99419_UR5e_User_Manual_zh_Global.pdf - 第156页
条 件 交 融 轨 迹 交 融 轨 迹 受 设 置 交 融 半 径 的 路 点 以 及 程 序 树 中 的 下 一 个 路 点 影 响 。 也 就 是 说 , 在 图 12. 5 的 程 序 中 , 围 绕 ( WP_ 1) 的 交 融 受 ( WP_ 2) 影 响 。 在 本 例 中 , 当 围 绕 ( WP_ 2) 交 融 时 , 其 结 果 变 得 更 显 而 易 见 。 有 两 个 可 能 的 结 束 位 置 , 为 了 确 定…
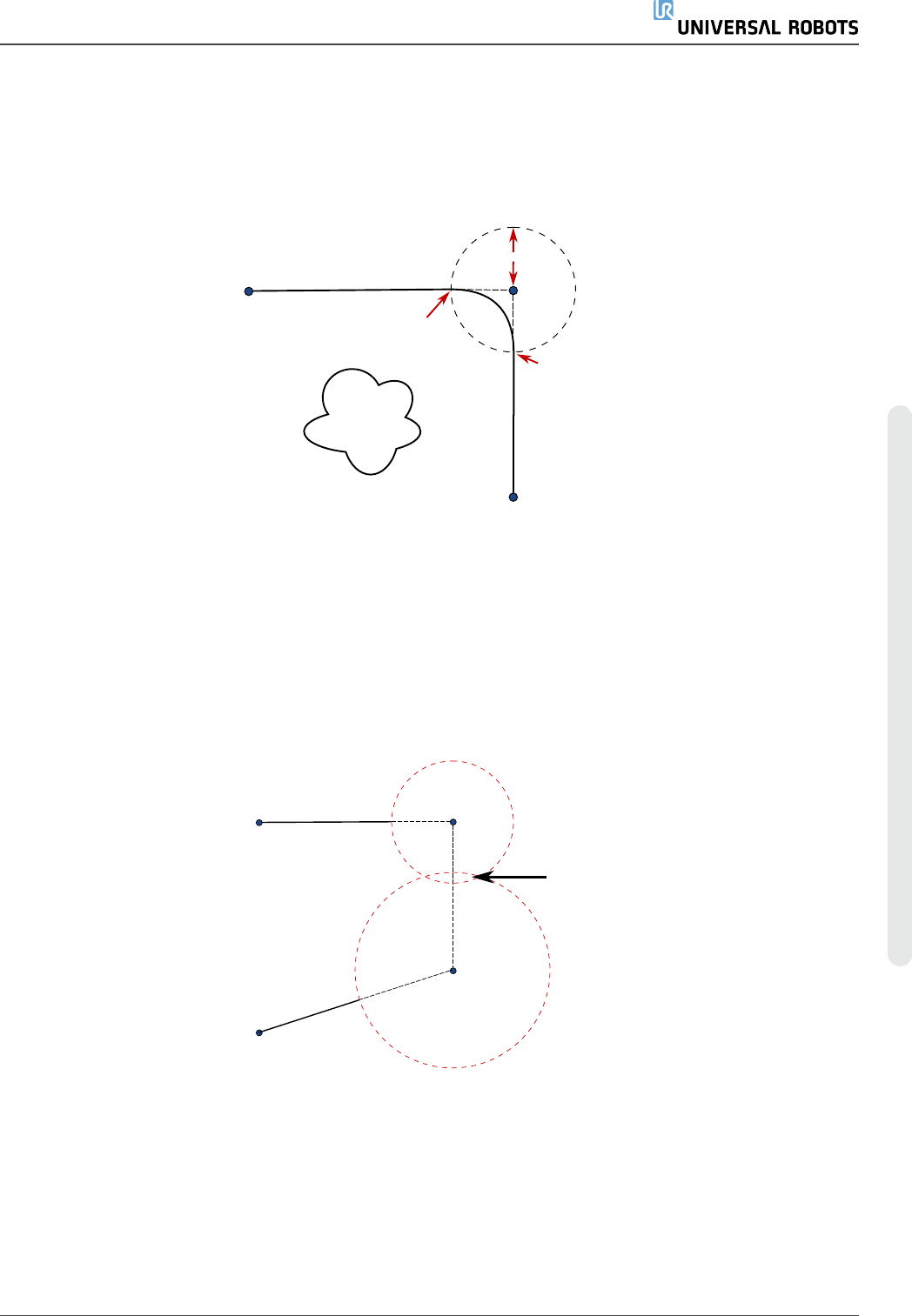
• 交融半径 (r )
• 机器人的初始速度和最终速度( 分别位于 p1 和 p2 位置)
• 移动时间( 例如:若为轨迹设置一个具体时间,将影响机器人的初始/最终速度)
• 交融起始和结束的轨迹类型 (MoveL, MoveJ)
r
WP_1
WP_2
WP_3
p1
p2
O
12.3:
在
(WP_2)
上方交融的半径为
r
,初始交融位置为
p1
,最后交融位置为
p2
。
(O)
是障
碍物。
如果设置了交融半径,机器手臂轨迹即会绕过路点从其周围经过,以使机器手臂不会停在该
