99419_UR5e_User_Manual_zh_Global.pdf - 第50页
3 档 位 使 动 装 置 下 图 说 明 了 3 档 位 使 动 装 置 的 连 接 方 法 。 有 关 3 档 位 使 动 装 置 的 更 多 信 息 , 请 参 阅 21. 操 作 模 式 选 择 在 本 页 103 一 节 。 提 示 通 用 机 器 人 安 全 系 统 不 支 持 多 台 3 档 位 使 动 装 置 。 24V CI1 24V CI2 24V CI3 24V CI0 24V CI5 24V CI6 24V C…
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
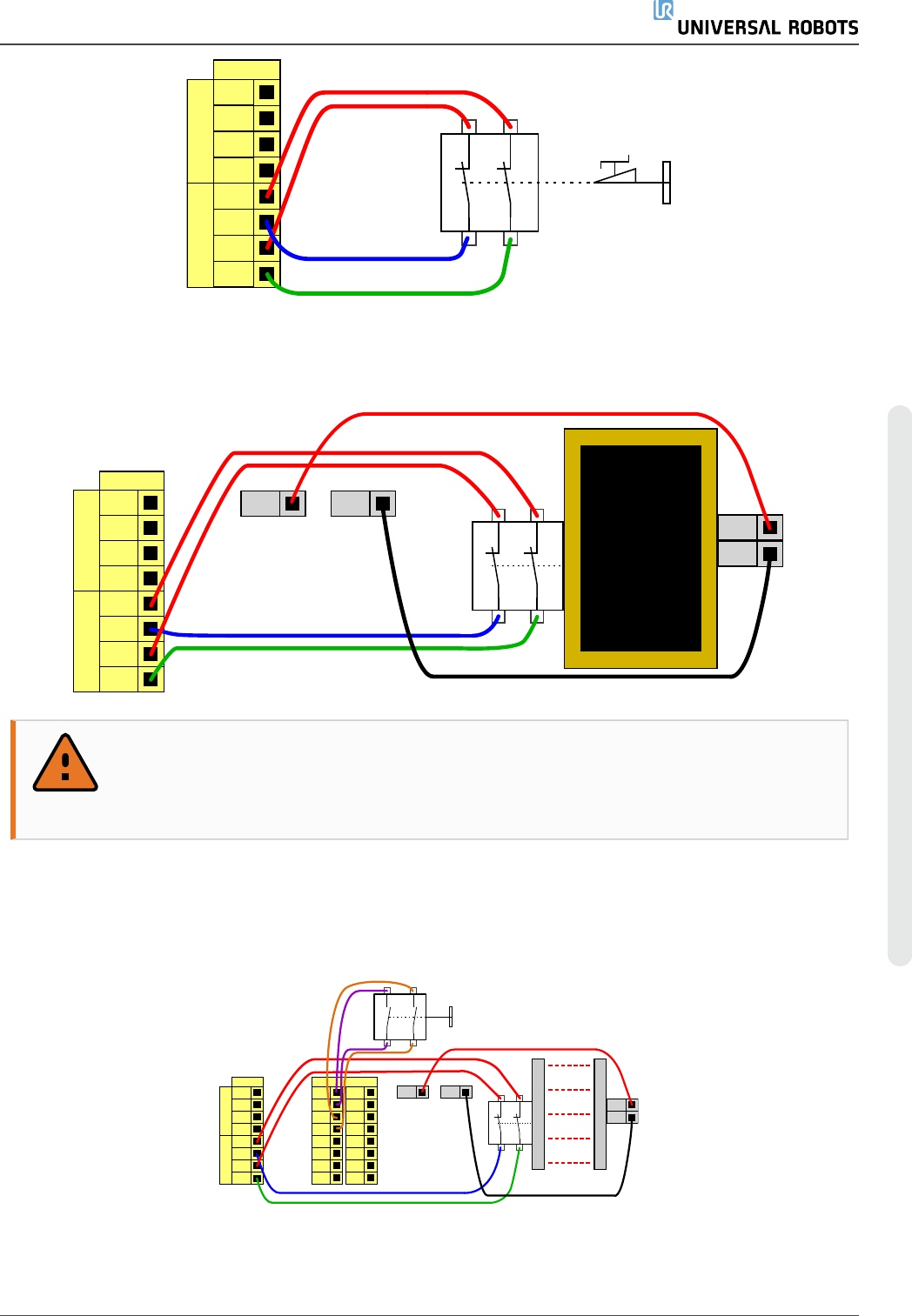
此配置仅针对操作员不能通过门并在身后关上门的应用。可配置的 I/O 用于设置门外的重置按
钮,以重新激活机器人运动。
适合进行自动恢复的另外一个例子是使用安全垫或安全型激光扫描仪( 参见下图) 。
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
24V 0V
24V
0V
警告
1. 当重建信号时,机器人自动恢复运动。如果可从安全地带内部重建信号,
请勿使用此配置。
带 重 置 按 钮 的 防 护 停 止
如果使用防护接口与光幕交互,需要从安全地带外部进行重置。重置按钮必须为双通道型按
钮。在本例中,重置配置的 I/O 为 CI0-CI1( 参见下图) 。
