT CNVR:L)
X0826:2
U14(STLT CNVR:R)
X1426:2
X1244
X1245
556
557
X195-9
X195-12
X196-9
X196-12
SCK-2512
SCK-2512
H112F
H112B
:5
X9602
:6
:9
:10
:1
:2
[LF/06/1C]
:7
X1195
:10
X1195
:7
X1196
:10
X1196
I/O P.C.B
STLT_PWR
(Power Control)
(UB32)
+
-
+
-
:3
:4
:7
:8
N.C
N.C
N.C
N.C
24A1
24A1
24V(A)
Do00
24V(A)
Do01
24V(A)
Do02
24V(A)
Do03
24V(A)
Do04
24V(A)
Do05
24V(A)
Do06
24V(A)
Do07
Do08
24V(A)
Do09
24V(A)
Do10
24V(A)
Do11
24V(A)
Do12
24V(A)
Do13
24V(A)
Do14
24V(A)
Do15
:3
X:S112
:4
:3
:4
X:S112
:3
X:S112F
:4
:3
:4
X:S112B
DC Load Power Supply Control
Main Power Supply Shut-down
Feeder (1) Power Supply
Feeder (2) Power Supply
Coplanarity Measurement Start
(Rear)
Power for Output
[B-/02/5A]
Feeder Base (1)
Power Supply
Feeder Base (2)
Power Supply
Multi Layer Tray Power Supply
Shuttle Conveyor
PCB Stopper (L)
Shuttle Conveyor
PCB Stopper (R)
SL-SRS or DL-SRS
Safety Door Lock (Front)
Safety Door Lock (Rear)
STAGE READY LED (Front)
U96:CN2
OP: Coplanarity
STAGE READY LED (Rear)
Coplanarity Measurement Start
(Front)
Coplanarity Power Shut-Down
OP
OP
OP
OP
OP
OP
(Coplanarity IF PCB)
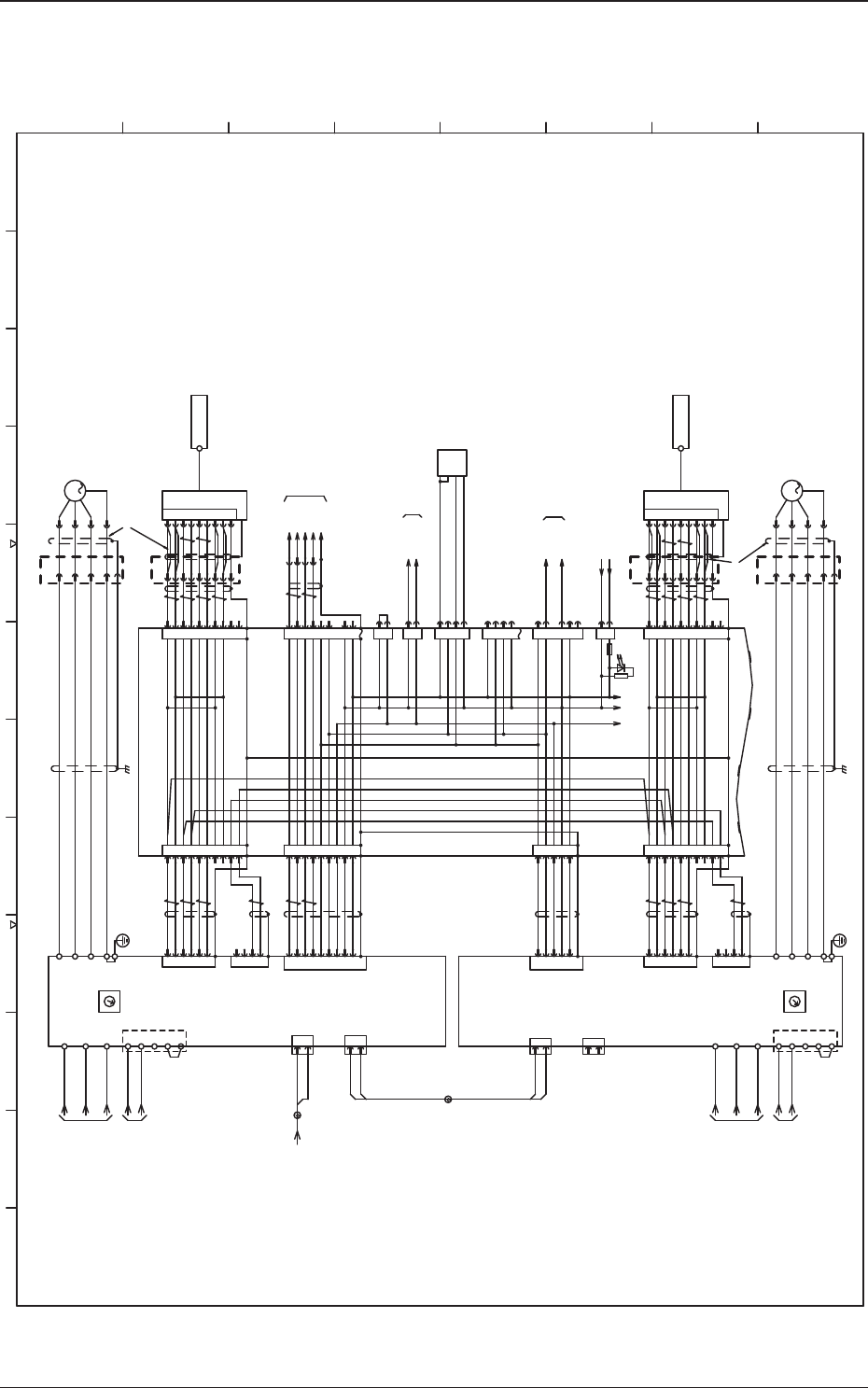
5OM-1602
