99419_UR5e_User_Manual_zh_Global.pdf - 第138页
22. 20.1. 编 辑 安 全 回 零 1. 在 页 眉 中 , 点 按 安 装 设 置 。 2. 在 屏 幕 左 侧 的 边 栏 菜 单 中 , 点 按 一 般 , 然 后 选 择 回 零 。 3. 点 按 编 辑 位 置 并 设 置 新 的 机 器 人 手 臂 位 置 , 然 后 点 按 确 定 。 4. 在 边 栏 菜 单 中 , 点 按 安 全 , 然 后 选 择 安 全 原 点 。 您 需 要 输 入 安 全 密 码 才 …
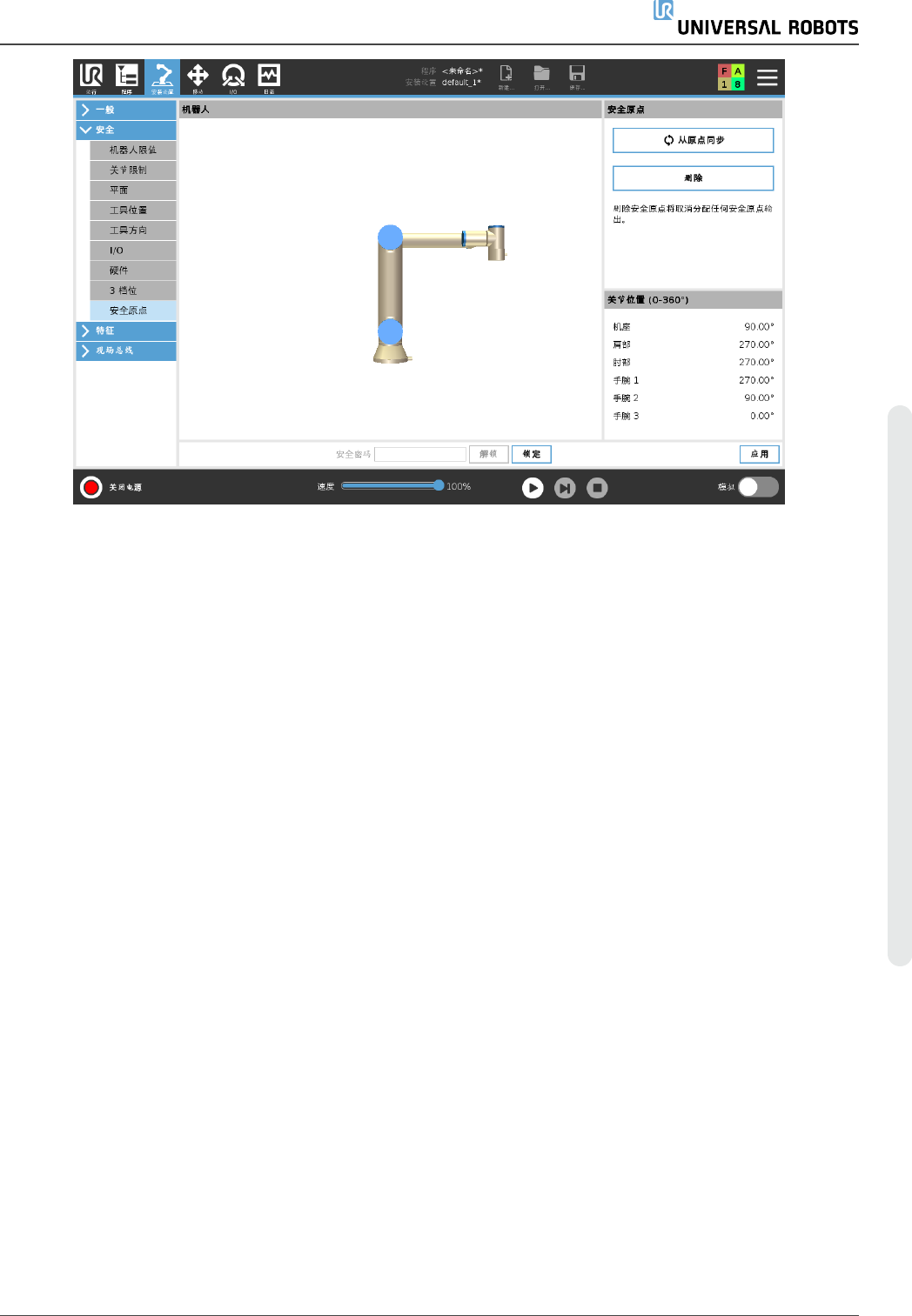
22.18.1. 与回零同步
1. 在页眉中,点按安装设置。
2. 在屏幕左侧的边栏菜单中,点按安全,然后选择安全原点。
3. 在安全原点下,点按与原点同步。
4. 点按应用,然后从弹出的对话框中选择应用并重启。
22.19. 安全回零输出
安全原点必须在安全原点输出之前定义( 请参阅22.16.2. 输出信号 在本页121) 。
22.19.1. 定义安全回零输出
1. 在页眉中,点按安装设置。
2. 在屏幕左侧的边栏菜单中,点按安全,然后选择 I/O。
3. 在输出信号的 I/O 屏幕上,从“功能分配”下的下拉菜单中选择安全原点。
4. 点按应用,然后从弹出的对话框中选择应用并重启。
22.20. 编辑安全回零
编辑安全回零不会自动修改预先定义的安全回零位置。如果这些数值不同步,则表示回零程
序节点未定义。
