99419_UR5e_User_Manual_zh_Global.pdf - 第70页
关 节 0( 底 座 ) 的 停 止 时 间 载 荷 为 5k g 的 33% 时 的 停 止 时 间 ( 秒 ) 载 荷 为 5k g 的 66% 时 的 停 止 时 间 ( 秒 ) 载 荷 为 最 大 载 荷 5k g 的 停 止 时 间 ( 秒 ) 关 节 1( 肩 部 ) 的 停 止 距 离 载 荷 为 5k g 的 33% 的 停 止 距 离 ( 米 ) 载 荷 为 5k g 的 66% 的 停 止 距 离 ( 米 ) 载 荷…
11.制动时间和制动距离
提示
您可以设置用户定义的安全额定最大停止时间和距离。请参阅3.1. 前言 在本页
15和22.6. 安全菜单设置 在本页109。
如果使用了用户定义的设置,则可以动态调整程序速度以始终符合所选的限
值。
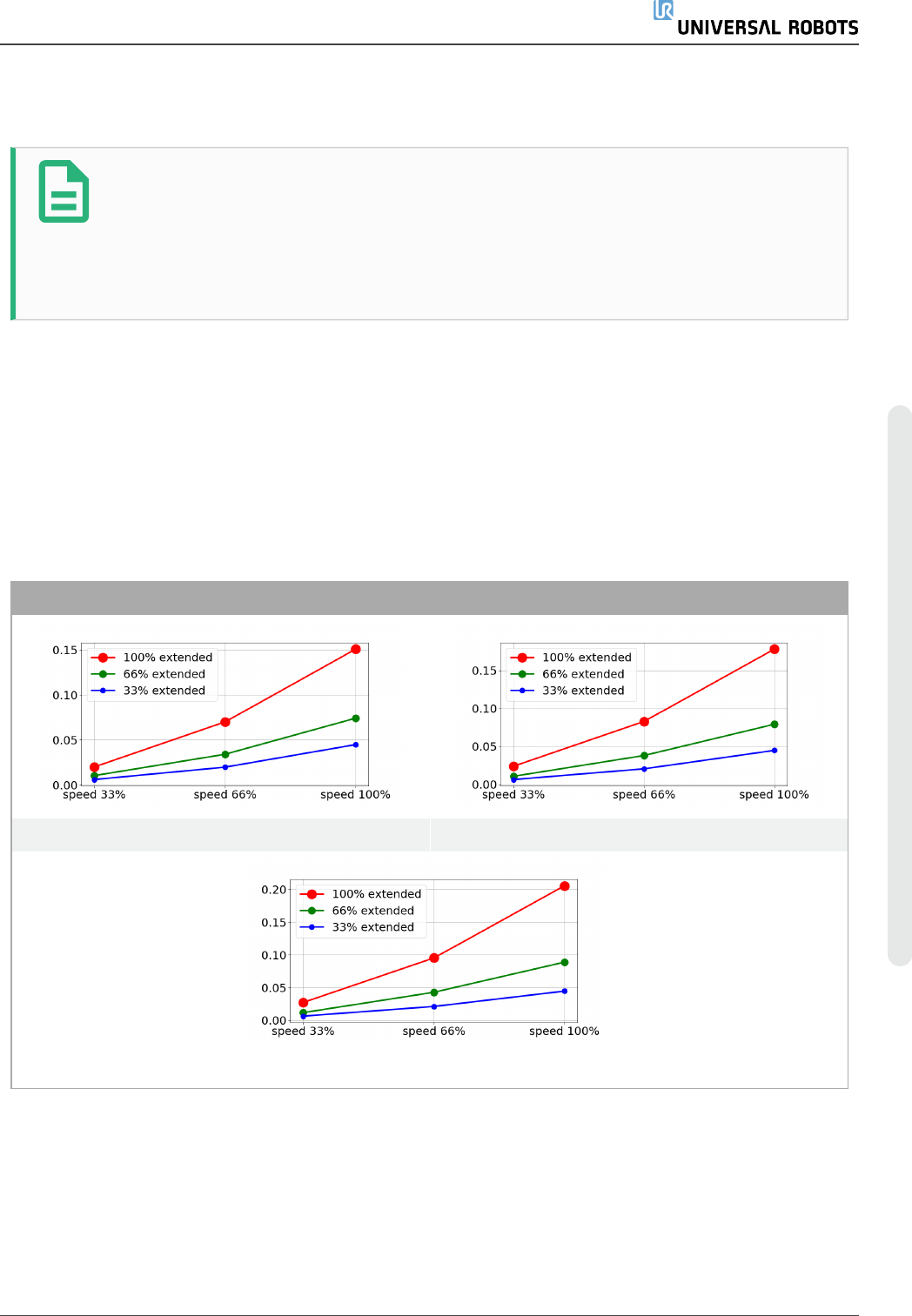
