99419_UR5e_User_Manual_zh_Global.pdf - 第46页
*3.5A 持 续 50 0ms 或 3 3% 占 空 比 。 数 字 I/O 的 构 建 遵 循 IE C 61 131 -2 。 电 气 规 范 如 下 所 示 。 终 端 参 数 最 小 值 类型 最 大 值 单 位 数 字 输 出 [C Ox / DO x] 电 流 * 0 - 1 A [C Ox / DO x] 电 压 降 0 - 0.5 V [C Ox / DO x] 漏 电 流 0 - 0.1 mA [C Ox / DO …
黄色,含红色文本 专用安全信号
黄色,含黑色文本 可进行安全配置
灰色,含黑色文本 通用数字 I/O
绿色,含黑色文本 通用模拟 I/O
在 GUI 中,可以将可配置 I/O 设置为安全 I/O 或通用 I/O( 请参阅第 II 部分PolyScope 手册 在本
页87) 。
6.4.1. 所有数字 I/O 的通用规范
本节阐述了控制箱的下列 24V 数字 I/O 的电气规范。
• 安全 I/O。
• 可配置 I/O。
• 通用 I/O。
根据所有三个输入都相同的电气规范安装机器人。
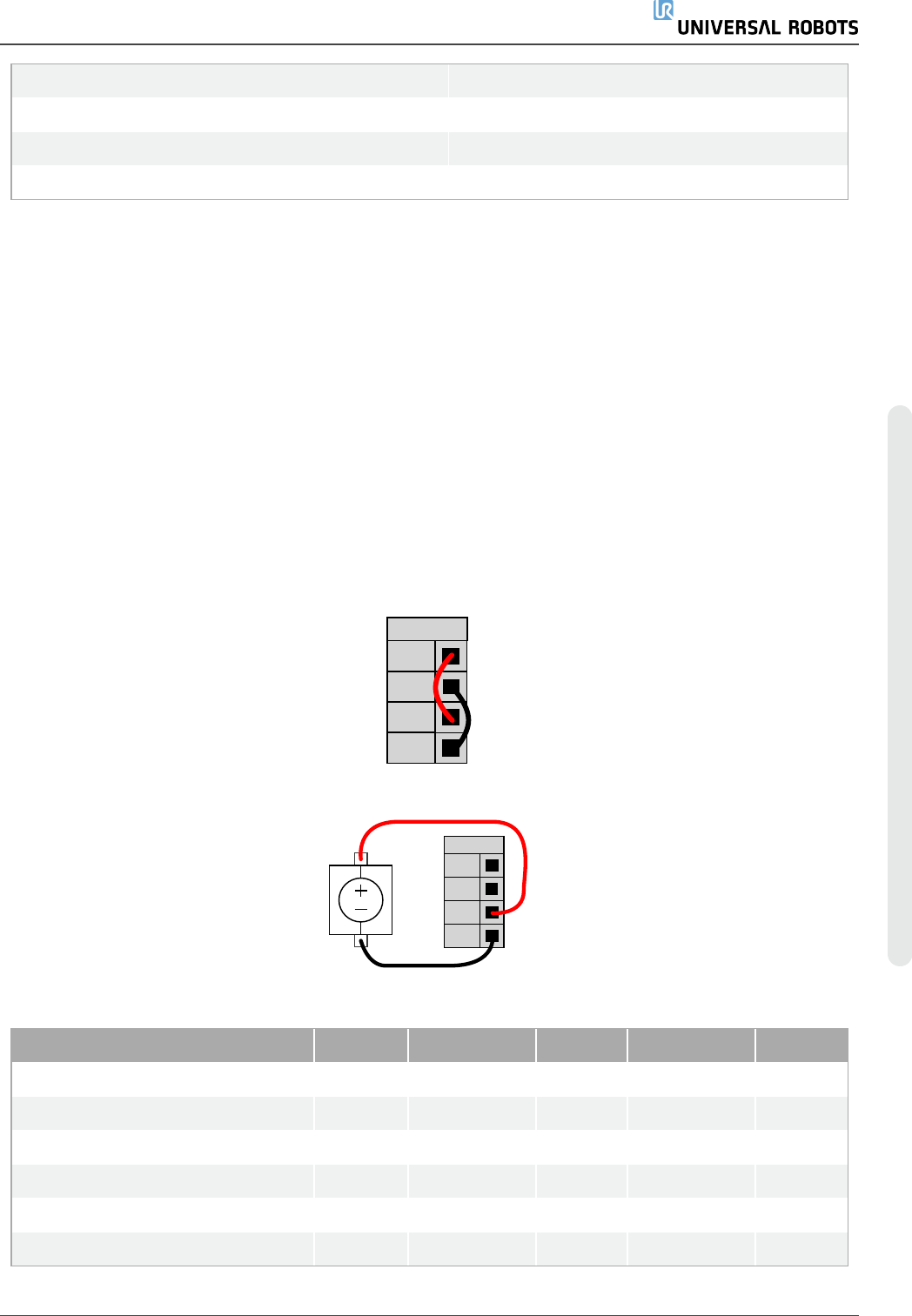
数字 I/O 既可由内部 24V 电源供电,也可通过配置电源接线盒由外部电源供电。终端盒由四个
终端组成。上面两个( PWR 和 GND) 为 24V,内部的 24V 电源接地。接线盒下部的两个端子
( 24V 和 0V) 是为 I/O 供电的 24V 输入。默认配置为使用内部电源,请参见下图。