点。
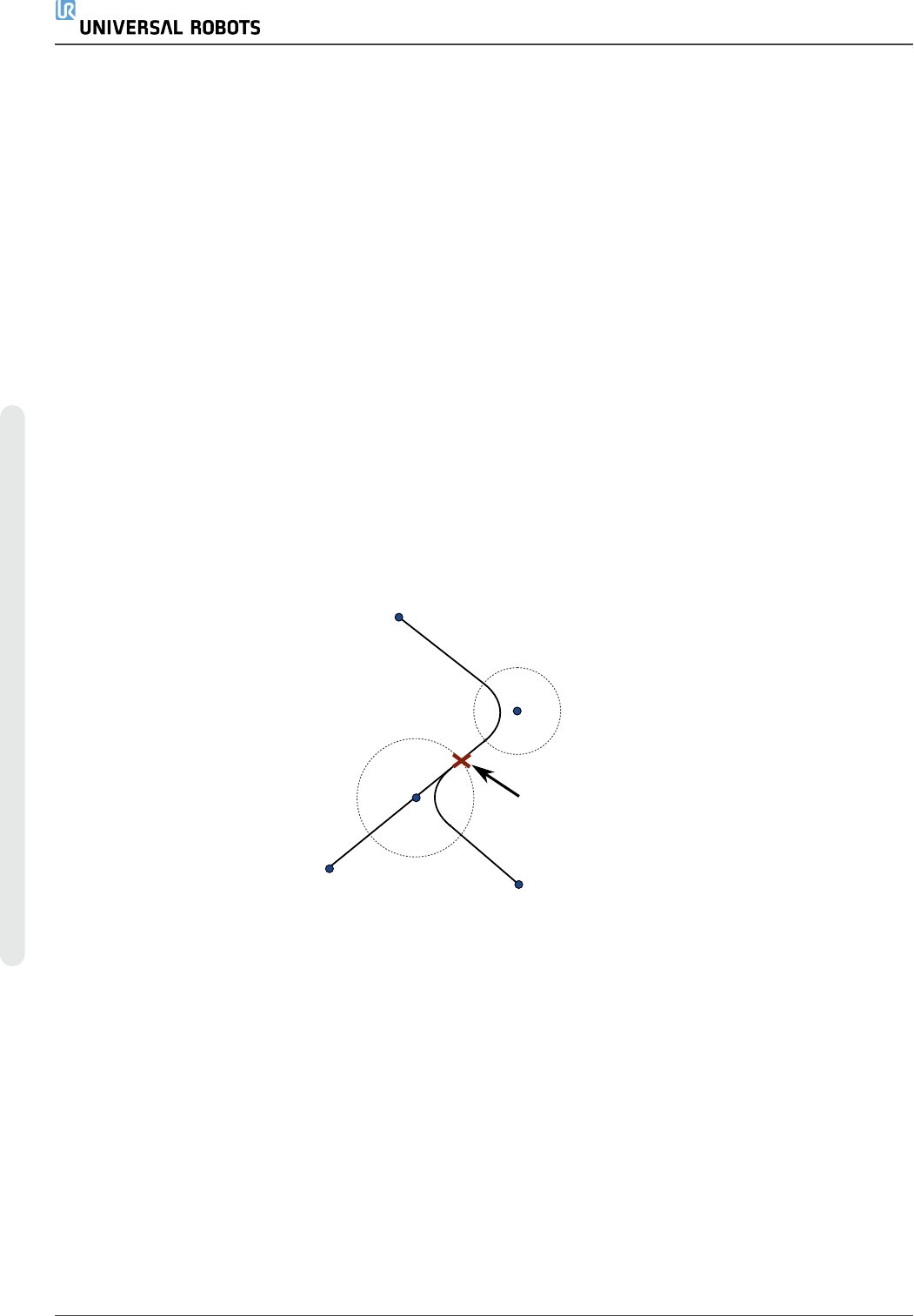
交融不能重叠,因此不能设置一个与上一路点或下一路点的交融半径重叠的交融半径,如图
12.4 所示。
WP_1
WP_2
WP_3
WP_4
*
12.4:
不允许交融半径重叠 (*)。
用 户 手 册 141 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
条 件 交 融 轨 迹
交融轨迹受设置交融半径的路点以及程序树中的下一个路点影响。也就是说,在图 12.5 的程
序中,围绕 (WP_1) 的交融受 (WP_2) 影响。在本例中,当围绕 (WP_2) 交融时,其结果变得更
显而易见。
有两个可能的结束位置,为了确定下一个要交融的路点,机器人必须在输入交融半径时评估
digital_input[1] 的当前读数。
这意味着 if…then 表达式( 或确定下一个路点( 如可变路点) 的其他必要语句) 会在我们实际到
达 (WP_2) 之前进行评估,这在查看程序序列时有点违反直觉。如果某个路点是一个停止点,
后接判断下一个路点的条件表达式( 如:I/O 命令) ,当机器手臂停在该路点时执行该表达式。
MoveL
