99419_UR5e_User_Manual_zh_Global.pdf - 第181页
当 码 垛 高 度 超 出 所 定 义 的 数 值 时 , 或 者 传 感 器 发 送 信 号 时 , 表 示 码 垛 操 作 完 成 。 卸 垛 卸 垛 过 程 中 , 机 器 人 手 臂 从 A 点 沿 着 指 定 方 向 移 动 , 搜 索 下 一 工 件 。 屏 幕 上 的 条 件 决 定 何 时 到 达 下 一 工 件 。 当 条 件 满 足 时 , 机 器 人 会 记 住 位 置 并 执 行 特 殊 序 列 。 在 后 续 …
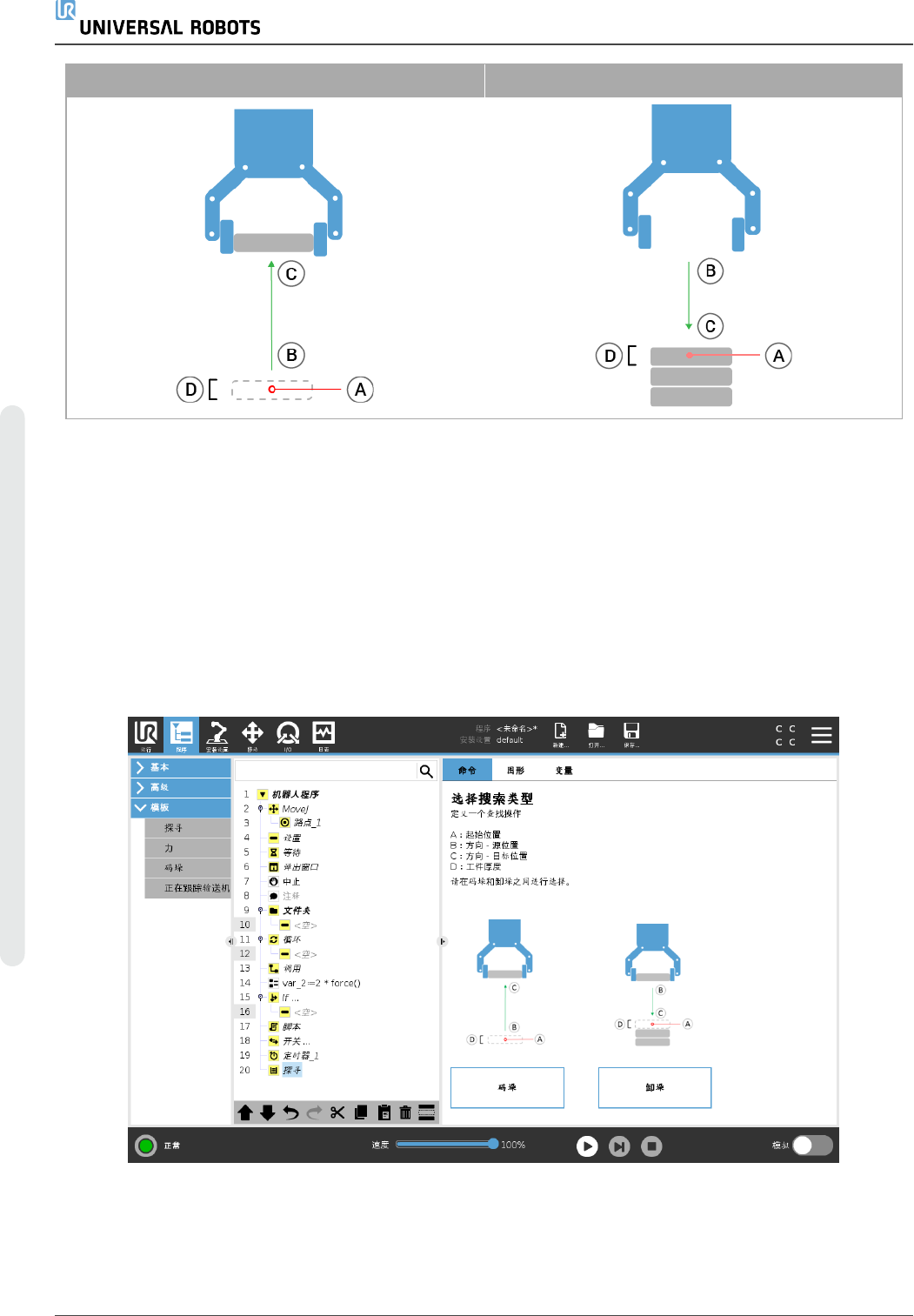
码垛 卸垛
要为查找操作编程,请定义以下内容:
•
A
- 起点。
•
B 到 C
- 码垛方向。这意味着码垛时增加堆垛,卸垛时减少堆垛。
•
D
- 码垛工件的厚度。
您还必须定义到达下一个码垛位置的条件,以及在每个码垛位置执行的特殊程序序列。
必须给出码垛操作中所涉及的运动的速度和加速度。