4-20
0910-001D(M914WC---0001)
Y 轴 (R) 马达电路图
1
2 3 4 5 6 7 8 9 10 11 12
A
B
C
D
E
F
G
H
-X12301
:A3
:A2
-X2300
:A1
-M23
:1
:2
:3
:4
-X12201
:A3
:A2
-X2200
:A1 :1
-M22
:2
:3
Y Beam (Rear)
To U94 (Counter Board)
-B2201
-X2202L
-X2203
-X2302L
-X2303
From A21R-X211B
Robot Cable
10B
24B1
3
M
3
M
W
V
2
4
3
2
1
7
8
7
8
1
3
2
12
5
P5
LG
L2
L3
L11
L21
MRR2
MR2
LG
P5
MD2
MDR2
MD
MDR
SD
P
C
D
DOCOM
LSP
LSN
DICOM
CN2L
PE
CN3
U
L1
3F AC200V
AC200V
W
V
U
PE
CN3
3F AC200V
AC200V
LAR
LA
6
16
LBR
LB
7
17
(/Phase A)
(/Phase B)
(Phase B)
(Phase A)
CN1
:13
:5
:2
:4
:12
:10
:8
:15
:6
-X2401-X2402
-X2404-X2403
U24R
19
14
4
16
6
11
1
7
17
9 9
17
7
1
11
6
16
4
14
19
17
7
16
6
5
12
2
3
CN6
6
16
7
17
CN5
Plate
SD
CN2 CN1
3
2
12
5
SD
Plate
DICOM
LSN
LSP
DOCOM
5
12
2
3
CN7
CN3 CN4
19
14
4
16
6
11
1
7
17
99
17
7
1
11
6
16
4
14
19
:6
:15
:8
:10
:12
:4
:2
:5
:13
3
2
12
5
OUT
-
L
+
CN8
1
3
2
10
8
9
CN10
4
7
2
1
3
4
CN9
7
2
1
CN12
-X2407
-X2406
-X2405
-X2408
-X2410
-X2412
-X2409
Servo amplifier
CS1: ID Setup
1
8
7
6
5
4
3
2
1
0
F
E
D
C
B
A
9
9
A
B
C
D
E
F
0
1
2
3
4
5
6
7
8
2
CS1: ID Setup
Servo Amplifier
:4
L221
L121
L117
L217
L317
:32
:30
:29
:31
X9401
