99419_UR5e_User_Manual_zh_Global.pdf - 第107页
警 告 倾 翻 的 危 险 如 果 机 器 人 没 有 安 全 地 放 置 在 坚 固 的 表 面 上 , 机 器 人 有 可 能 会 倾 倒 并 造 成 伤 害 。 18. 3.2. 开 / 关 控 制 箱 控 制 箱 主 要 包 含 连 接 机 器 人 手 臂 、 示 教 盒 和 任 何 周 边 设 备 的 物 理 电 气 输 入 / 输 出 接 口 。 必 须 打 开 控 制 箱 才 能 给 机 器 人 手 臂 通 电 。 1. …
18.2.3. 页脚按钮
初始化可管理机器人状态。当指示灯为红色时,按下它使机器人操作。
速度滑块可实时显示机器人手臂移动的相对速度,同时将安全
设置考虑在内。
模拟按钮可在模拟模式和真实机器人之间切换程序执行。在模拟模式下
运行时,机器人手臂不会移动。因此,机器人不会在碰撞中损坏自身或附近的设备。如果您不
确定机器人手臂将执行什么操作,请使用模拟模式测试程序。
手动高速允许工具速度暂时超过 250mm/s。只有在配置了 3 档位使动装置时,才能
在手动模式下使用此按住保持运行功能。
播放可启动当前加载的机器人程序。
步骤可单步运行程序。
停止可中止当前加载的机器人程序。
18.3. 安装设置
18.3.1. 安装机器人手臂和控制箱
安装并接通机器人手臂和控制盒的电源,以开始使用 PolyScope。
请参阅硬件安装手册了解详细的安装说明。
1. 取出机器人手臂和控制箱。
2. 将机器人手臂安装在防震的坚固表面。
验证表面可以承受的强度至少是基座关节最大扭矩的 10 倍,并且是机器人手臂重量的
至少 5 倍。
3. 将控制箱放置在其支脚上。
4. 将机器人电缆连接到机器人手臂和控制箱。
5. 插入控制箱的市电插头。
UR5e 92 用 户 手 册
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

警告
倾翻的危险如果机器人没有安全地放置在坚固的表面上,机器人有可能会倾倒
