TUT-CP842-Oper guide-preliminary.pdf.pdf - 第22页
Station 1 Part pickup: Nozzle picks up a part. Feeder advance: The part feed mechanism of the feeder is oper- ated to feed the next part to the pickup posi- tion. Pickup offset: When a part is picked up the NZ motor carr…
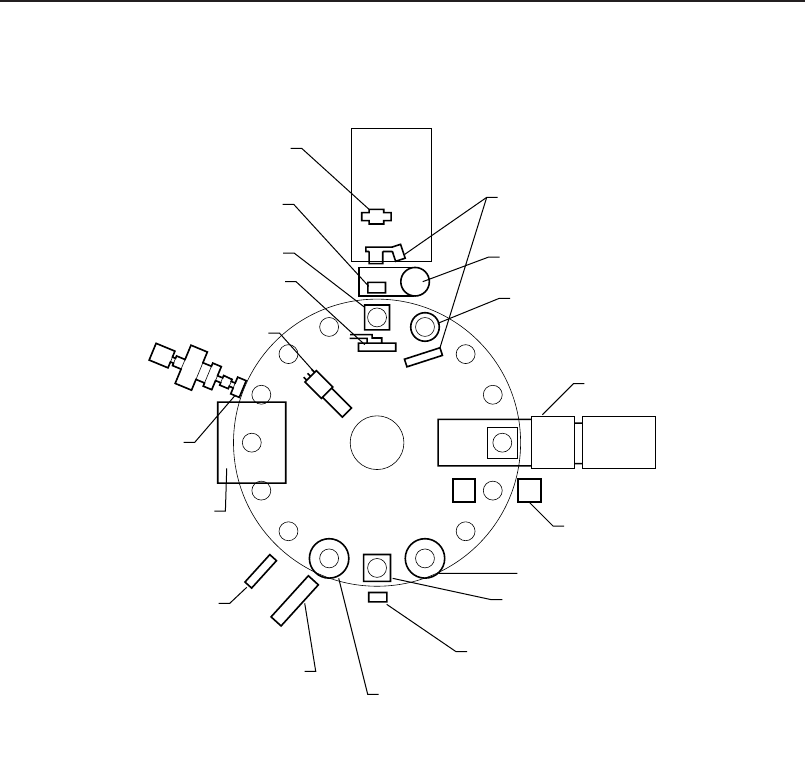
Stations 1 ~ 16
These stations represent the locations at which the machine unit initiates
operation of each placing head. There are 16 stations which is the same as the
number of placing heads. Each station has a designated role in the part
placement process.
ST1 Pickup position offset
C84INT008E
ST2
Large parts check
ST2 Pre-theta
ST8 Fine theta
ST9
Placing nozzle up/down
ST10
Nozzle clutch origin position
Nozzle clutch engagement check
ST10
Reverse theta
ST11
Head A detection
ST13
Reject dump parts
ST14
Nozzle change
ST15
Nozzle post-change check
ST9
Mechanical valve switch
ST5
Vision processing
ST1 Feeder advance
ST1
Mechanical valve switch
ST1
Picking nozzle up/down
Waste tape disposal
ST6
Parts height check,
nozzle length check (Option)
Chapter 1: Machine Configuration
Preliminary
1-11CP-842E/842ME Operator’s Guide

Station 1
Part pickup: Nozzle picks up a part.
Feeder advance: The part feed mechanism of the feeder is oper-
ated to feed the next part to the pickup posi-
tion.
Pickup offset: When a part is picked up the NZ motor carries
out fine adjustment of the nozzle height.
Y-direction pickup offset: The NY motor adjusts the nozzle in the Y-
direction for pickup.
Station 2
Large parts check: Asensor is used to detect pickup of large parts.
Pre-theta (PQ): The PQ motor is used to rotate parts by rotat-
ing the placing head for initial angle correc-
tion.
Station 5
Vision processing: The narrow view or wide view camera is used
to check for part pickup errors and to deter-
mine whether a part is suitable for placement
or not.
Station 6
Parts height check & A camera checks the height of the picked up
Nozzle length check: part, and the placement height is adjusted
(Option) according to the offset data. The same cam-
era also checks the nozzle length.
Station 8
Fine theta (FQ): Based on the result of vision processing, the
FQ motor rotates the part to its final placement
angle.
Station 9
Part placement: The part is placed on the panel. Parts that are
judged to be unsuitable by the vision system
are not placed.
Station 10
Reverse theta (RQ): The RQ motor returns the placement head to
its origin position and prepares for nozzle
change.
Clutch contact check: The meshing check sensor is used to check
whether the RQ clutch firmly meshes with the
clutch on the top of the placing head.
Station 11
Head-A detection: A sensor is used to carry out head-A detection
for compiling production data.
Chapter 1: Machine Configuration
Preliminary
1-12 CP-842E/842ME Operator’s Guide

Station 13
Reject dump parts: Rejected parts that are not placed at station 9
are discarded into the reject parts box.
Station 14
Nozzle change: The NC-motor rotates the nozzle change
clutch to change the nozzle on each placement
head to the nozzle that is to be used in the next
placement sequence.
Station 15
Nozzle post-change check: This check is used to verify that the nozzle has
been changed to the nozzle that will be used
next.
Chapter 1: Machine Configuration
Preliminary
1-13CP-842E/842ME Operator’s Guide