24V
0V
PWR
GND
Power
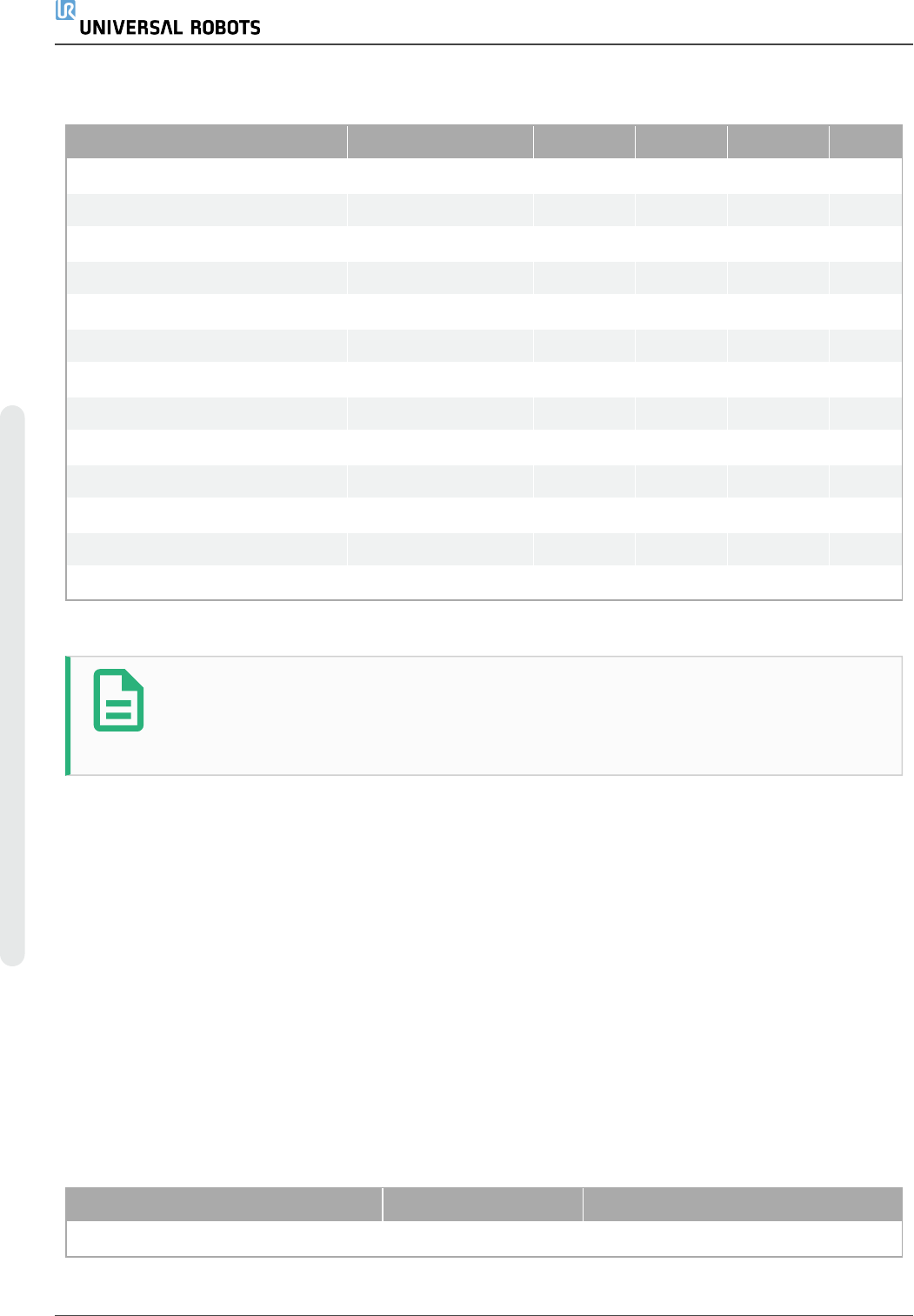
如果需要更大的电流,可如下图所示连接外部电源。
24V
0V
PWR
GND
Power
内部和外部电源的电气规范如下所示。
终端 参数 最小值 类型 最大值 单位
内置 24V 电源
[PWR - GND]
电压 23 24 25 V
[PWR - GND]
电流 0 - 2* A
外部 24V 输入要求
[24V - 0V]
电压 20 24 29 V
[24V - 0V]
电流 0 - 6 A
用 户 手 册 31 UR5e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
*3.5A 持续 500ms 或 33% 占空比。
数字 I/O 的构建遵循 IEC 61131-2。电气规范如下所示。
终端 参数 最小值 类型 最大值 单位
数字输出
[COx / DOx]
电流* 0 - 1 A
[COx / DOx]
电压降 0 - 0.5 V
[COx / DOx]
漏电流 0 - 0.1 mA
[COx / DOx]
功能 - PNP - 类型
[COx / DOx]
IEC 61131-2 - 1A - 类型
数字输入
[EIx/SIx/CIx/DIx]
电压 -3 - 30 V
[EIx/SIx/CIx/DIx]
OFF 区域 -3 - 5 V
[EIx/SIx/CIx/DIx]
ON 区域 11 - 30 V
