99419_UR5e_User_Manual_zh_Global.pdf - 第61页
使 用 工 具 模 拟 输 入 , 差 分 本 例 显 示 了 带 有 差 分 输 出 的 模 拟 传 感 器 连 接 。 将 负 输 出 端 连 接 至 GND (0V) , 即 可 像 非 差 分 传 感 器 一 样 工 作 。 POWER AI8 GND AI2 6.8 .7. 工 具 通 信 I/O • 信 号 请 求 R S485 信 号 使 用 内 部 自 动 防 故 障 偏 置 。 如 果 连 接 的 设 备 不 支 持 …
TI0
POWER
6.8.6. 工具模拟输入
工具模拟输入为非差分输入,可在“I/O”选项卡上设置为电压 (0-10V) 或电流 (4-20mA)( 请参阅
第 II 部分PolyScope 手册 在本页87) 。电气规范如下所示。
参数 最小值 类型 最大值 单位
电压模式下的输入电压 -0.5 - 26 V
0V 至 10V 电流范围内的输入电阻 - 10.7 - k
Ω
分辨力 - 12 - 位
电流模式下的输入电压 -0.5 - 5.0 V
电流模式下的输入电流 -2.5 - 25 mA
4mA 至 20mA 电流范围内的输入电阻 - 182 188
Ω
分辨力 - 12 - 位
下面的章节中举出了两个关于如何使用模拟输入的示例。
小心
1. 在电流模式下,模拟输入没有提供过电压保护。超过电气规范中的极限
可能导致输入端永久损坏。
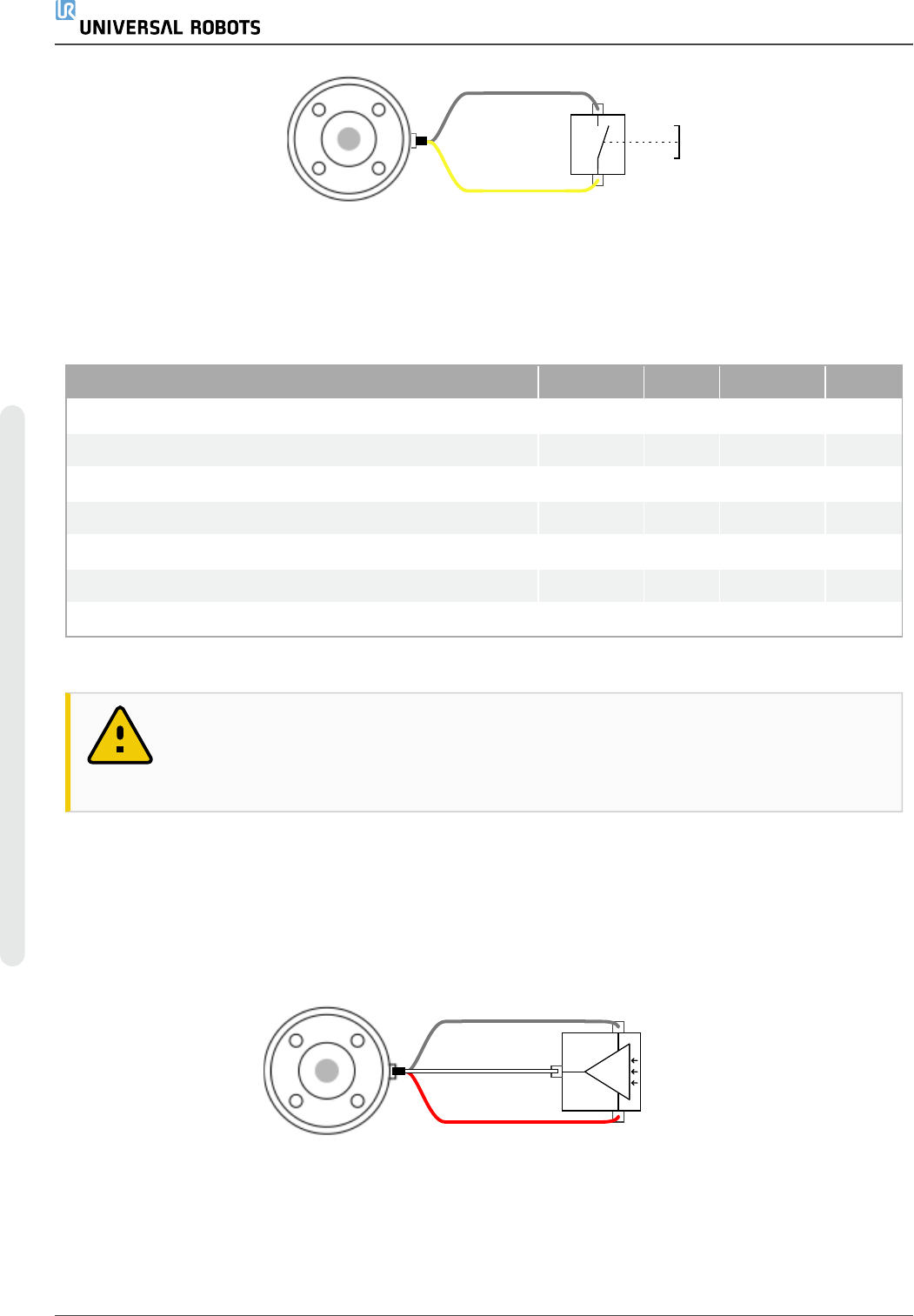
使 用 工 具 模 拟 输 入 ,非 差 分
本例显示了带有非差分输出的模拟传感器连接。只要模拟输入的输入模式设置与 I/O 选项卡
中的设置相同,那么传感器的输出端可设置为电流模式,也可设置为电压模式。
