TR8S_维修调整.pdf - 第16页
Rev 1.0 维修调整要领书 ・ 调节器每转 1 圈则高度变化 2.5mm 。 ・ 由于调节器的螺丝有遊隙,用螺母将调节器固定时请注意以下事项。 ① 考慮到遊隙, Z 高度定为 - 9.15mm 前后 ② 旋紧固定用螺母时,高度调整用螺母也要用扳手卡住,以防止调节器旋转。 ・ 设置脚轮、调节器时要 4 个均衡地转动。 ・ 设置完成后,把 EF08 ( HS 或 HD )插入后侧 14 号通道,如没有干渉就是正确的位置。 并且,请关闭 …
Rev1.0
维修调整要领书
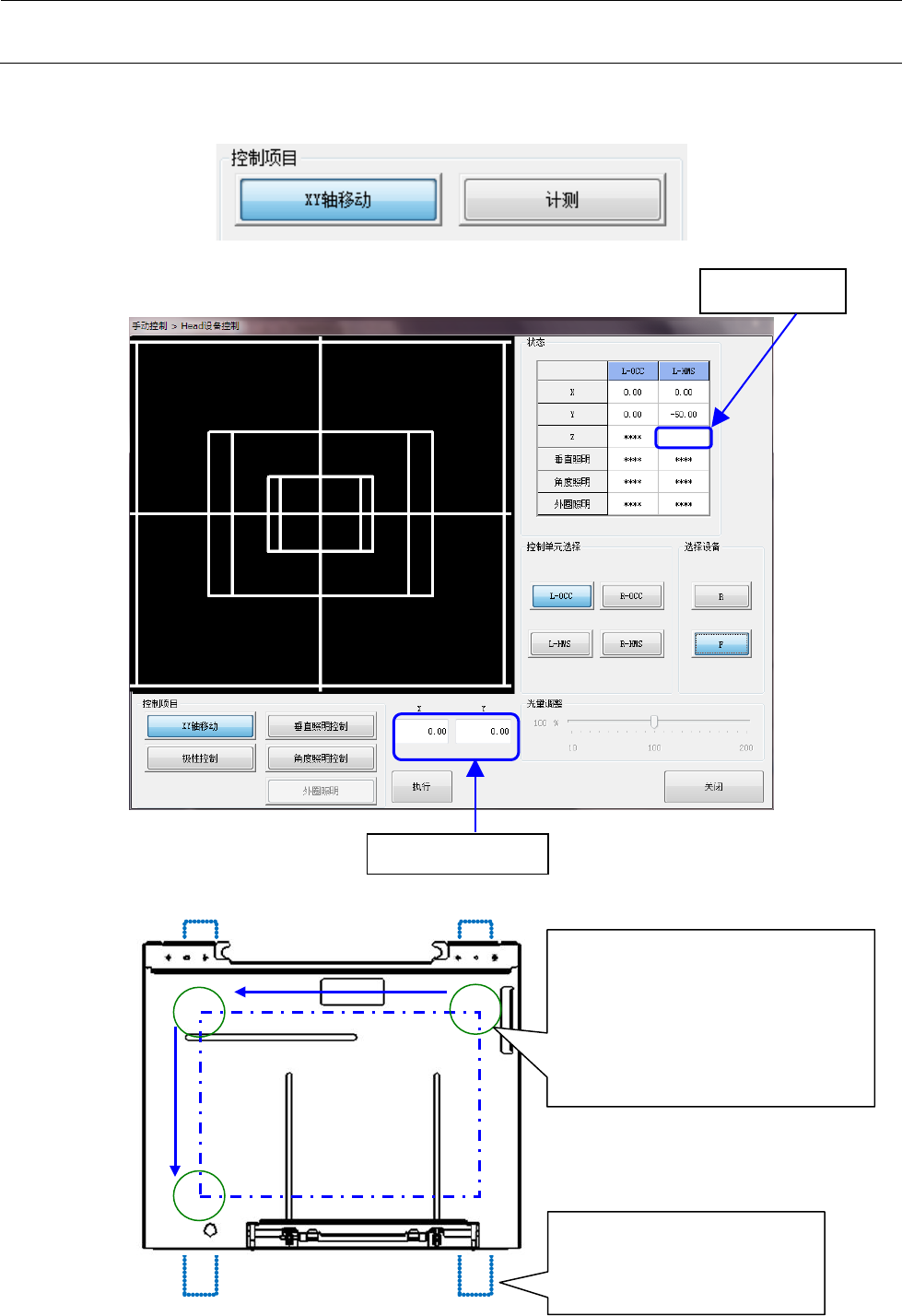
反复进行画面的 XY 轴移动和 Z 高度测量⇔调节器的高度调整,确认画面,要达到空状态下托盘座板
上的 3 点 Z(高度)数值为 -9mm±0.1mm。
调整完成后,旋紧调节器的螺母将高度予以固定。
Z
高度显示框
X
、
Y
坐标输入框
以托盘座板前侧为起点,