为关节 0( 机座) 、关节 1( 肩部) 和关节 2( 肘部) 提供的图形数据对停止距离和停止时间有效:
• 0 类
• 1 类
• 2 类
对关节 0 的测试通过水平移动进行,即旋转轴垂直于地面。
在关节 1 和关节 2 测试过程中,机器人遵循垂直轨迹,旋转轴平行于地面,并在机器人向下移
动时执行了停止操作。
关节 0( 底座) 的停止距离
载荷为 5kg 的 33% 时的停止距离( 米) 载荷为 5kg 的 66% 时的停止距离( 米)
载荷为最大载荷 5kg 时的停止距离( 米)
用 户 手 册 55 UR5e
11.制 动时 间和 制动 距离
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
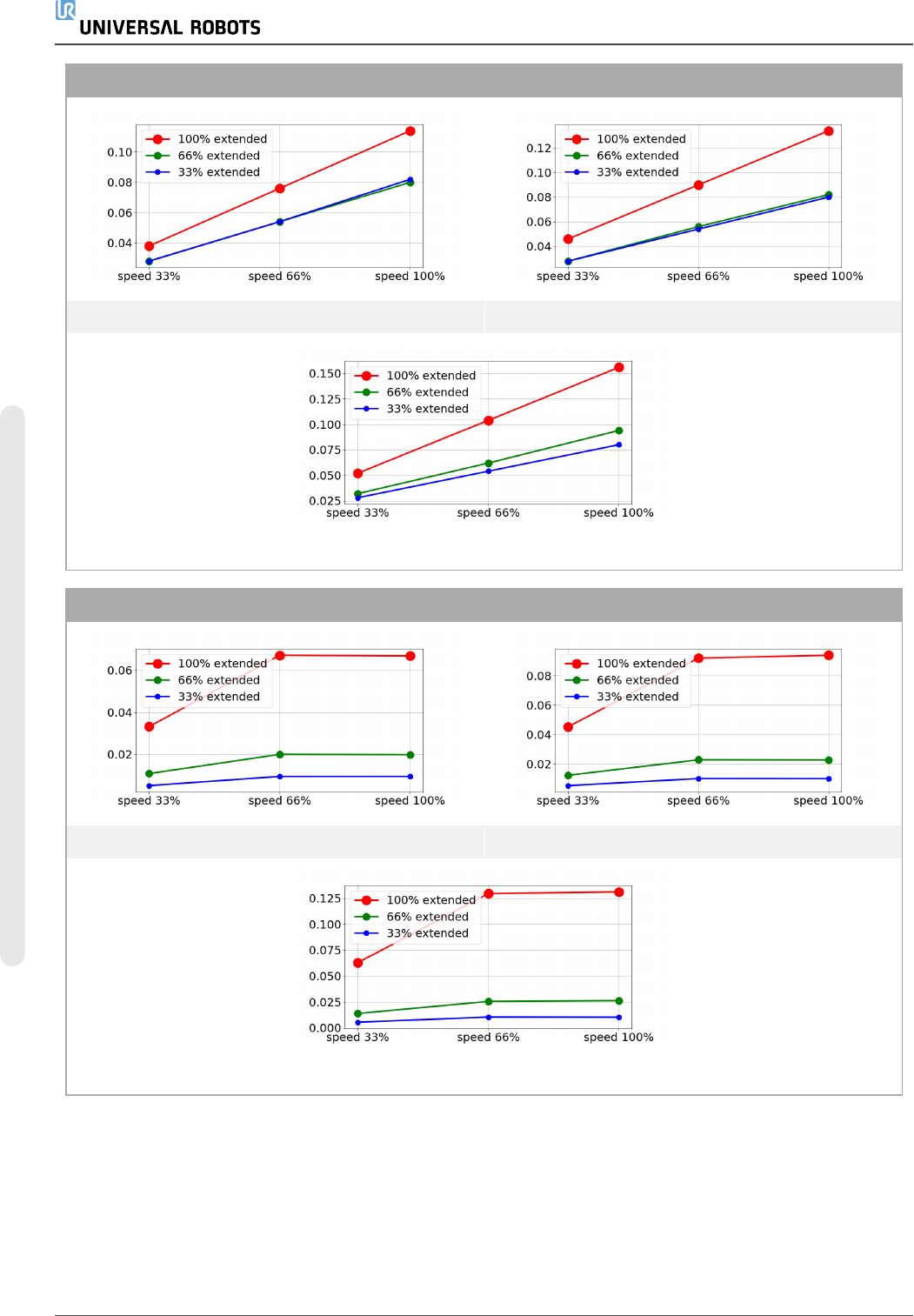
关节 0( 底座) 的停止时间
载荷为 5kg 的 33% 时的停止时间( 秒) 载荷为 5kg 的 66% 时的停止时间( 秒)
载荷为最大载荷 5kg 的停止时间( 秒)
