99419_UR5e_User_Manual_zh_Global.pdf - 第209页
警 告 1. 当 自 动 加 载 、 自 动 启 动 和 自 动 初 始 化 被 启 用 时 , 只 要 输 入 信 号 与 选 定 的 信 号 电 平 相 匹 配 , 机 器 人 在 控 制 箱 上 电 后 立 即 运 行 程 序 。 例 如 : 在 这 种 情 况 下 , 不 需 要 边 沿 转 换 到 选 定 的 信 号 电 平 。 2. 信 号 电 平 设 置 为 低 电 平 时 请 小 心 。 输 入 信 号 默 认 为 低 …

1. 点按新建,以使用建议的新变量名称访问创建新的安装变量字段。
2. 点按创建新的安装变量字段以更改变量名称。
3. 如果在此安装中未使用新的变量名,请点按确定。
4. 在列表中选择变量,然后点按编辑值以更改安装变量的值。
5. 配置变量后,必须保存安装本身以保留配置。
删除变量
1. 选择变量,然后点按删除。
如果加载的程序与程序变量同名,或者如果加载的安装与安装变量同名,则会显示以下选项:
您可以使用同名的安装变量而不是程序变量来解决问题,也可以通过将冲突变量自动重命名
来解决问题。
25.7. 启动
启动屏幕包含自动加载设置、启动默认程序,以及在启动时,自动对机器手臂进行初始化。
UR5e 194 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
1. 当自动加载、自动启动和自动初始化被启用时,只要输入信号与选定的
信号电平相匹配,机器人在控制箱上电后立即运行程序。例如:在这种情
况下,不需要边沿转换到选定的信号电平。
2. 信号电平设置为低电平时请小心。输入信号默认为低电平,使程序自动
运行而不受外部信号的触发。
3. 在运行已启用自动启动和自动初始化的程序之前,您必须处于远程控制
模式。
25.7.1. 加载启动程序
控制箱接通电源后将加载默认程序。此外,当进入运行程序屏幕( 请参阅23.运行选项卡 在本
页125) 且未加载任何程序时,将自动加载默认程序。
25.7.2. 开启启动程序
默认程序会在运行程序屏幕中自动启动。当加载默认程序并检测到指定的外部输入信号沿过
渡时,该程序将自动启动。
在启动时,当前输入信号电平未定义。在启动时选择与信号电平相匹配的转换会立即启动程
序。此外,离开运行程序屏幕或点按仪表板中的“停止”按钮将禁用自动启动功能,直到再次按