通过后侧贴装头的R-HMS以下列3
点为目标进行高度测定。
① X=400 Y=1220
② X=675 Y=1220
③ X=675 Y=1400
测定点是托盘座板坐在白色
轨道上并且托盘座板挠曲小
的部位。
275mm
180mm
①
②
③
1-10
Rev1.0
维修调整要领书
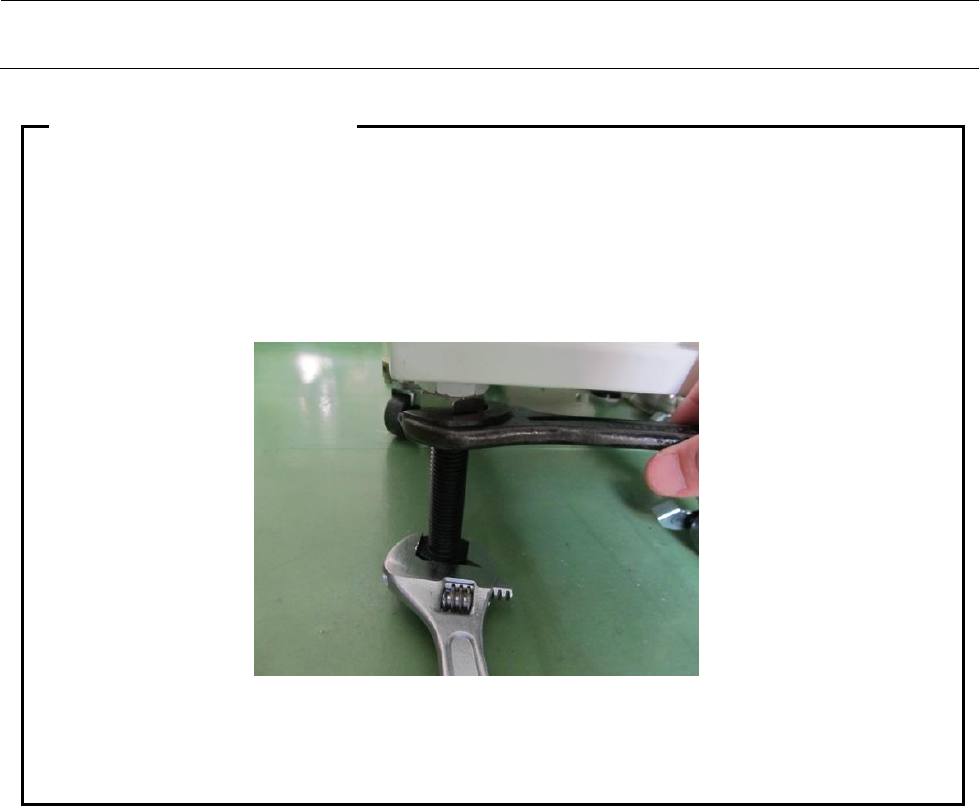
・ 调节器每转 1 圈则高度变化 2.5mm。
・ 由于调节器的螺丝有遊隙,用螺母将调节器固定时请注意以下事项。
① 考慮到遊隙,Z 高度定为 -9.15mm 前后
② 旋紧固定用螺母时,高度调整用螺母也要用扳手卡住,以防止调节器旋转。
・设置脚轮、调节器时要 4 个均衡地转动。
・ 设置完成后,把 EF08(HS 或 HD)插入后侧 14 号通道,如没有干渉就是正确的位置。
并且,请关闭 RX-6 安全护罩,检查与 TR8S 主体有无干渉。
水平调整操作的提示
1-11
Rev1.0
维修调整要领书
1-6.