关节 1( 肩部) 的停止距离
载荷为 5kg 的 33% 的停止距离( 米) 载荷为 5kg 的 66% 的停止距离( 米)
载荷为最大载荷 5kg 的停止距离( 米)
UR5e 56 用 户 手 册
11.制 动时 间和 制动 距离
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
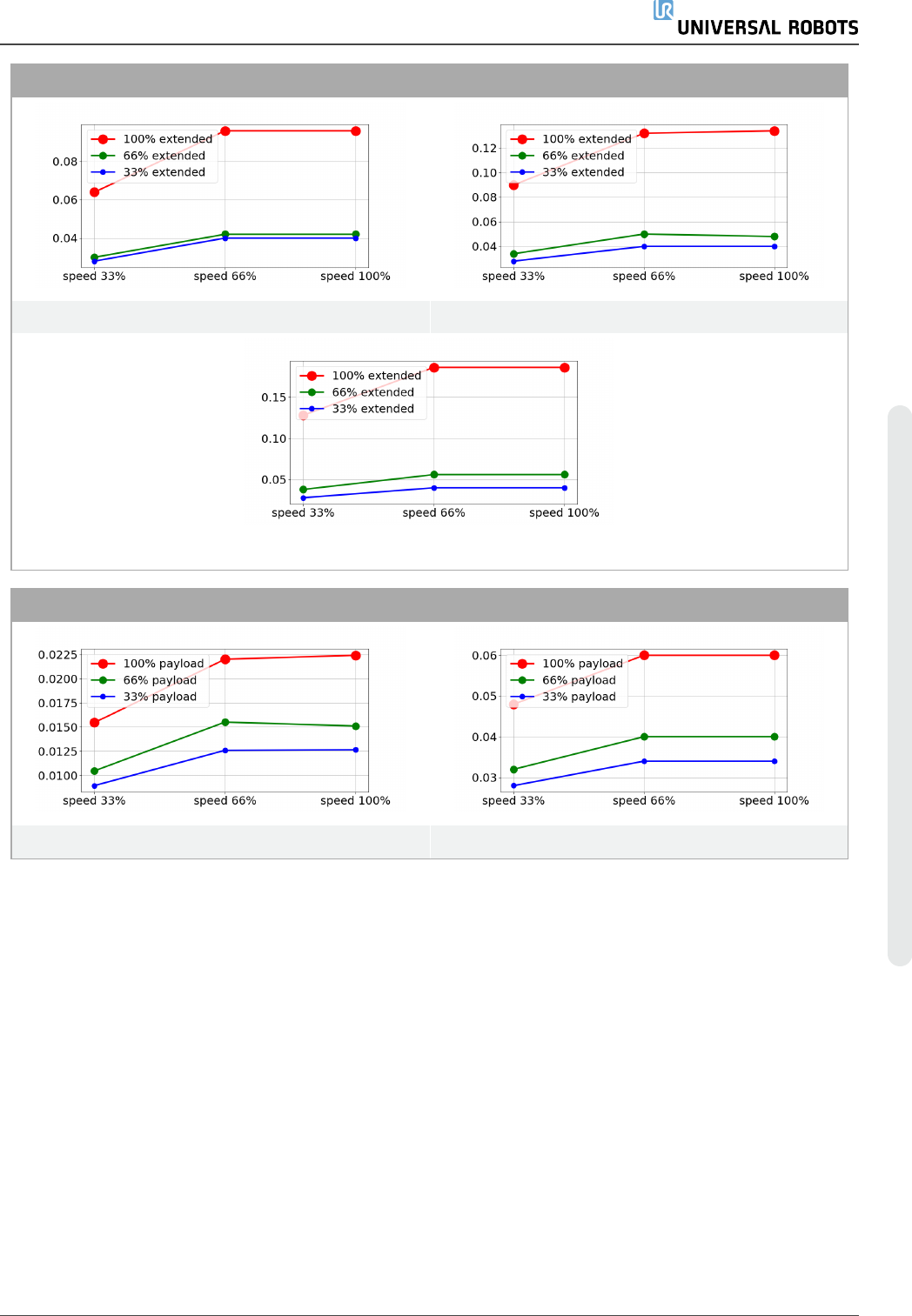
关节 1( 肩部) 的停止时间
载荷为 5kg 的 33% 的停止时间( 秒) 载荷为 5kg 的 66% 的停止时间( 秒)
载荷为最大载荷 5kg 的停止时间( 秒)
关节 2( 肘部) 的停止距离和时间
所有有效载荷的停止距离( 米) 所有有效载荷的停止时间( 秒)
用 户 手 册 57 UR5e
11.制 动时 间和 制动 距离
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。