码 垛
码垛过程中,机器人手臂将移至
A
,然后
反
向移动以搜索下一个码垛位置。当找到下一个码垛
位置时,机器人会记住位置并执行特殊序列。
在后续的轮次中,机器人从记住的位置开始搜索,并沿方向增加工件的厚度。
UR5e 166 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
当码垛高度超出所定义的数值时,或者传感器发送信号时,表示码垛操作完成。
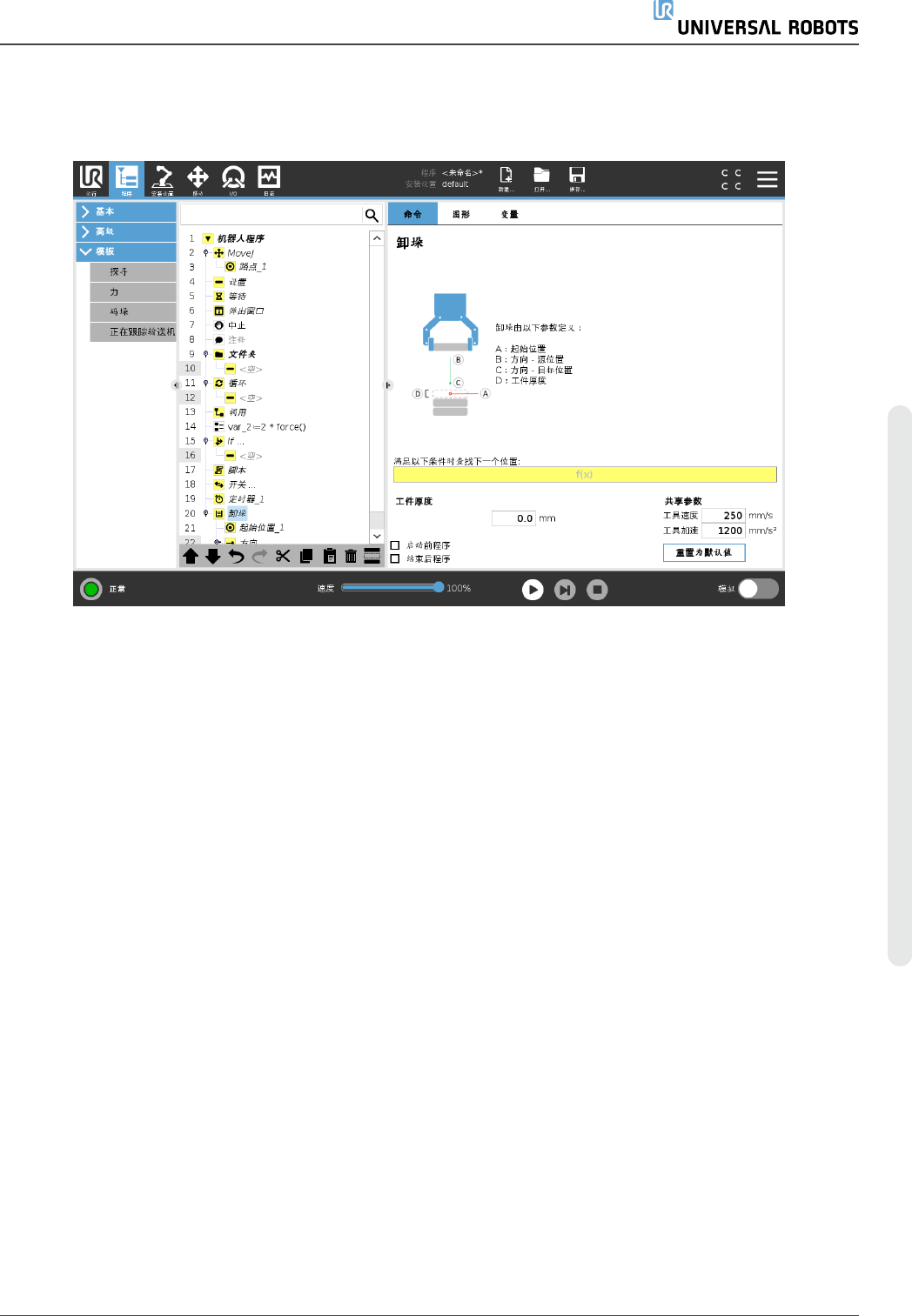
卸 垛
卸垛过程中,机器人手臂从
A
点沿着指定方向移动,搜索下一工件。屏幕上的条件决定何时到
达下一工件。当条件满足时,机器人会记住位置并执行特殊序列。
在后续的轮次中,机器人从记住的位置开始搜索,并沿方向增加工件的厚度。
起 始 位 置
起始位置是指开始执行堆垛操作的位置。如果省略了起始位置,则码垛操作将从机器人手臂
的当前位置开始。
