99419_UR5e_User_Manual_zh_Global.pdf - 第205页
25 . 5 . I/ O 设 置 在 “ I/O 设 置 ” 屏 幕 上 , 用 户 可 以 使 用 I/O 选 项 卡 控 件 定 义 I/O 信 号 并 配 置 动 作 。 I/O 信 号 类 型 列 在 输 入 和 输 出 下 。 您 可 以 使 用 现 场 总 线 ( 如 P rofi net 和 以 太 网 /IP) 访 问 通 用 寄 存 器 。 如 果 启 用 工 具 通 信 接 口 ( TCI) , 则 工 具 模 拟…
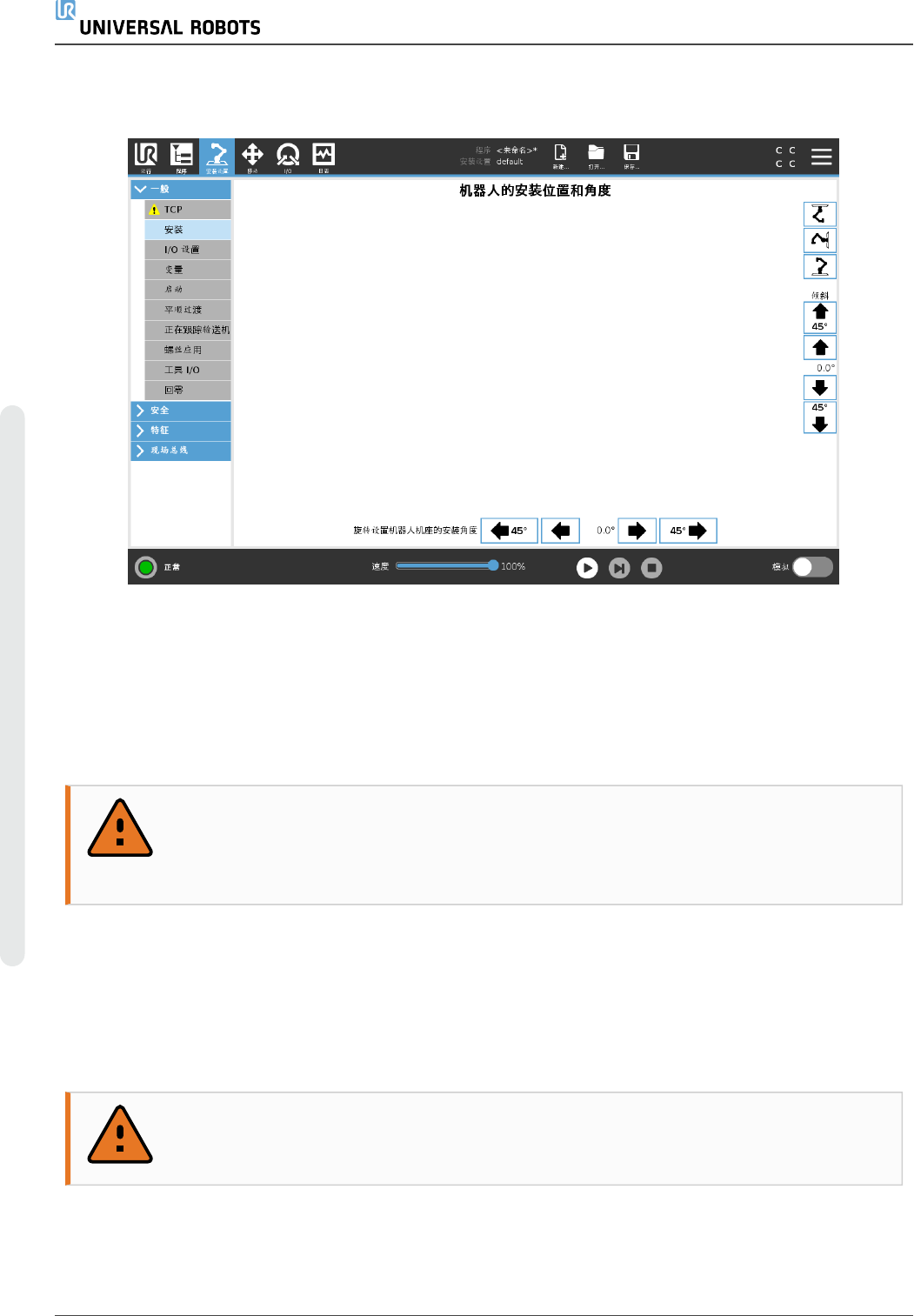
25.4. 安装
指定机器手臂的安装有两个目的:
1. 在屏幕上正确显示机械手臂。
2. 告知控制器重力方向。
高级动力学模型可确保机器人手臂平稳精确地运动,并使机器人手臂能够将其自身保持在自
由驱动模式。为此,机械手臂的安装务必设置正确,这一点至关重要。
警告
如果没有正确安装机器人手臂,则可能导致频繁的保护性停止,并且/或者按自
由驱动按钮时,机器人手臂会移动。