用 户 手 册 123 UR5e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
23.运行选项卡
运行选项卡让您可以使用尽可能少的按钮和选项简单地操作机器人手臂和控制箱。您可以将
简单的操作与保护 PolyScope 编程部分的密码相结合( 请参阅30.3. 设置 在本页231) ,使机器
人成为可以专门运行预编程序的一种工具。
在此屏幕上,您可以基于外部输入信号沿过渡自动加载和启动默认程序( 请参阅25.7. 启动 在
本页194) 。
自动加载和启动默认程序以及加电时自动初始化的组合可用于将机器人手臂集成到其他机器
中。
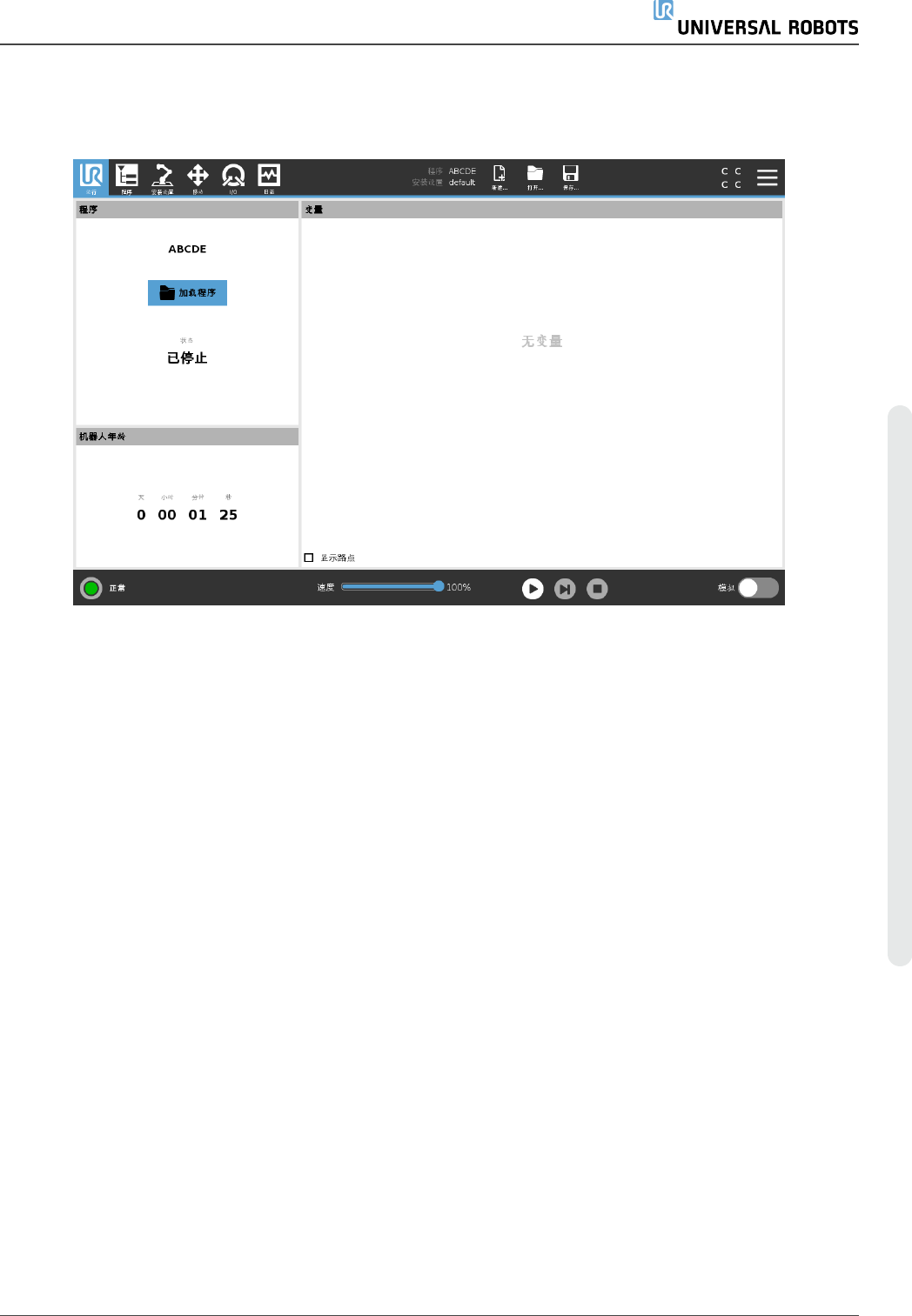
23.1. 程序
程序字段会显示加载到机器人上的程序的名称及其当前状态。您可以点按加载程序选项卡来
加载其他程序。
23.2. 变量
机器人程序可在运行时利用变量来存储和更新变量值。有两种变量可用:
安装变量
这些变量可以用于多个程序,其名称和值将与机器人安装设置一起持续存在( 请参阅25.6.
安装变量 在本页193) 。安装变量在机器人和控制箱重启后保持它们的值。
常规程序变量
这些变量仅适用于运行程序,且变量值在程序停止后即丢失。
显示路点
机器人程序使用脚本变量来存储有关路点的信息。
选中变量下的显示路点复选框,以在变量列表中显示脚本变量。
用 户 手 册 125 UR5e
23.运 行选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。