并造成伤害。
18.3.2. 开/关控制箱
控制箱主要包含连接机器人手臂、示教盒和任何周边设备的物理电气输入/输出接口。必须打
开控制箱才能给机器人手臂通电。
1. 按下示教盒的电源按钮开启控制箱。
2. 等待底层操作系统的文字( 后接按钮) 出现在屏幕上。
将会出现“入门”屏幕,提示您开始对机器人进行编程。
18.4. 初始化
首次启动时,可能出现“无法继续”对话框。选择转到初始化屏幕访问“初始化”屏幕。
在页脚的左侧,“初始化 ”按钮使用颜色指示机器人手臂的状态:
• 红色关机。机器人手臂处于停止状态。
• 黄色空闲。机器人手臂已通电,但并未准备好进行正常操作。
• 绿色正常。机器人手臂已通电,并准备好进行正常操作。
用 户 手 册 93 UR5e
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
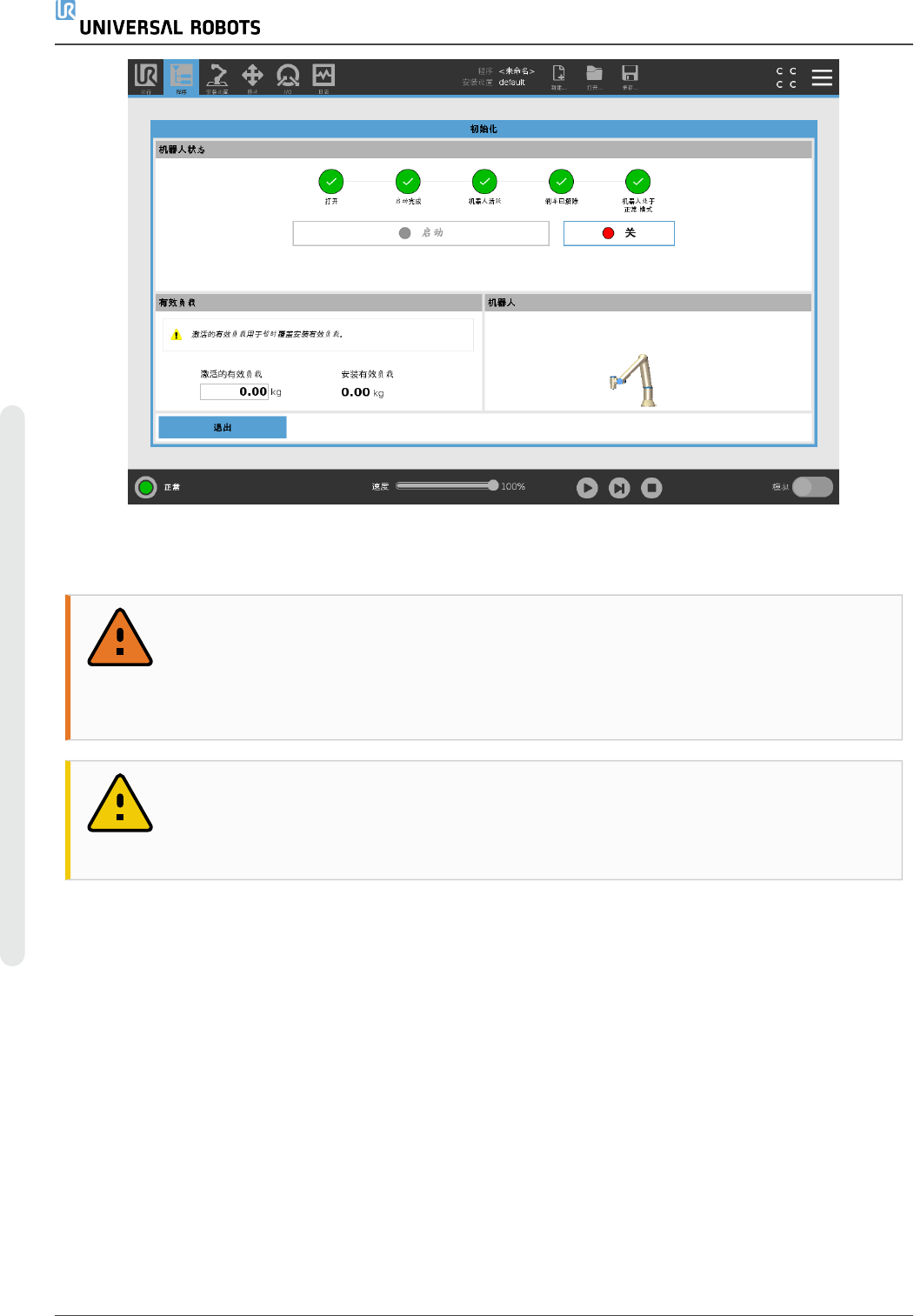
18.4.1. 启动机器人手臂
警告
在启动机器人手臂之前,请务必确认实际有效载荷和安装正确无误。如果这些
设置错误,机器人手臂和控制箱将无法正常工作,并可能会对人员或设备造成
危险。
小心
确保机器人手臂没有接触物体( 例如桌子) ,因为机器人手臂与障碍物之间的碰
撞可能会损坏关节齿轮箱。
如要启动机器人:
1. 点击带有绿色 LED 的 ON 按钮启动初始化过程。然后,LED 指示灯变成黄色,指示电源
已打开并处于空闲状态。
2. 点击启动按钮松开制动器。
3. 点按带有红色 LED 的 OFF 按钮关闭机器人手臂。
• PolyScope 启动后,点按 ON 按钮一次给机器人手臂通电。然后,状态指示灯变成黄色,
指示机器人已打开并处于空闲状态。
• 在机器人手臂状态为空闲时,点按“启动”按钮启动机器人手臂。此时,传感器数据会根
据配置的机器人手臂安装数据进行核对。
UR5e 94 用 户 手 册
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。