Linear Scale Head
(Converter)
Beam Relay CN Panel
Beam Relay CN Panel
Beam Relay CN Panel
-U22
-U22
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
-U23
[B-/01/11C]
[B-/01/11C]
[C-/02/1C]
[B-/01/11D]
[B-/01/11D]
[R-/03/8B]
[B-/02/5C]
Control Circuit Power Supply
Main Circuit Power Supply
Control Circuit Power Supply
Main Circuit Power Supply
-X221A
-X221B
CN1A
CN1B
L1
L2
L3
CN1A
-X231A
CN1B
-X231B
D
C
P
L21
L11
L318
L218
L118
L121
L221
Y1-Axis
-M22
A22R
A23R
Servo Motor AMP
Y1
Servo Motor AMP
Y2
Y2-Axis
-M23
U24F:CN9
-X2409:1
-X2409:3
[C-/11/6F]
SD
CN2
20
EM1
20
CN13A
1
2
CN13B
6
1
2
20
EM1
20
-X2202
2
4
3
2
1
7
8
7
8
1
P5
LG
MRR2
MR2
LG
P5
MD2
MDR2
MD
MDR
SD
SD
CN2
-X2302
CN2L
CN11:5 10B
[C-/02/4E]
X19401
:1
:2
:3
:4
SD
24B1
SSCNET3(ch1)
:B1
:B2
:B1
:B2
Beam Relay CN Panel
(UB81)
Y-Axis Limit (+)
Robot Cable
Connector Case
1
2
1
2
24B1
24B1
24B1
24B124B1
24B1
10B
10B
10B
10B
10B
10B10B
10B
-U23
Connector Case
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
Connector Case
Final Axis Cap Attachment
-X2413B
-X2413A
-X2413A:1
-X2413A:2
[C-/11/8D]
U24F:CN13A
440
10B
1
2 3 4 5 6 7 8 9 10 11 12
A
B
C
D
E
F
G
H