如果机器手臂安装在平稳的台面或地面上,无需对此屏幕进行任何更改。但是,如果机器人手
臂采用吊顶式安装、壁挂式安装或呈一定角度安装,则需使用按钮对其进行调整。
屏幕右侧的按钮可用于设置机器人手臂的安装角度。右上角的三个按钮可将角度设置为吊顶
(180
∘
)、墙壁 (90
∘
)、地面 (0
∘
)。倾斜按钮可设置任意角度。
屏幕底部的按钮用于旋转机器手臂的安装角度,以与实际安装角度保持一致。
警告
使用正确的安装设置。用程序保存并加载安装文件。
UR5e 190 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
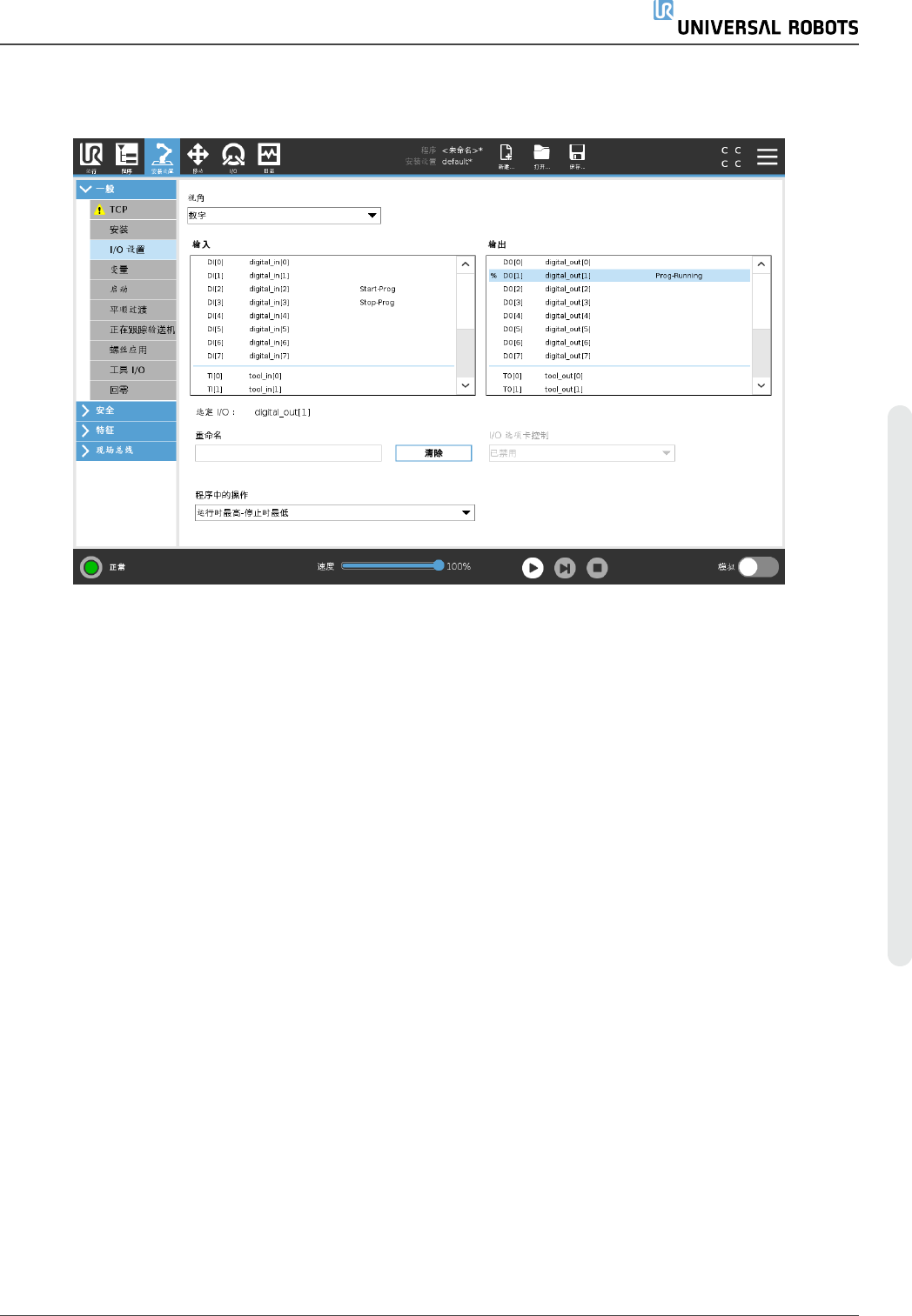
25.5. I/O 设置
在“I/O 设置”屏幕上,用户可以使用 I/O 选项卡控件定义 I/O 信号并配置动作。I/O 信号类型列在
输入和输出下。
您可以使用现场总线( 如 Profinet 和以太网/IP) 访问通用寄存器。
如果启用工具通信接口 (TCI),则工具模拟输入将不可用。
25.5.1. I/O 信号类型