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
24V 0V
24V
0V
24V
CI1
24V
CI2
24V
CI3
24V
CI0
Configurable Inputs
24V
CI5
24V
CI6
24V
CI7
24V
CI4
用 户 手 册 35 UR5e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
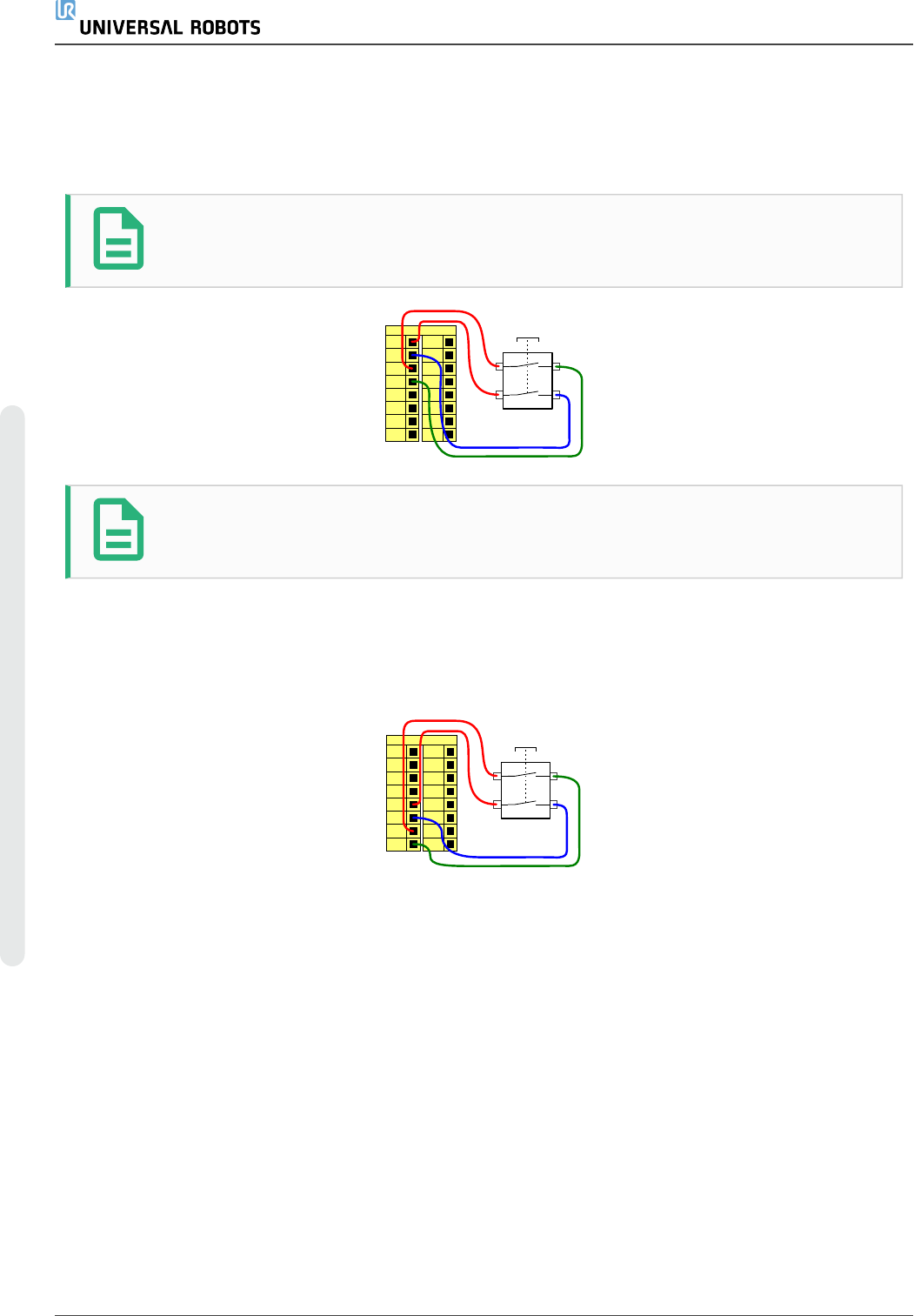
3 档 位 使 动 装 置
下图说明了 3 档位使动装置的连接方法。有关 3 档位使动装置的更多信息,请参阅21.操作模
式选择 在本页103一节。
提示
通用机器人安全系统不支持多台3档位使动装置。
24V
CI1
24V
CI2
24V
CI3
24V
CI0
24V
CI5
24V
CI6
24V
CI7
24V
CI4
Configurable Inputs
3-Position Switch
提示
3档位使动装置输入的两个输入通道具有1秒的不一致容差。
操 作 模 式 开 关
下图展示了一个操作模式开关。有关操作模式的更多信息,请参见21.1. 操作模式 在本页103
一节。
24V
CI1
24V
CI2
24V
CI3
24V
CI0
24V
CI5
24V
CI6
24V
CI7
24V
CI4
Configurable Inputs
Operational mode Switch
6.4.3. 通用数字 I/O
本节将介绍通用 24V I/O( 灰色端子) 和未配置为安全 I/O 时的可配置 I/O( 带黑色文字的黄色端