[EIx/SIx/CIx/DIx]
电流 ( 11-30V) 2 - 15 mA
[EIx/SIx/CIx/DIx]
功能 - PNP + - 类型
[EIx/SIx/CIx/DIx]
IEC 61131-2 - 3 - 类型
*对于最大 1H 的电阻负载或电感性负载。
提示
可配置一词用于可配置为安全 I/O 或普通 I/O 的 I/O。这些是带黑色文字的黄色
端子。
6.4.2. 安全 I/O
本节将介绍专用安全输入( 带红色文字的黄色端子) 和配置为安全 I/O 时的可配置 I/O( 带黑色
文字的黄色端子) 。遵守6.4.1. 所有数字 I/O 的通用规范 上一页一节中关于所有数字 I/O 的通用
规范。
安全装置和设备必须按照2.安全 在本页7一章中的安全说明和风险评估进行安装。
所有安全 I/O 成对存在( 冗余) ,并且必须保留成两个独立的分支。单一故障不会导致丧失安全
功能。
有两种固定的安全输入:
• 机器人紧急停止仅用于紧急停止设备
• 防护停止用于保护设备
功能差异如下所示。
紧急停机 防护停止
机器人停止运动 是 是
UR5e 32 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
紧急停机 防护停止
程序执行 暂停 暂停
驱动电源 关 开
重置 手动 自动或手动
使用频率 不常使用 不超过每运行周期一次
需要重新初始化 仅释放制动器 否
停机类别 (IEC60204-1) 1 2
监控功能的
性能等级 (ISO 13849-1) PLd PLd
