00193699-01.pdf - 第91页
SIPLACE Instrucciones de software SR.504.xx 8 Nuevas funciones en la versión 504. 01 Edición 01/03 ES 8.7 SITEST: nuevas funciones 91 T winhead 8 8 – Calibrado de cabezales y cá maras: En el cuadro de diálo go "All …
8 Nuevas funciones en la versión 504.01 SIPLACE Instrucciones de software SR.504.xx
8.7 SITEST: nuevas funciones Edición 01/03 ES
90
8.7 SITEST: nuevas funciones
NOTA
La descripción detallada de las nuevas funciones de SITEST se encuentra en las "Instrucciones
de software SITEST 504“ así como en la ayuda online de SITEST. 8
Se han llevado a cabo las siguientes adaptaciones para la versión de software 504: 8
– Dependiendo de la configuración de la máquina se puede activar y desactivar en las cámaras
RV, IC y FC la imagen en vivo.
– Descarga de firmware: Nuevos subsistemas son Twin Head (Seg1, Seg2), Twin Head eje-Z y
Dp (Seg1, Seg2), módulos ES, cámara RV de TC, cámara IC-FC.
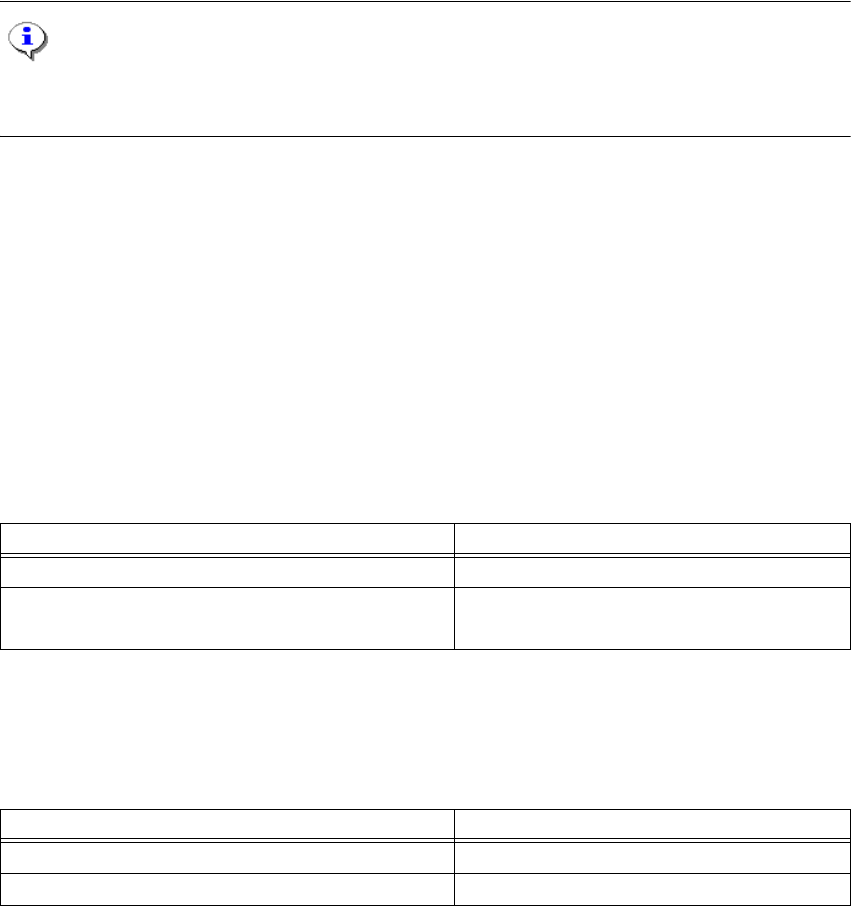
– Configuración de la máquina: Se puede configurar en el portal 1 un cabezal de 12, un cabezal
de 6 o un Twinhead. Para cada tipo de cabezal se pueden configurar las cámaras y los cam-
biadores de pipetas siguientes:
Cabezal de 12 segmentos 8
8
Cabezal de 6 segmentos 8
8
8
Cámara CO 1 8 Cambiador de pipetas 8
Cámara RV (tipo 12) FOV
a
24 x 24 8 RV12 estándar 8
Cámara RV (tipo 14) FOV 15,5 x 15,6 DCA
b
8 RV12 de 2 hileras
RV12 de 3 hileras 8
a. FOV= field of view (medición MFOV): se capturan de varias secciones (una sección es
un FOV) y se agrupan en un conjunto.
b. DCA = direct chip access.
Cámara CO 1 8 Cambiador de pipetas 8
Cámara RV (tipo 13) FOV 39 x 39 8 RV12 estándar 8
Cámara RV (tipo 14) FOV 15,5 x 15,6 DCA 8 RV12 de 2 hileras 8
SIPLACE Instrucciones de software SR.504.xx 8 Nuevas funciones en la versión 504.01
Edición 01/03 ES 8.7 SITEST: nuevas funciones
91
Twinhead 8
8
– Calibrado de cabezales y cámaras: En el cuadro de diálogo "All heads and cameras“ se pue-
den seleccionar las funciones de calibrado para cada zona de colocación.
