99419_UR5e_User_Manual_zh_Global.pdf - 第135页
警 告 • 如 果 禁 用 默 认 的 防 护 重 置 输 入 , 当 输 入 为 高 时 , 机 器 人 手 臂 将 不 再 进 行 防 护 停 止 。 已 暂 停 的 程 序 只 能 通 过 防 护 停 止 进 行 恢 复 。 • 与 防 护 重 置 类 似 , 如 果 默 认 自 动 模 式 防 护 重 置 不 可 用 , 当 自 动 模 式 防 护 停 止 输 入 为 高 时 , 机 器 人 手 臂 将 不 再 进 行 防 护 …
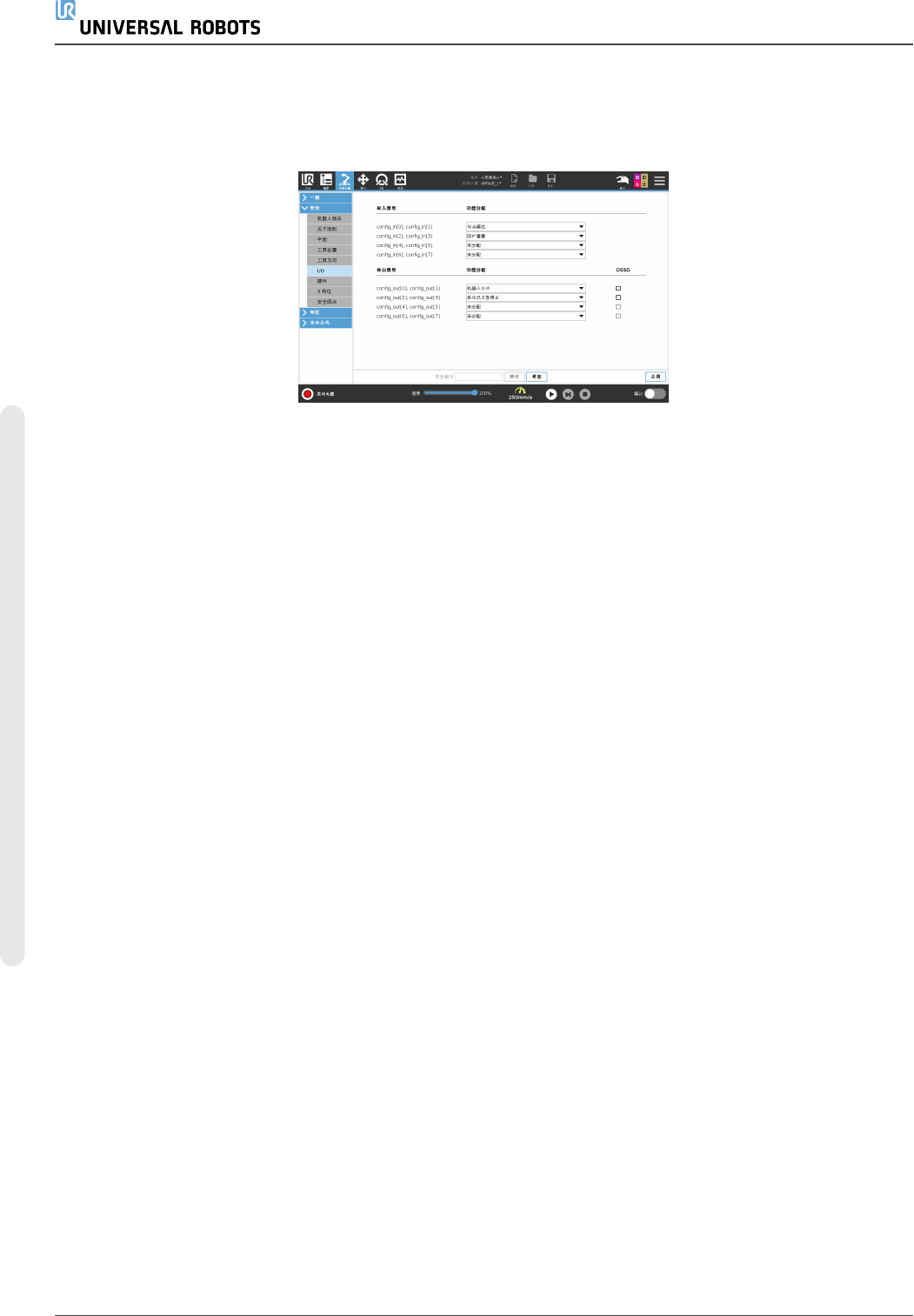
22.16. I/O
输入端与输出端之间的 I/O 是分开的,并成对出现,以便每个功能都提供一个 3 类 PLd I/O。
22.16.1. 输入信号
下列安全功能可与输入信号一起使用:
系统紧急停止
这是一个紧急停止按钮,可替代示教盒上的紧急停止按钮,如果装置符合 ISO 13850,则可
提供相同的功能。
缩减模式
所有安全限值都可以在正常模式或缩减模式下应用( 请参阅22.8. 安全模式 在本页111) 。配
置后,发送到输入端的低信号将导致安全系统过渡到缩减模式。机器人手臂将减速,以符
合缩减模式限值设置。安全系统保证在输入触发后不到 0.5 秒内,机器人将处于缩减模式
限值以内。
如果机器人手臂继续触犯任何缩减模式限值,将实施 0 类停机。向正常模式转换的方式与
此相同。触发平面同样可能导致向缩减模式切换。
3 档位使动装置
在手动模式下,必须按下外部 3 档位使动装置并将其保持在中央位置才能移动机器人。
如果您使用内置的 3 档位使动装置,必须按下按钮并将其保持在中央位置才能移动机器
人。
操作模式
定义后,此输入可用于在自动模式和手动模式之间切换( 请参阅21.1. 操作模式 在本页
103) 。
防护重置
发生防护停止时,此输出可确保在触发重置前保持防护停止状态。
自动模式防护停止