用 户 手 册 167 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
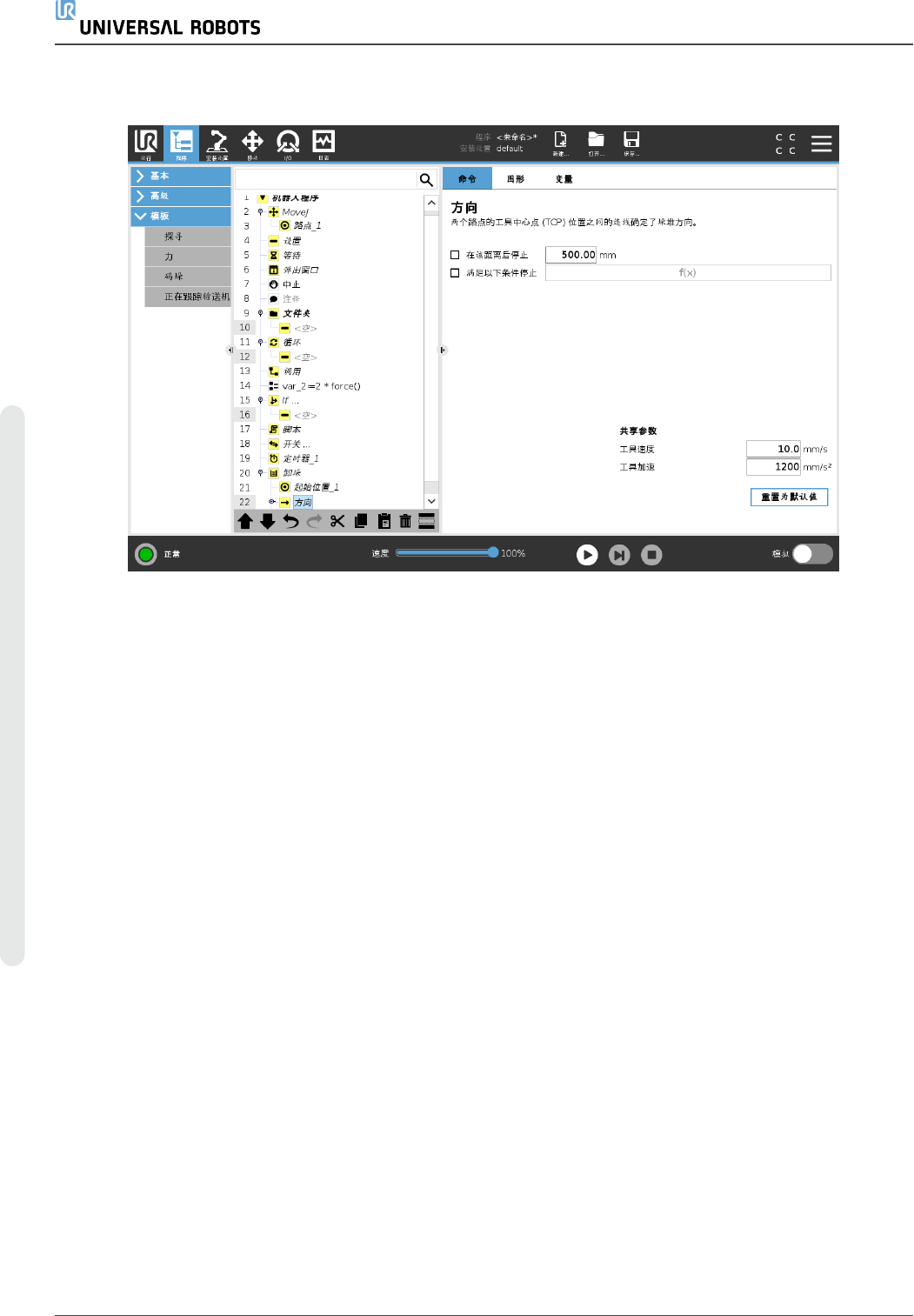
方 向
方向由位置
B 到 C
给定,根据从
B
的 TCP 到
C
的 TCP 的位置差计算得出。
方向不考虑点的朝向。
下 一 个 码 垛 位 置 表 达 式
机器人手臂沿着方向矢量移动,同时不断判断是否已到达下一个堆垛位置。当表达式被评估
为 True 时,将执行特殊序列。
“开 始 前 ”
可选的BeforeStart序列在操作开始之前运行。这可用于等待信号就绪。
“结 束 后 ”
可选的AfterEnd序列在操作完成之后运行。这可用于向输送机发送开始运动信号,以为下一
个堆垛做好准备。
拾 取 /放 置 序 列
拾取/放置序列是在每个码垛位置执行的一个特殊程序序列,与码垛操作。
UR5e 168 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。