子) 。务必遵守6.4.1. 所有数字 I/O 的通用规范 在本页31一节的通用规范。
通用 I/O 可用于直接驱动气动继电器等设备,或用于与其他 PLC 系统通信。程序停止执行时,
所有数字输出可自动禁用,请参阅第 II 部分PolyScope 手册 在本页87。此模式下,如果程序没
有运行,则输出始终为低电平。下面的章节举了几个例子。这些示例使用的是常规数字输出,
但如果可配置的输出没有被配置为执行安全功能,也可使用此类输出。
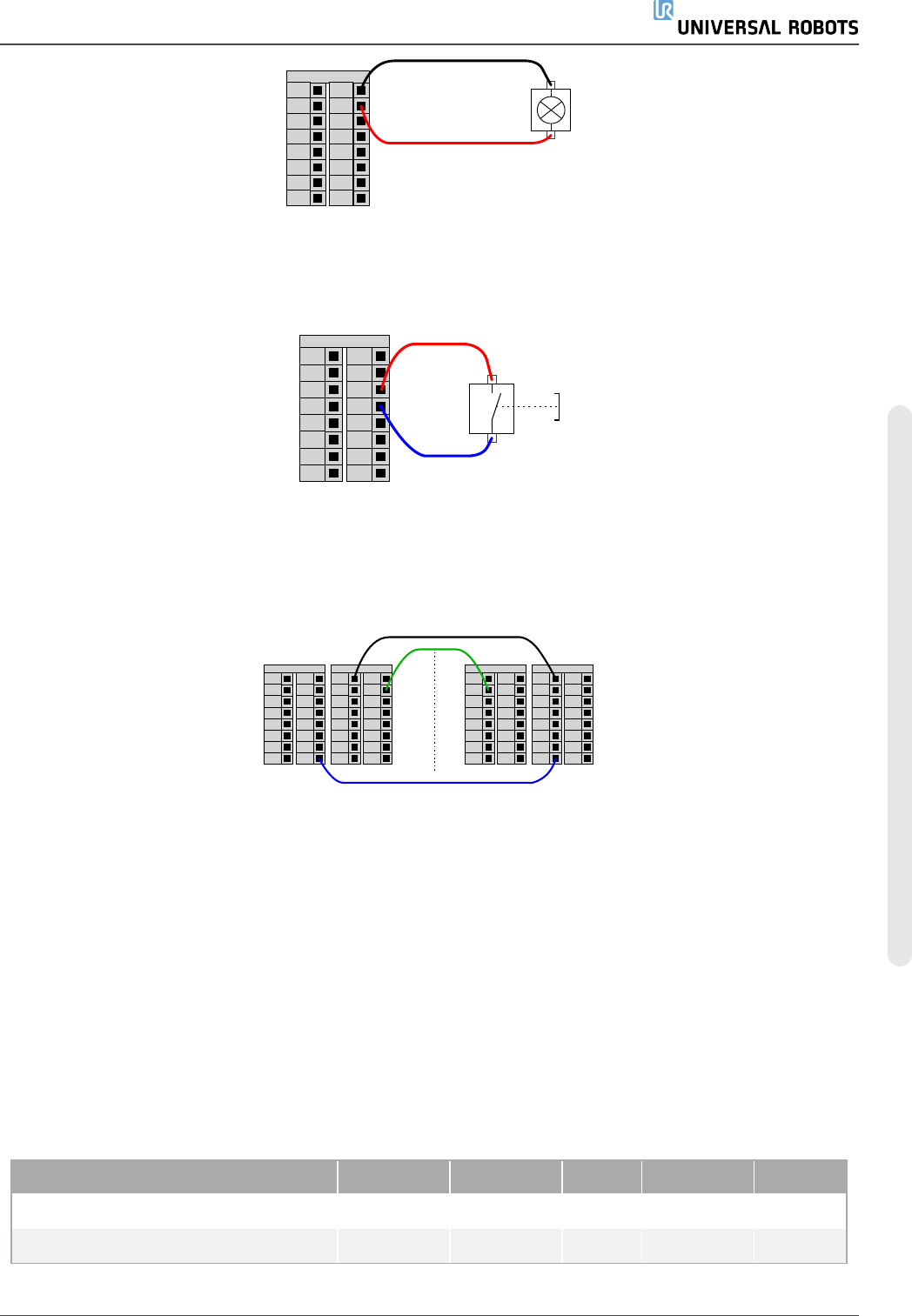
由 数 字 输 出 控 制 的 负 载
本例说明了当负载连接时,如何由数字输出进行控制。
UR5e 36 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
0V
DO1
0V
DO2
0V
DO3
0V
DO0
Digital Outputs
0V
DO5
0V
DO6
0V
DO7
0V
DO4
LOAD
6.4.4. 从按钮进行的数字输入
本例说明了简单按钮与数字输入的连接方式。
24V
DI1
24V
DI2
24V
DI3
24V
DI0
Digital Inputs
24V
DI5
24V
DI6
24V
DI7
24V
DI4
6.4.5. 与其他机器或 PLC 通信
如果建立了通用 GND (0V) 并且机器采用 PNP 技术,则可使用数字 I/O 与其他设备通信,参见
下图。
24V
DI1
24V
DI2
24V
DI3
24V
DI0