配置后,自动模式防护停止将在输入引脚为低电平且仅当机器人处于自动模式时执行防
护停止。
自动模式防护重置
发生自动模式防护停止时,机器人将保持自动模式下的防护停止,直到输入引脚上升沿触
发重置。
UR5e 120 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
• 如果禁用默认的防护重置输入,当输入为高时,机器人手臂将不再进行
防护停止。已暂停的程序只能通过防护停止进行恢复。
• 与防护重置类似,如果默认自动模式防护重置不可用,当自动模式防护
停止输入为高时,机器人手臂将不再进行防护停止。已暂停的程序只能
通过自动模式防护停止进行恢复。
22.16.2. 输出信号
您可以对输出信号应用下列安全功能。触发高信号的状态结束时,所有信号恢复成低信号:
系统紧急停止
当安全系统通过机器人紧急停止输入或紧急停止按钮触发进入紧急停止状态时,信号为
低电平
。为了避免死锁,如果紧急停止状态由紧急停止输入触发,则不会给出低信号。
机器人运动
如果机器人在移动,则信号为
低电平
,否则为高电平。
机器人未停止
当由于紧急停止或防护停止而使机器人停止或处于停止过程中时,信号为
高电平
。否则将
为逻辑低电平。
缩减模式
当机器人手臂处于缩减模式,或利用缩减模式输入配置安全输入且信号当前为低电平时,
信号为
低电平
。否则信号为高信号。
非缩减模式
这与上面定义的缩减模式相反。
安全原点
当机器人手臂停在配置的安全原点时,信号为
高电平
。否则,信号为
低电平
。
提示
通过系统紧急停止输出从机器人获得紧急停止状态的任何外部机械必须符合
ISO 13850。这在机器人紧急停止输入连接到外部紧急停止装置的设置中尤其
必要。在这种情况下,当外部紧急停止装置释放时,系统紧急停止输出信号将
变高。这意味着外部机械的紧急停止状态将被重置,而不需要来自机器人操作
员的手动操作。因此,为了符合安全标准,外部机械必须采取手动操作才能恢
复。
22.16.3. OSSD 安全信号
当安全输出是未激活状态或者很高时,可以配置控制箱以输出OSSD脉冲。OSSD 脉冲检测控