传感器的检查
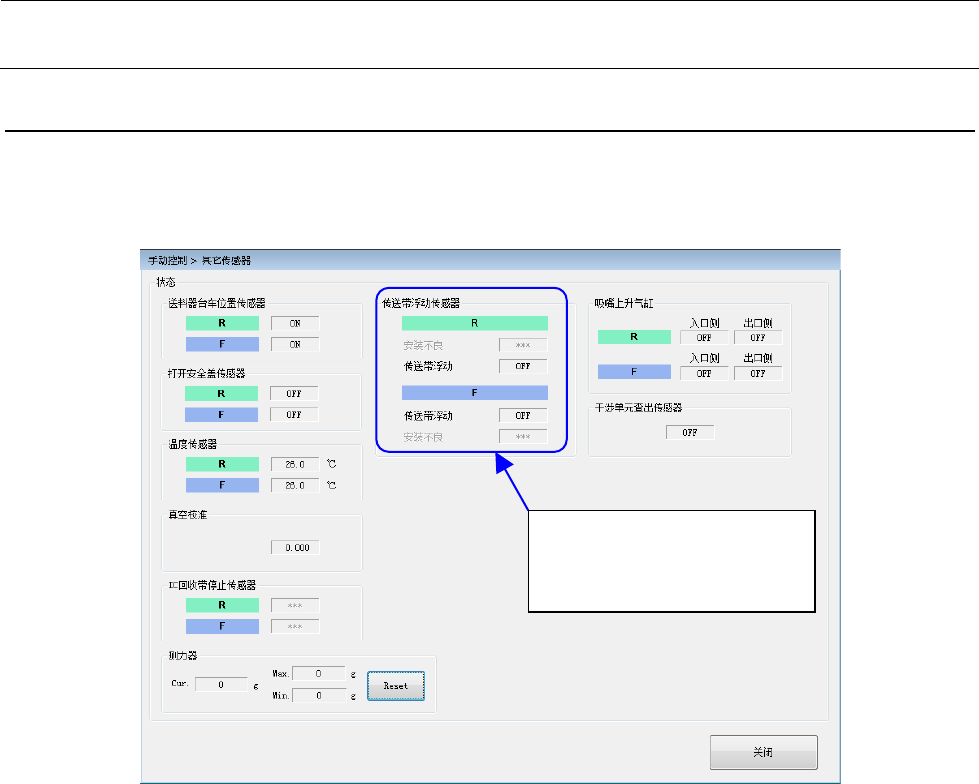
请向手动控制>其他>其它传感器 转移,使用 ETF8S 和 ETF8D 进行以下作业,以检查后侧传送带
浮起传感器的动作状况。
・ 故意打开供料器压盖,检查向台架插入时传感器是否变为 ON。
・ 要检查一下,在供料器压盖正常关闭的状态下从台架拔出供料器时,能否在传感器 OFF 状态不变
的情况下拔出。
传送带浮起传感器
・当检知时为“ON”
・当未检知时为“OFF”
1-12