– Cabezales y trama: En el cuadro de diálogo "Cabezales y trama“ se puede elegir ahora el an-
cho de trama para la placa de trama nueva o la antigua (apartado 8.7.1).
– Laterales de transporte. Se calculan los valores de corrección para el ajuste de ancho del
transporte.
– Determinación de parámetros de portal: Aproximación a las posiciones de la máquina con la
cámara TC.
– Marcha continua de portal: Se ejecuta simultáneamente una marcha continua con el eje-X e Y.
– Portal – funciones de eje: Se calcula para el eje seleccionado automáticamente el área de des-
plazamiento y seguidamente se muestran las posiciones de interruptor límite y el área de des-
plazamiento mín. y máx., aplicándose al eje.
– Determinación de parámetros de cabezal RV: Aproximación a las posiciones de la máquina
con la pinola del cabezal RV.
– Cabezal RV – Cabezal y cámara RV: Se calibra la desviación del cabezal (distancia de cámara
RV TC).
– Calibrado de cámara RV: Se calibra la cámara RV.
– Twinhead:
– Funciones de soporte de Twinhead
– Funciones de eje para soporte de Twinhead
– Platina de cabezal para soporte de Twinhead
– Cámara IC, cámara FC
– Calibrado
–Trama TH
– Cambiador de pipetas - funciones de cabezal, funciones de cargador
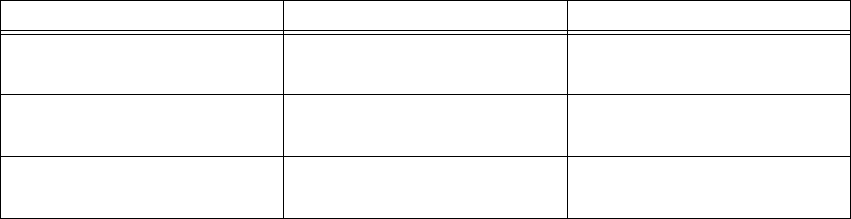
Cámara CO 1 8 Cámara CO 2 8 Cambiador de pipetas 8
Cámara IC (tipo 7) FOV
38 x 38 3 niveles 8
Cámara FC (tipo 11) FOV
9,2 x 11,4 8
Twinhead 3 / 1 8
Cámara IC (tipo 10) FOV
38 x 38 4 niveles 8
Cámara FC (tipo 20) FOV
11 x 11 8
Twinhead 5 / 2 8
Cámara IC (tipo 22) FOV
45 x 60 8
Cámara FC (tipo 21) FOV
21 x 21 8
Twinhead 8 / 4 8
8 Nuevas funciones en la versión 504.01 SIPLACE Instrucciones de software SR.504.xx
8.7 SITEST: nuevas funciones Edición 01/03 ES
92
– Ancho de transporte
– Transporte – Funciones
–CBM - Funciones:
– Ambos ejes de elevación pueden desplazarse a la posición de servicio.
– Ambos ejes de alimentación pueden desplazarse a la posición de servicio.
– CBM - Funciones de torre:
– Datos de servicio: Se visualizan los parámetros de cambio de nivel y horas de servicio.
– CBM - Ejes:
– Datos de la máquina – Posiciones: Posiciones en eje de alimentación. El parámetro "Co-
rreción de punto cero“ se sustituye por corrección de punto cero casete 1, corrección de
punto cero casete 2, corrección de punto cero casete 3, corrección de punto cero casete 4
– Corrección de punto cero casete 5 (indicación sólo en torre 1 / CBM2)
– Parámetro agregado: Posición de servicio
– Posiciones en eje elevador-Nuevo parámetro: Posición de llenado casete 5 (indicación sólo
en torre 1 / CBM2), posición de transición casete 5 (indicación sólo en torre 1 / CBM2), po-
sición de servicio
– Datos de la máquina – Datos de posicionamiento
– Datos de posicionamiento de eje de alimentación-Parámetro agregado: Velocidad de re-
tracción
– Valores estándar en eje de alimentación-Parámetro agregado: Velocidad de retracción es-
tándar
– CBM - Ajustes
– Determinación de parámetros de punto cero en eje de alimentación: a partir de CBM2 (es
decir, también en CBM1 -> Actualización de firmware) deben determinarse los parámetros
de corrección de punto cero del eje de alimentación para cada casete.
– Se elimina la comprobación necesaria hasta ahora del punto cero (casete 1) para todas las
demás casetes.
– CBM - Entradas/Salidas 1/2
– Se contemplan las siguientes nuevas entradas: Byte de entrada 3 / bit 4 = "Extra high waffle
pack trays“ (sólo CBM2/torre1), byte de entrada 3 / bit 5 = "Lifting axis belt monitoring“, byte
de entrada 3 / bit 6 = "Battery voltage ok“