下“运行”按钮为止。
25.8. 工具 I/O
用 户 手 册 195 UR5e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
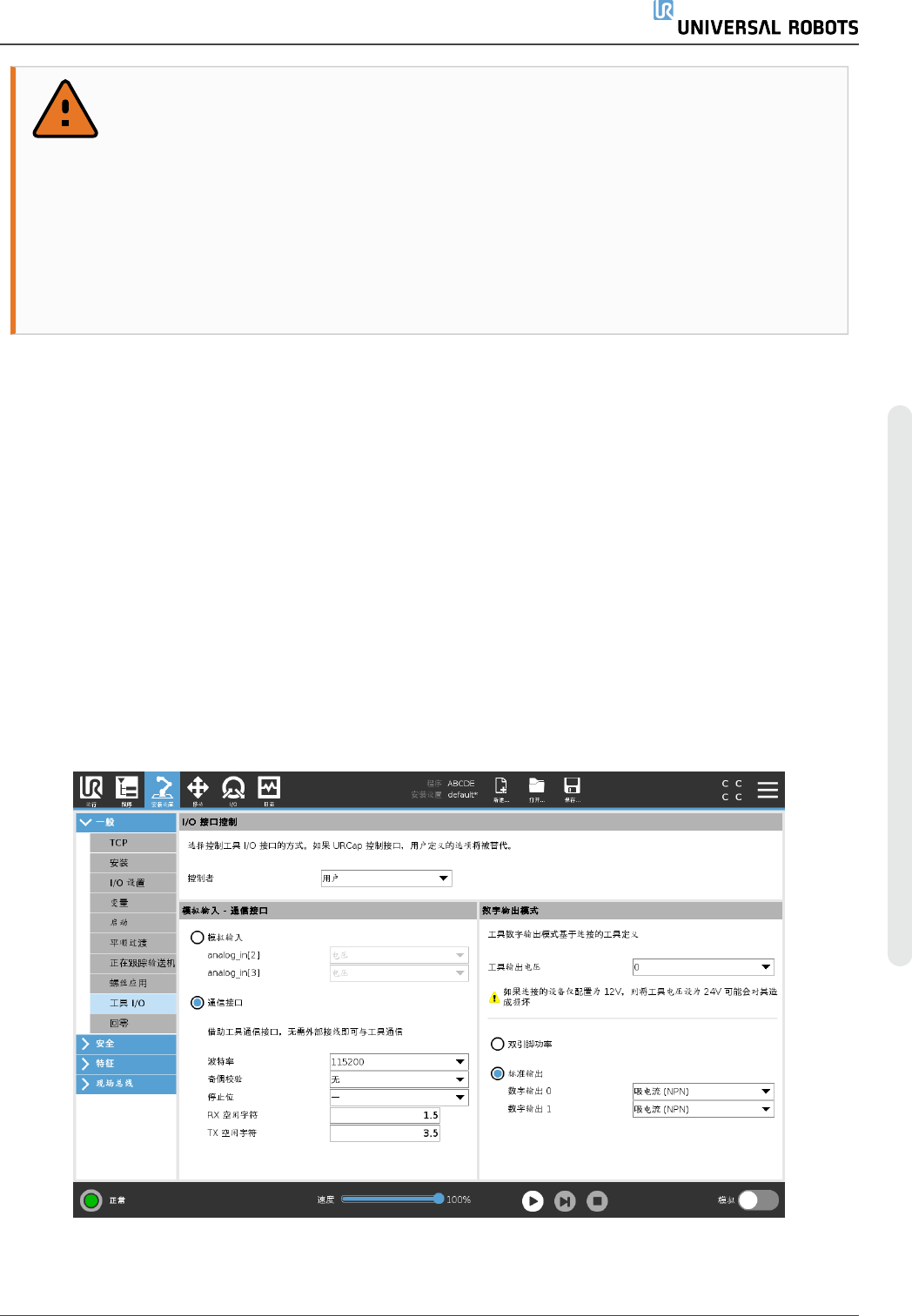
25.9. I/O 接口控制
I/O 接口控制允许您在用户控制和 URcap 控制之间切换。
1. 点按“安装设置”选项卡,然后在“一般”下,点按工具 I/O
2. 在 I/O 接口控制下,选择用户,以访问“工具模拟输入”和/或“数字输出模式”设置。选择
URCap将删除对工具模拟输入和数字输出模式设置的访问。
提示
如果一个URCap控制一个末端执行器,如夹持器,则URCap需要控制工具IO界
面。选择列表中的URCap,允许其控制工具IO界面。
25.10. 工具模拟输入
25.10.1. 工具通信接口
工具通信接口 (TCI) 使机器人可以通过机器人工具模拟输入与连接的工具进行通信。这消除
了对外部布线的需要。
一旦工具通信接口被启用,所有的工具模拟输入都不可用。
25.10.2. 设置工具通信接口( TCI)
1. 点按“安装设置”选项卡,然后在“一般”下,点按工具 I/O.
2. 选择通信接口以编辑 TCI 设置。
启用 TCI 后,工具模拟输入不可用于安装的 I/O 设置,并且不会出现在输入列表中。工具
模拟输入也不可用于等待选择和表达式。
3. 从“通信接口”的下拉菜单中,选择所需的值。
值的任何变化都会立即发送到该工具。如果任何安装值与工具使用的值不同,会出现一
个警告。
25.11. 数字输出模式
工具通信接口可以单独设置两个数字输出。在 PolyScope 中,每一针都有一个用于设置输出模
式的下拉菜单。可选择的选项包括:
• 下沉:允许在 NPN 或下沉配置中配置引脚。输出关闭时,针允许电流流向地面。这可与
PWR 引脚结合使用以形成完整电路。请参见 硬件安装手册中的第五章。
• 寻源:允许在 PNP 或寻源配置中配置引脚。输出开启时,针提供正电压来源( 可在 IO 选
项卡中设置) 。这可与 GND 引脚结合使用以形成完整电路。
• 推/拉:允许在推/拉配置中配置引脚。输出开启时,针提供正电压来源( 可在 IO 选项卡中
UR5e 196 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。