注意:可以检查并确保带有电压输出端的传感器可以驱动工具的内部电阻,否则测量值可能
无效。
GND
POWER
AI8
AI2
UR5e 46 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
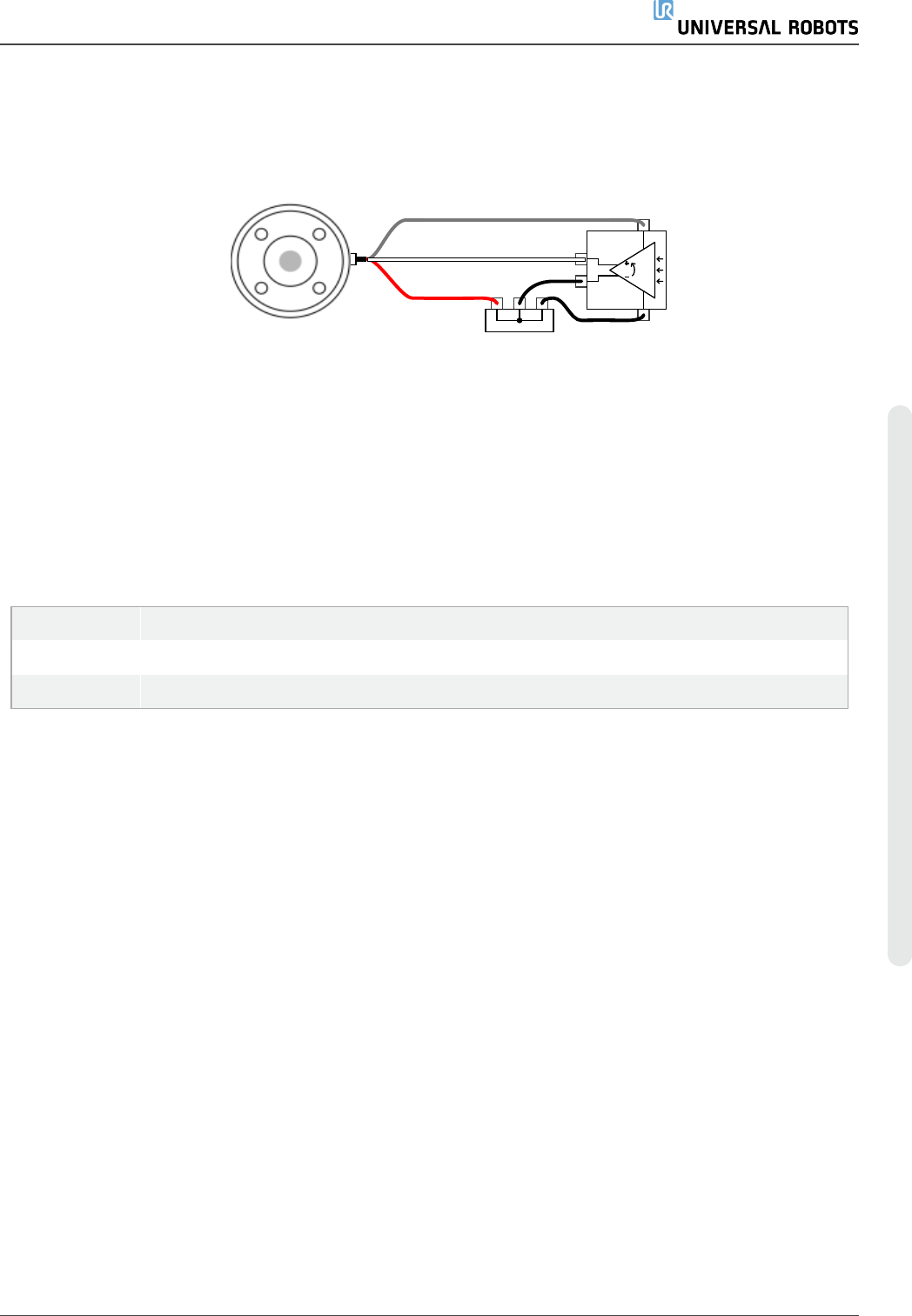
使 用 工 具 模 拟 输 入 ,差 分
本例显示了带有差分输出的模拟传感器连接。将负输出端连接至 GND (0V),即可像非差分传
感器一样工作。
POWER
AI8
GND
AI2
6.8.7. 工具通信 I/O
• 信号请求 RS485 信号使用内部自动防故障偏置。如果连接的设备不支持该自动防故障
功能,则信号偏置必须在连接的工具中完成,或者通过在 RS485 + 处添加上拉电阻器和
在 RS485- 处添加下拉电阻器来外置添加。
• 延迟 从在 PC 上写入消息到消息在 RS485 上开始,通过工具连接器发送的消息的延迟
时间范围是 2ms 到 4ms。缓冲器存储发送到工具连接器的数据,直到线路空闲。一旦接
收到 1000 字节的数据,消息就写入设备。
波特率 9.6k、19.2k、38.4k、57.6k、115.2k、1M、2M、5M
停止位 1, 2
同位 无、奇、偶
用 户 手 册 47 UR5e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
7.维护和维修
根据本手册中的所有安全说明执行任何目视或工作环境检查。
按照支持网站 (http://www.universal-robots.com/support) 上最新版本的服务手册执行所有维护、
检查、校准和维修工作。
维修工作只能由 Universal Robots 或授权的系统集成商完成。由客户指定、经过培训的个人也