要限制在输入和输出下列出的信号数量,请使用视图下拉菜单根据信号类型更改显示的内
容。
25.5.2. 指定用户定义的名称
您可以对输入和输出信号进行命名,以便轻松识别正在使用的信号。
1. 选择所需的信号.
2. 点按文本字段以键入信号的名称。
3. 要将名称重置为默认名称,请点按清除。
您必须为通用寄存器提供用户定义的名称,以便可在程序中使用( 即,对于Wait 命令或 If 命令
的条件表达式) 。
Wait 和 If 命令分别在24.10.8. 等待 在本页149和24.11.2. If在本页153中介绍。您可以在表达式
编辑器屏幕上的输入或输出选择器中找到命名的通用寄存器。
用 户 手 册 191 UR5e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
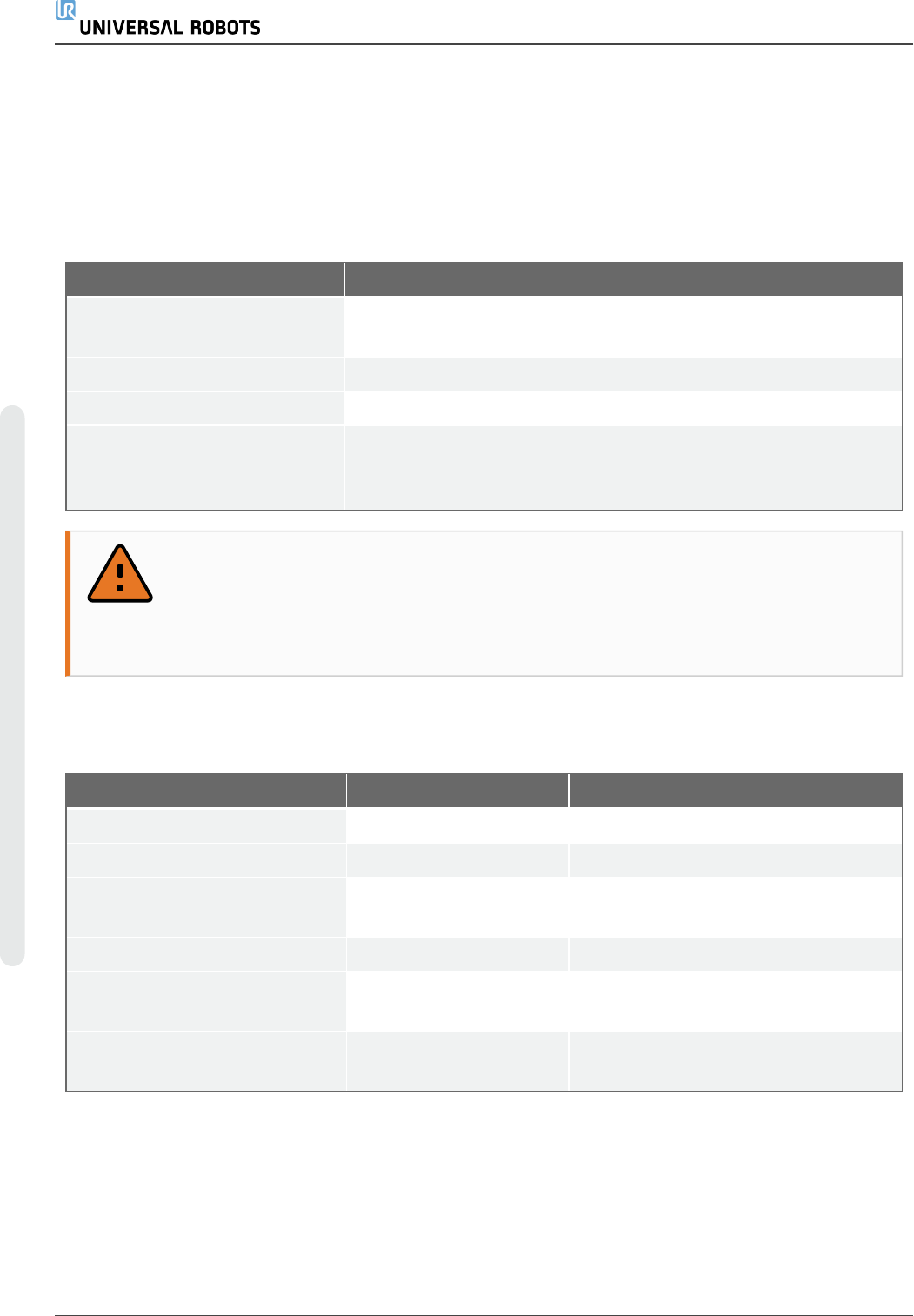
25.5.3. I/O 操作和 I/O 选项卡控件
输 入 和 输 出 操 作
您可以使用物理和现场总线数字 I/O 来触发动作或对程序状态做出反应。
可用的输入操作:
输入 操作:
启动 在上升沿启动或恢复当前程序( 仅在远程控制中启用,请参
阅30.4.5. 远程控制 在本页234)
停止 在上升沿停止当前程序
暂停 在上升沿暂停当前程序
自由驱动 当输入为高电平时,机器人将进入自由驱动状态( 类似于按
下“自由驱动”按钮) 。
如果其他条件不允许自由驱动,则忽略输入。
警告
如果在使用“开始”输入操作时机器人停止,则机器人会在执行该程序之前缓慢
移动到程序的第一个路径点。如果在使用“开始”输入操作时机器人暂停,则机
器人会在恢复该程序之前缓慢移动到暂停的位置。
可用的输出操作:
操作: 输出状态 程序状态
未运行时最低 低 停止或暂停
未运行时最高 高 停止或暂停
运行时为高电平,停止时为
低电平
低
高
正在运行
停止或暂停
临时停止时为“低” 低 程序计划外终止
临时停止时为“低”,否则为
“高”
低
高
程序计划外终止
运行、停止或暂停
连续脉冲 在高电平和低电平之
间交替
运行( 暂停或停止程序以保持脉冲
状态)
UR5e 192 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。