WP_I
WP_1 (blend)
WP_2 (blend)
if (digital_input[1]) then
WP_F_1
else
WP_F_2
WP_I
WP_1
WP_2
WP_F_1
WP_F_2
*
12.5:WP_I
为初始路点,有两个潜在最终路点
WP_F_1
和
WP_F_2
,具体取决于条件表达
式。当机器人手臂进入第二个交融 (*) 时,将评估
if
条件表达式。
UR5e 142 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
交 融 轨 迹
WP_1
WP_2
WP_3
WP_1
WP_2
WP_3
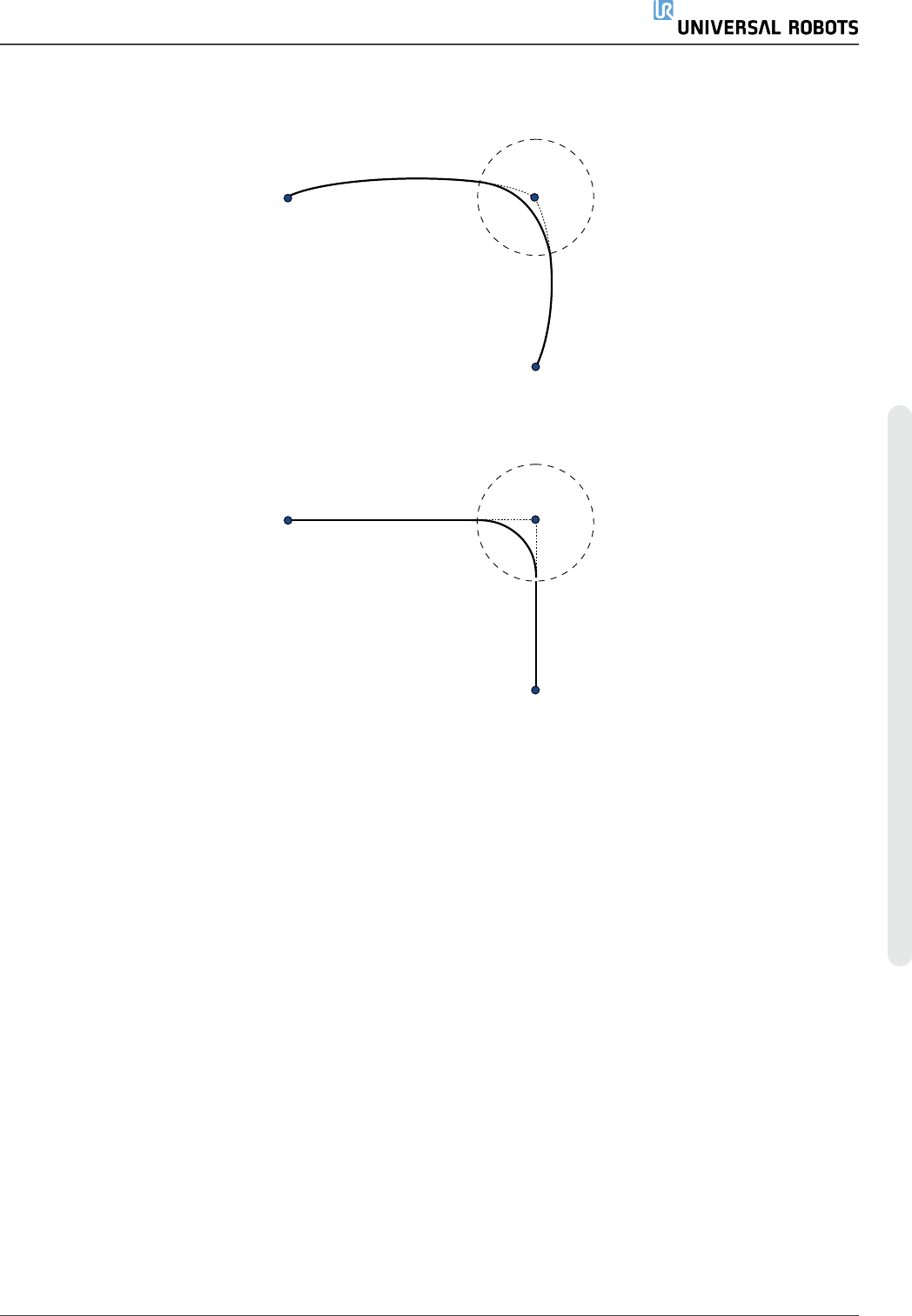
12.6:
关节空间 (MoveJ) 与笛卡尔空间 (MoveL) 运动和交融。
根据移动类型( 即 MoveL、MoveJ 或 MoveP) 生成不同的交融轨迹。
• MoveP 中的交融 在 MoveP 中交融时,交融的位置以恒定速度遵循圆弧路径。方向与两
条轨迹之间的平滑插值交融。您可以交融 MoveJ 或 MoveL 到 MoveP 内。在这种情况下,
机器人使用 MoveP 的圆弧交融,并插入两个运动的速度。您不可以交融 MoveP 到 MoveJ
或 MoveL 内。相反,MoveP 的最后一个路点被视为没有交融的停止点。如果两条轨迹处
于接近 180 度( 反向) 的角度,则无法执行交融,因为它会创建一个半径非常小的圆弧,
机器人无法以恒定速度遵循。这会导致程序中的运行时异常,这种情况可通过调整路点
来纠正,以形成一个不太尖锐的角。
• 涉及 MoveJ 的交融 MoveJ 交融会在关节空间生成一条平滑的曲线。这适用于从 MoveJ
到 MoveJ、MoveJ 到 MoveL 和 MoveL 到 MoveJ 的交融。与没有交融的移动相比,交融会
产生更加平滑和更快的轨迹( (see Figure 15.6)) 。如果使用速度和加速度来指定速
度曲线,则在交融过程中,交融保持在交融半径内。如果使用
时间
而不是
速度
和
加速度
来指定两个运动的速度曲线,则交融轨迹会遵循原始 MoveJ 的轨迹。当两个运动都受时
间约束时,使用交融不会节省时间。
• MoveL 中的交融 在 MoveL 中交融时,交融的位置以恒定速度遵循圆弧路径。方向与两
用 户 手 册 143 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。