Digital Inputs
24V
DI5
24V
DI6
24V
DI7
24V
DI4
0V
DO1
0V
DO2
0V
DO3
0V
DO0
Digital Outputs
0V
DO5
0V
DO6
0V
DO7
0V
DO4
24V
DI1
24V
DI2
24V
DI3
24V
DI0
Digital Inputs
24V
DI5
24V
DI6
24V
DI7
24V
DI4
0V
DO1
0V
DO2
0V
DO3
0V
DO0
Digital Outputs
0V
DO5
0V
DO6
0V
DO7
0V
DO4
A B
6.4.6. 通用模拟 I/O
模拟 I/O 接口为绿色终端。此类接口可用于设置或测量进出其他设备的电压 (0-10V) 或电流 (4-
20mA)。
为获得最高准确度,建议遵循以下说明:
• 使用最靠近该 I/O 的 AG 端子。此对共用一个共模滤波器。
• 设备和控制箱使用相同的 GND (0V)。模拟 I/O 没有与控制箱进行电位隔离。
• 使用屏蔽电缆或双绞线。将屏蔽线与电源端子处的 GND 端子相连。
• 使用在电流模式下工作的设备。电流信号的敏感度低于接口。
可以在 GUI 中选择输入模式( 请参阅第 II 部分PolyScope 手册 在本页87) 。电气规范如下所示。
终端 参数 最小值 类型 最大值 单位
电流模式下的模拟输入
[AIx - AG]
电流 4 - 20 mA
用 户 手 册 37 UR5e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。