制箱使安全输出有效/低的能力。当为输出启用 OSSD 脉冲时,每 32ms 在安全输出上生成 1ms
的低脉冲。安全系统会检测何时将输出连接到电源并关闭机器人。
用 户 手 册 121 UR5e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
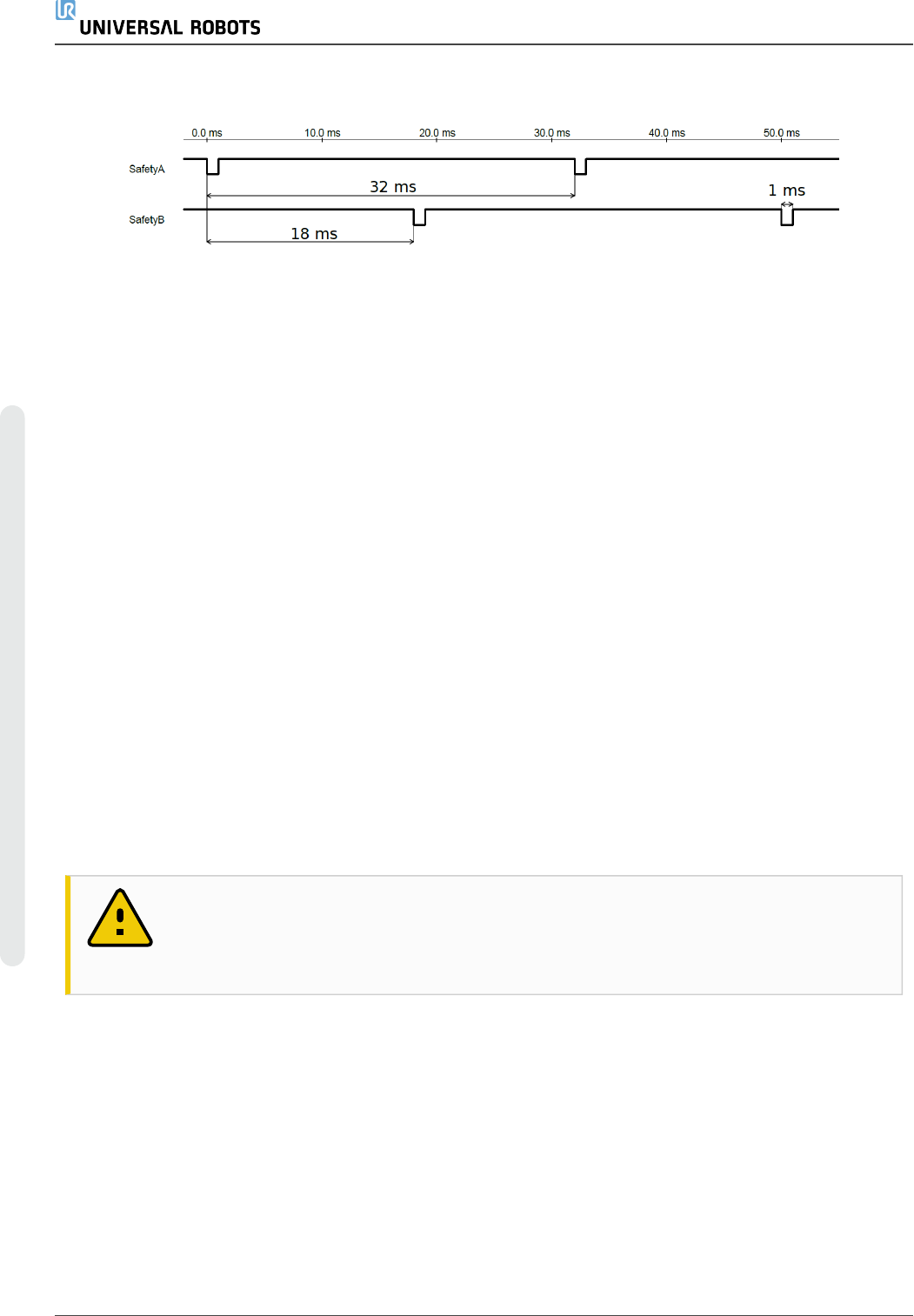
下图显示的内容为:一个通道( 32ms) 上的脉冲之间的时间,脉冲长度( 1ms) 和从一个通道上的
脉冲到另一通道上的脉冲的时间( 18ms)
启用OSSD进行安全输出
1. 点按页眉中的安装,然后选择安全。
2. 在安全下,选择 I/O。
3. 在“I/O”屏幕上的“输出信号”下,选择所需的OSSD复选框。须分配输出信号以启用OSSD
复选框。
22.17. 硬件
您可以在不连接示教盒的情况下使用机器人。移除示教盒需要定义另一个紧急停止源。必须
指定是否连接示教盒以避免触发安全违例。
22.17.1. 选择可用的硬件
机器人可在没有 PolyScope 作为编程界面的情况下使用。
1. 在页眉中,点按安装设置。
2. 在左侧的边栏菜单中,点按安全,然后选择硬件。
3. 输入安全密码并解锁屏幕。
4. 取消选中示教盒,在没有 PolyScope 界面的情况下使用机器人。
5. 按保存并重启以应用更改。
小心
如果示教盒与机器人分离或断开,则紧急停机按钮不再有效。您必须从机器人
附近移除示教盒。
22.18. 安全回零位置
安全回零是使用用户定义的原点定义的返回位置。当机器人手臂处于安全回零位置且定义了
安全回零 I/O 时,安全回零 I/O 启用。如果关节位置处于指定的关节角度或其 360 度的倍数,则
机器人手臂处于安全回零位置。当机器人静止在安全回零位置时,安全回零安全输出有效。
UR5e 122 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。