可以进行维修,前提是他们要遵守本服务手册中提及的检查计划。请参阅服务手册第 5 章,了
解适用于经培训的个人的完整检查计划
零件退回给 Universal Robots 时应按服务手册中的条款规定进行操作。
7.1. 安全指示
维护维修后,必须进行核对以确保服务要求的安全级别。检查必须遵守有效的国家或地区工
作安全规定。同时应检测所有安全功能是否都正常。
维护维修工作的目的是为了确保系统正常运转,或在故障状态时,帮助系统恢复正常运转状
态。维修包括故障诊断和实际的维修。
在机器人手臂或控制箱上工作时,必须遵守以下程序和警告。
警告
1. 请勿更改软件安全配置中的任何信息( 例如,力限值) 。安全配置在
PolyScope 手册中有介绍。如果安全参数变更,整个机器人系统应被视为
新系统,这就意味着所有安全审核过程,比如风险评估,都必须更新。
2. 使用部件号相同的新部件或 Universal Robots 批准的相当部件替换故障部
件。
3. 该工作完成后立即重新激活所有禁用的安全措施。
4. 书面记录所有维修操作,并将其保存在整个机器人系统相关的j技术文档
中。
警告
1. 从控制箱底部移除主输入电缆以确保其完全断电。断开机器人手臂或控
制箱连接的其他能源。采取必要的预防措施以避免其他人在维修期间重
新接通系统能源。
2. 重新开启系统前请检查接地连接。
3. 拆分机器人手臂或控制箱时请遵守 ESD 法规。
4. 避免拆分控制箱内的供电系统。控制箱关闭后其供电系统仍可留存高压
( 高达 600V) 达数小时。
5. 避免水或粉尘进入机器人手臂或控制箱。
UR5e 48 用 户 手 册
7.维 护和 维修
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。