使用可配置的 I/O 设置紧急停止输出等其他安全 I/O 功能。有关如何通过 GUI 为安全功能配置
一组可配置的 I/O,请参阅第 II 部分PolyScope 手册 在本页87。
警告
1. 切勿将安全信号连接到安全等级不合适的非安全型 PLC。如果不遵守该
警告,有可能会造成严重的人员伤亡,因为安全功能有可能失效。务必将
安全接口信号与普通 I/O 接口信号分开。
2. 所有安全型 I/O 均具备冗余性( 两个独立通道) 。保持两个通道独立,可确
保在发生单一故障时不会丧失安全功能。
3. 在将机器人投入使用前,务必检验安全功能。必须定期测试安全功能。
4. 机器人的安装需遵循这些规格。如果不遵循这些规格,有可能会造成严
重的人员伤亡,因为安全功能有可能失效。
OSSD 信 号
过滤所有配置和永久安全输入,以允许使用脉冲长度小于3ms的OSSD安全设备。安全输入每
毫秒采样一次,输入状态由最近7毫秒内最常见的输入信号决定。安全输出的 OSSD 脉冲在第
II 部分PolyScope 手册 在本页87中进行了详细说明。
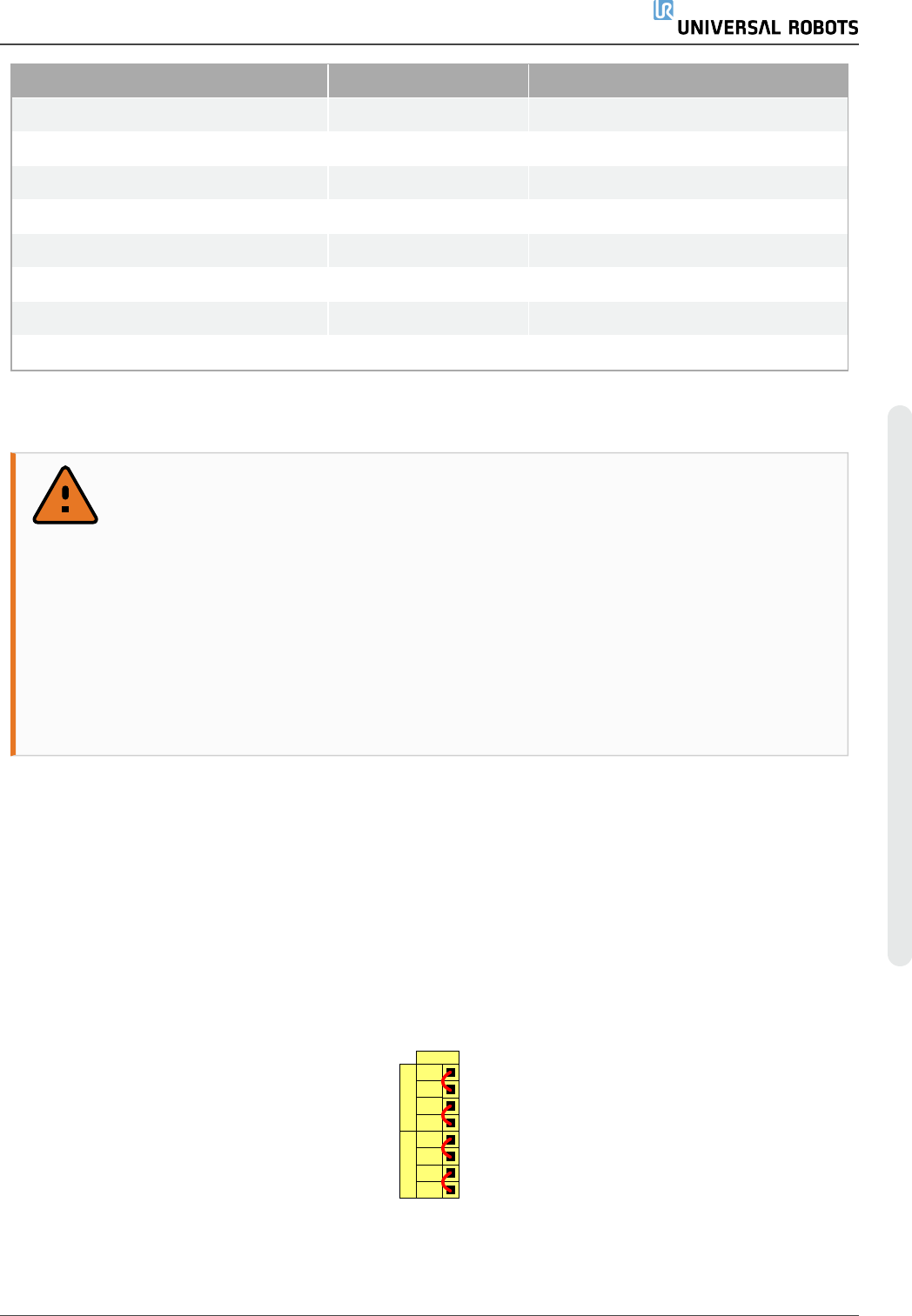
默 认 安 全 配 置
所交付的机器人进行了默认配置,可在没有任何附加安全设备的情况下进行操作,请参阅下
图。
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
用 户 手 册 33 UR5e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。