00193699-01.pdf - 第97页
SIPLACE Instrucciones de software SR.504.xx 8 Nuevas funciones en la versión 504. 01 Edición 01/03 ES 8.11 Servicio de emergencia de desactivación de zonas de colo cación 97 8 Fig. 8.1 1 - 1 Opciones de software Puesto q…
8 Nuevas funciones en la versión 504.01 SIPLACE Instrucciones de software SR.504.xx
8.11 Servicio de emergencia de desactivación de zonas de colocación Edición 01/03 ES
96
8
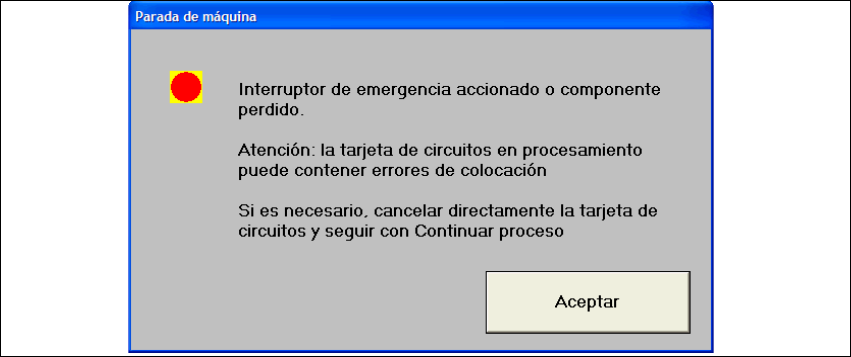
Fig. 8.10 - 2 Parada de la máquina
8.11 Servicio de emergencia de desactivación de zonas
de colocación
Se ha previsto un servicio de emergencia que permite desconectar una de las zonas de coloca-
ción. La zona de colocación desactivada actúa a partir de entonces a modo de simple trayecto de
transporte en vacío. Esto significa que los portales de dicha zona de colocación no se referencian.8
Si se desactivan ambas zonas de colocación, la máquina queda ajustada por completo a la mar-
cha en vacío. (Al contrario que la marcha en vacío ya disponible, en la que se requiere una refe-
rencia de los portales.) Los errores de transporte se tratan como hasta ahora. 8
La conexión y desconexión del servicio de emergencia se ha implementado en el marco de las
opciones de software ya disponibles. En la ficha "Máquina completa“, el operador puede activar
esta opción para cada zona de colocación antes de la referencia. 8
SIPLACE Instrucciones de software SR.504.xx 8 Nuevas funciones en la versión 504.01
Edición 01/03 ES 8.11 Servicio de emergencia de desactivación de zonas de colocación
97
8
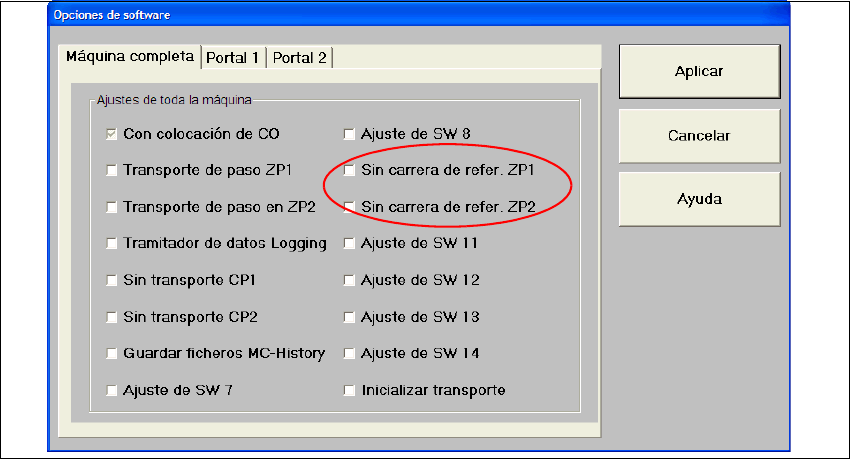
Fig. 8.11 - 1 Opciones de software
Puesto que esta prestación ha sido concebida como servicio de emergencia, no se soportan to-
dos los casos, en especial en la reconexión de la zona de colocación. 8
8 Nuevas funciones en la versión 504.01 SIPLACE Instrucciones de software SR.504.xx
8.12 Conexión CAN Edición 01/03 ES
98
8.12 Conexión CAN
La conexión CAN ha sido ampliada con las siguientes prestaciones: 8
– Ajuste de velocidad binaria
– Asignación de ID CAN
– Soporte del protocolo de plataforma III
8.13 Controlador de eje/CAN
El controlador de eje en el controlador de la máquina MC se encarga de la comunicación con el
eje. Para la Siplace HF, esta interfaz ha sido convertida de bus SMP a bus CAN. Como protocolo
se utiliza el de la plataforma III para subsistemas en el bus CAN. 8
De este modo no es necesario generar una versión de software adicional en el firmware del eje
para representar el protocolo de la plataforma II utilizado hasta ahora por el bus SDP en CAN. A
la par del cambio a la interfaz de bus CAN se modifica en el firmware de eje también la estructura
de datos. 8
8.14 Lector de códigos de barras
8.14.1 Lector de códigos de barras de CO
En la versión de software 504 puede utilizarse tanto el lector de códigos de barras por cable dis-
ponible, incluido el control de setup, como también el SIPLACE Mobile Verifier (SMV). 8
El control de setup se puede solicitar a través del menú Visualización --> Setup. 8
8.14.2 Lector de códigos de barras de TC
En la versión de software 504 puede utilizarse tanto el lector de códigos de barras de rayas como
también el lector de códigos de barras 2D. 8
El cuadro de diálogo "Código de barras de tarjeta de circuitos" se puede solicitar a través del
menú Opciones --> Código de barras de TC.... 8