99419_UR5e_User_Manual_zh_Global.pdf - 第36页
U R5e 2 2 用 户 手 册 4 . 运 输 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
4.运输
如托盘上提供的那样,机器人和控制箱已作为成套设备校准。请勿将它们分开,那样将需要重
新校准。
只能将机器人放在原包装中运输。如果今后要搬运机器人的话,请将包装材料保存在干燥处。
将机器人从包装移动到安装空间时,同时托住机器人手臂的两根管。扶住机器人直至机器人
机座的所有安装螺栓全部紧固好。
通过手柄抬升控制箱。
警告
1. 确保抬升设备时,背部或其他身体部位不过分负重。使用适当的抬升设
备。应遵守所有地区性和国家性的抬升指南。通用机器人不对设备运输
造成的任何损坏负责。
2. 确保按照5.机械接口 在本页23一章中的安装说明安装机器人。
用 户 手 册 21 UR5e
4.运 输
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5e 22 用 户 手 册
4.运 输
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
5.机械接口
5.1. 前言
本章将介绍安装机器人系统的部件时应注意的基本事项。务必遵守一章中的电气安装说明。
5.2. 机器人工作空间
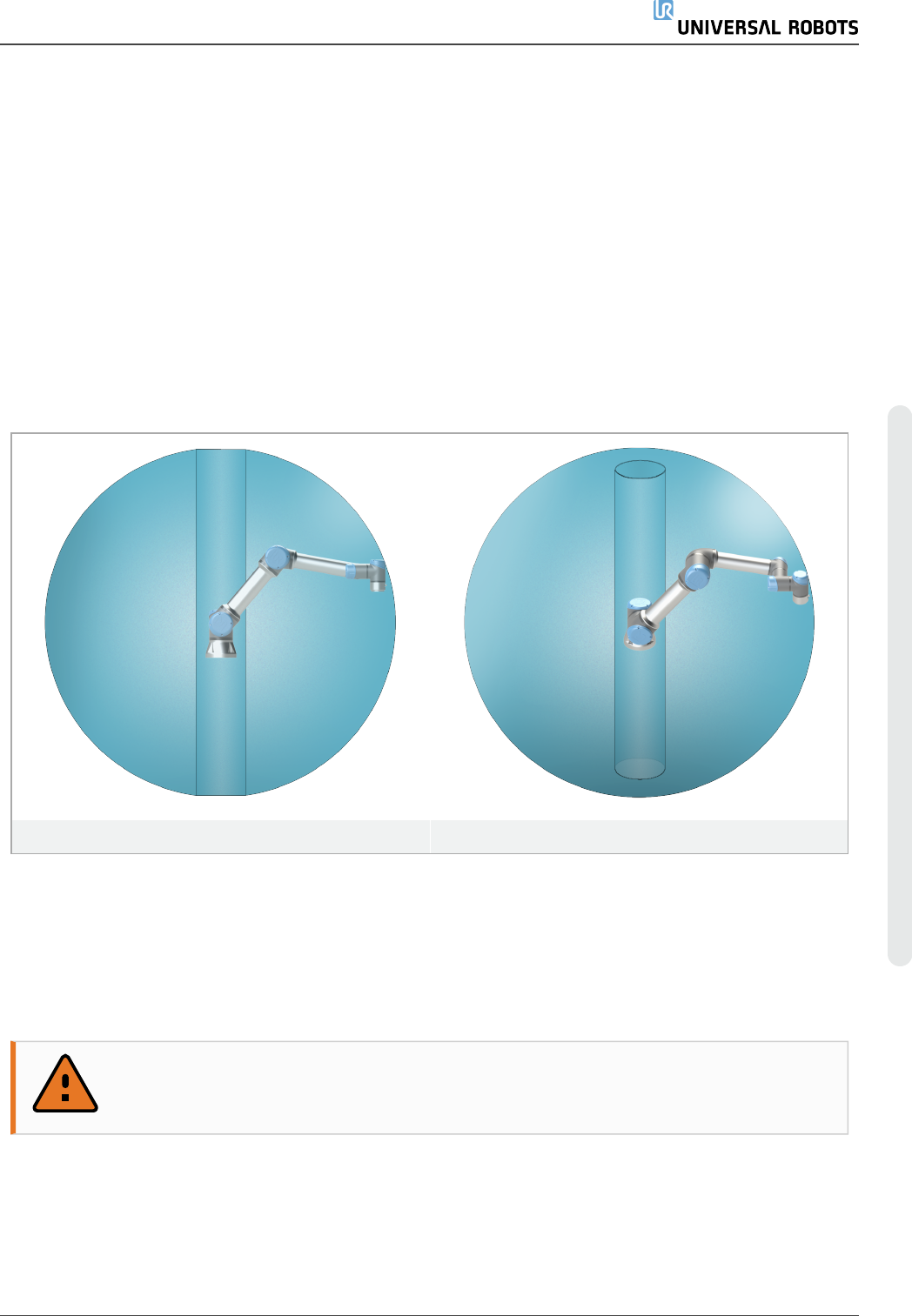
机器人的工作空间是指机座关节周围 850 mm 范围内的区域。选择机器人安装位置时,务必考
虑机器人正上方和正下方的圆柱体空间。应避免将工具移向圆柱体空间,因为这样会造成工
具慢速运动时关节却运动过快,从而导致机器人工作效率低下,风险评估难以进行。
正面 倾斜
5.3. 安装
机 器 人 手 臂
使用四颗 8.8 级强度的 M8 螺栓和机座上的四个 8.5mm 安装孔来安装机器人手臂。
警告
确保机器手臂正确并安全地安装到位。安装不稳定会导致事故。
固 定 机 器 人 手 臂
图 6.1 显示了钻孔位置和螺丝安装位置。也可采购精确的基座作为附件来使用。
用 户 手 册 23 UR5e
5.机 械接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。