Linear Scale Head
(Converter)
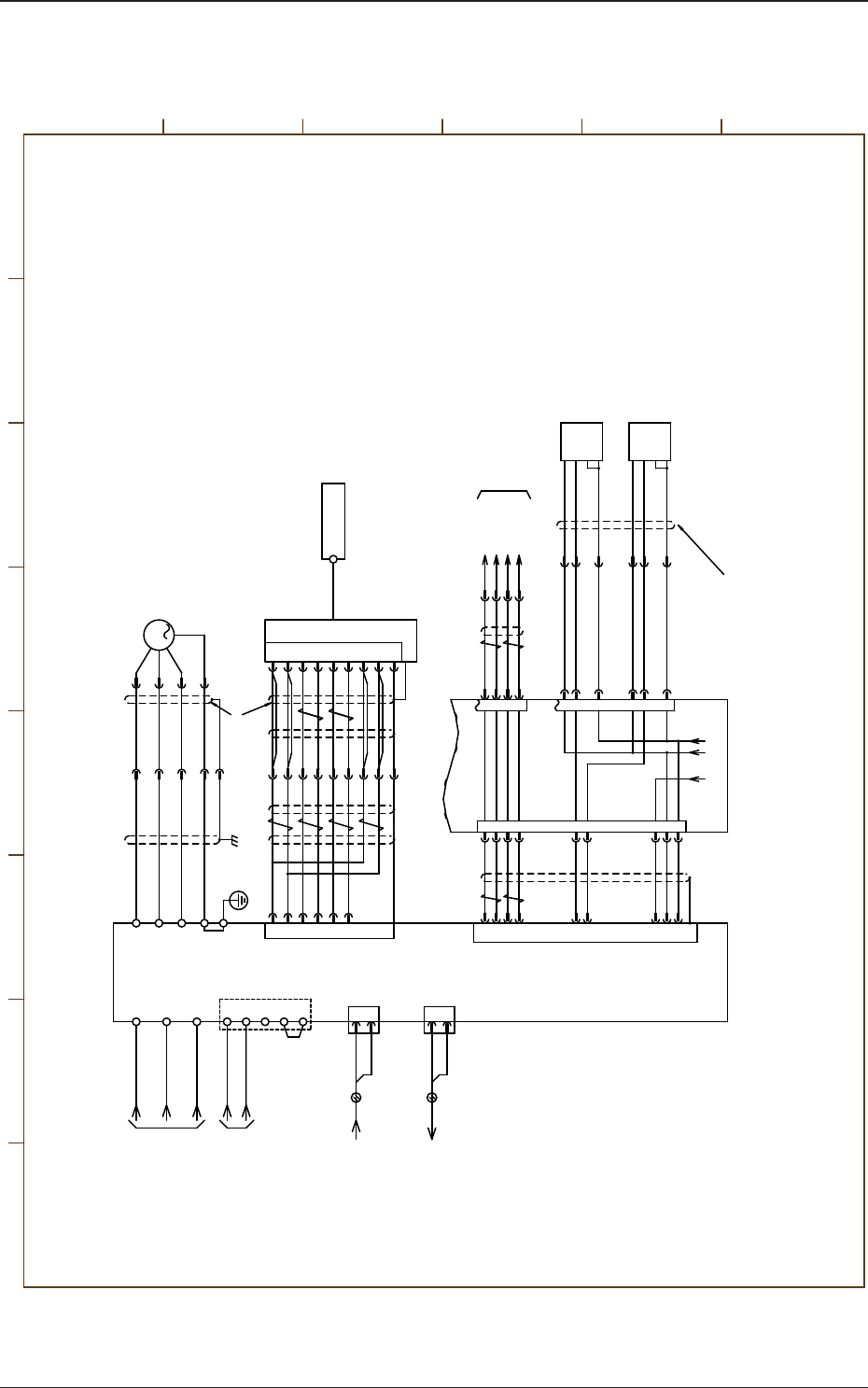
5OM-1602
4-21
0910-001B(M914WC---0002)
X 轴 (R) 马达电路图
3
M
:A1
-X2100
:A2
:A3 :3
:4
:2
-M21
:1
-X2102L
W
V
L2
L3
CN2L
PE
PE
UL1
3FAC200V
AC200V
CN10
-X2410
10B 24B1
U24R
D
C
P
L21
L11
L221
L121
L316
L216
L116
OUT
-
+
-B2101
:2
-X12410
:3
:1
:4
:6
:5
-X12102
-U21
[B-/01/11B]
[B-/01/11B]
L
OUT
-
+
-B2102
L
X-Axis
-M21
A21R
Servo Motor AMP
X
-X211A
-X211B
CN1A
CN1B
[C-/01/2C]
CN5
-X2405
[R-/03/8C]
X19401-X2411
CN11
CN3
-X2103
CN13A:2
[C-/01/6F]
:B1
:B2
-U21
[C-/11/2F]
Robot Cable
X-Axis Limit (+)
X-Axis Limit (-)
Robot Cable
X Beam (Rear)
6
4
5
3
3
2
12
5
DOCOM
LSP
LSN
DICOM
Plate
SD
2
4
3
1
1
2
Main Circuit Power Supply
Control Circuit Power Supply
:6
:15
:8
:10
:12
:4
:2
:5
:13
2
4
3
7
8
1
P5
LG
MRR
MR
MD
MDR
SD
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
to A22R-X221A
20
EM1
5
18
9
19
8
To U94 (Counter Board)
(/Phase A)
(/Phase B)
(Phase B)
(Phase A)
CN1
:24,16
:22,14
:21,13
:23,15
X9401
:5
:6
:7
:8
17
6
16
LBR
LA
LAR
8
7
10
7
LB
9
SSCNET3(ch1)
1
2
1
2
Connector Case
Linear Scale Head
(Converter)
SSCNET3(ch1)
From A23F-X231B
1 2 3 4 5 6 7 8
A
B
C
D
E
F