识别装置.pdf - 第37页
HGR14 附录 1.3 各种形状输入数据项目 附录 1-37 形状编号 对象形状 参考编号 对象部品 ( 类别 ) 对应 Ver. 4f 四方形内有圆形电极 201 ~ 205 BGA CSP ( µ BGA) LGA 等 V7.00 以上 形状以及输入数据 识别方式以及结果 长度 L 宽度 W 球行数 N1 球列数 N2 球间距行 P1 球间距列 P2 球图形 球直径 R 球直径容许量 判断标准 1) 长度 : L ± (20%) …
HGR14
附录 1.3 各种形状输入数据项目
附录
1-36
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
4e
J
引线部品
形状以及输入数据
识别方式以及结果
判断标准
预约
(Top view)
可识别姿势
(
只可识别以下式样
<
也有一部分例外
> )
式样编号
式样
进给方向
式样角度
(
备注
)
不进行引线的有无检查。
当前未使用
HGR14-C-PMC01-A02-00
HGR14
附录
1.3
各种形状输入数据项目
附录
1-37
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
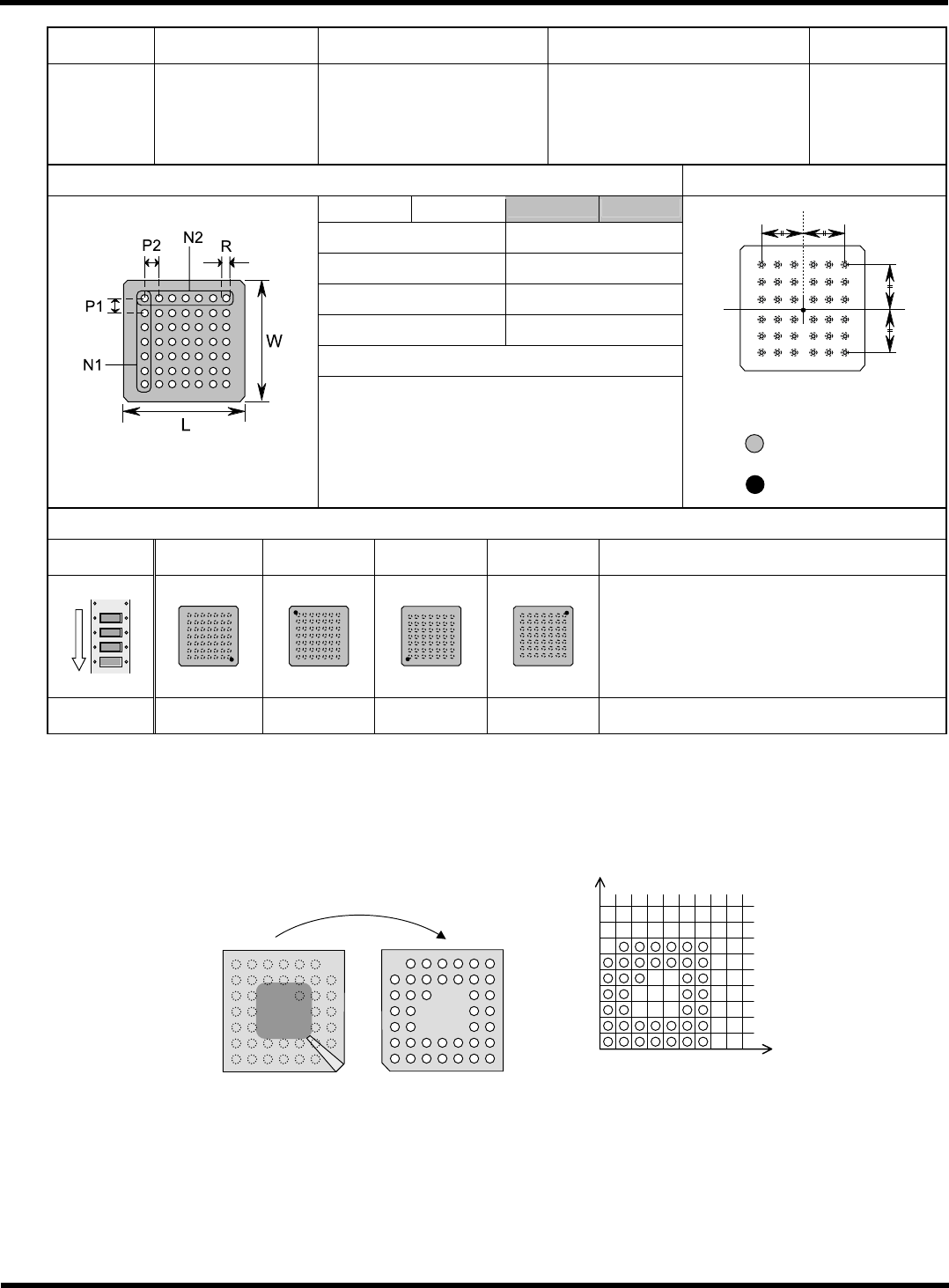
4f
四方形内有圆形电极
201 ~ 205 BGA
CSP (
µ
BGA)
LGA
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
球行数
N1
球列数
N2
球间距行
P1
球间距列
P2
球图形
球直径
R
球直径容许量
判断标准
1)
长度
: L
±
(20%)
2)
宽度
: W
±
(20%)
3)
球直径
: R
±
(
球直径容许量
)
4)
角度
:
识别角度
±
35[
°
]
等
(
Bottom
view)
c
在全球的中心识别
:
检测位置
:
检测中心
可识别姿势
(
只可识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(
备注
)
1.
关于
CM301
,球直径
/
球容许量为选项。
(30%
固定
)
2.
对于球直径容许值,一般请设定
20 ~ 30%
。
3.
输入球图形时的注意事项。
1)
请输入将式样角度
0
°
的部品向横向反转的状态。
向横向反转
行
数
列数
4. LGA
时,通过照明值示教使侧方为
(Lamp5) =0
,然后将反射
(Lamp4)
提升直到电极发光。数据设
定与
BGA
相同。
(
仅对应多功能吸头
)
1
10
10
1
HGR14-C-PMC01-A02-00
HGR14
附录 1.3 各种形状输入数据项目
附录
1-38
5.
检查球的行列、个数比指定的数据要多时,请使用
No.202/203/204
。
1) No.202:
检查球图形内部的多余的球。
2) No.203:
检查球图形外部的多余的球。
3) No.204:
检查球图形内部和外部的多余的球。
对象部品
202 203 204
检查有存在
球的位置
检查无存在
球的位置
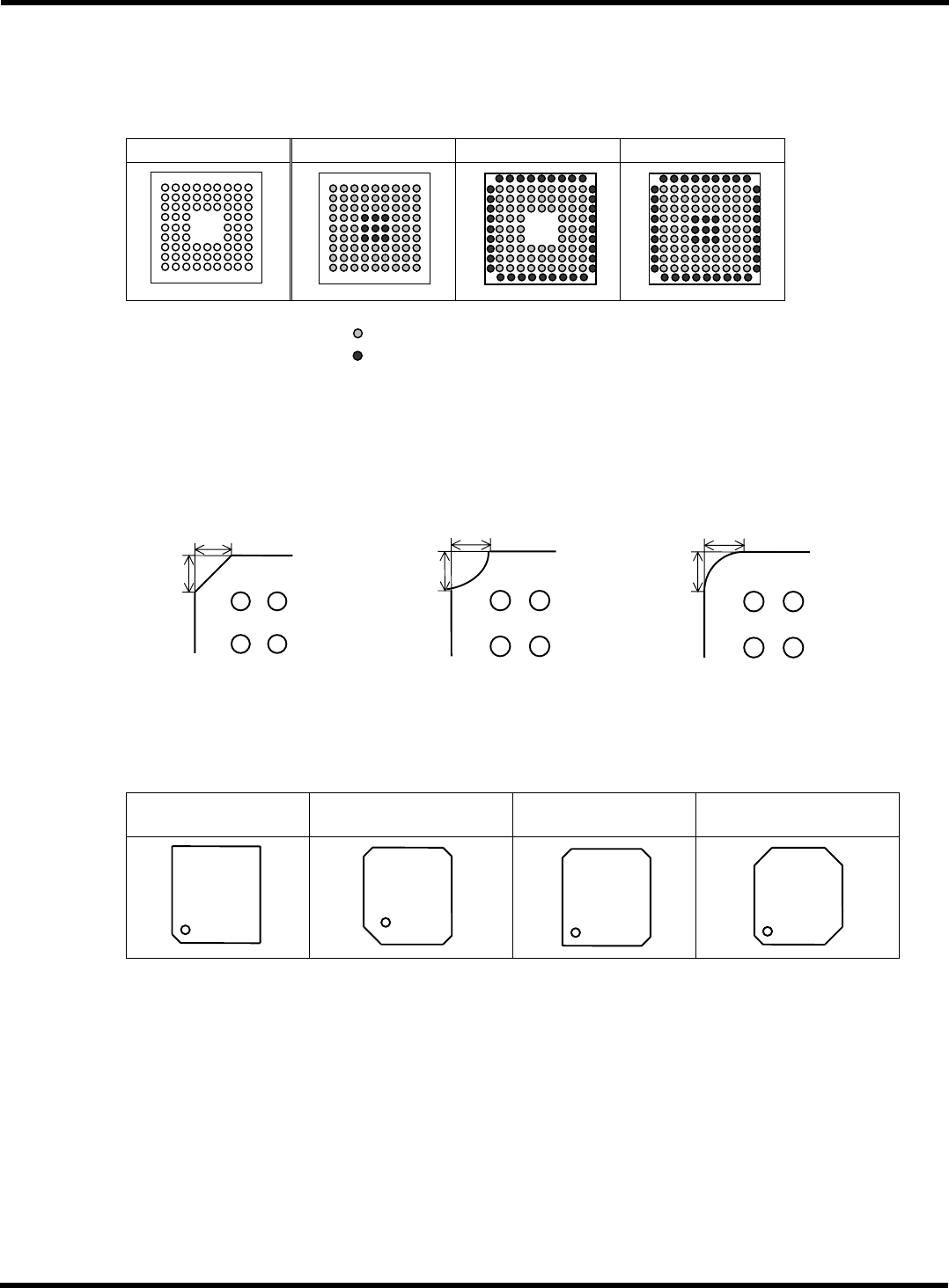
6.
由部品外形形状辨别极性时,请使用
No.205
。
(
可辨别极性判定的部品
)
1)
为了极性辨别,假设角部约有
45
°
的切断部分。另外,因根据切断部分的面积进行辨别,对带
有凸状
R
的不对应。
OK: 45°切断 OK: 凹状 R 切断 NG: 凸状 R 切断
A
及
B
的尺寸在如下范围内。
最小
:
0.5 mm
最大
:
芯片尺寸
LW
之中,较小芯片的
10
分之
1
2) 表示极性的图形有如下
4
种。
切断
1
角部 切断
4
角部 切断
3
角部 切断
4
角部
仅切断极性角部 仅极性角部的切断部分较大 仅不切断极性角部 仅极性角部的切断部分较小
∗
极性角部之外的
3
个角部必须为相同形状。
3)
极性角部与其他角部相比时,上述的
A
及
B
的尺寸必须有
0.5 mm
以上的差异。另外,根据极
性角部与其他角部之间的差异下判断,不输入
A
及
B
的尺寸数据。
4)
进行极性判定时,部品外周部需要有明确的对比
(
明暗对比
)
。材料是
polyimides
或未涂敷抵抗
的薄型玻璃环氧等,外周透过的材料无法判定。
B
A
B
A
B
A
HGR14-C-PMC01-A02-00