99419_UR5e_User_Manual_zh_Global.pdf - 第141页
23. 4.2. 移 动 机 器 人 至 : 按 住 移 动 机 器 人 至 : 将 机 器 人 手 臂 移 动 到 起 始 位 置 。 屏 幕 上 显 示 的 动 画 机 器 人 手 臂 显 示 了 将 要 执 行 的 所 需 动 作 。 提 示 碰 撞 会 损 坏 机 器 人 或 其 他 设 备 。 比 较 动 画 和 真 实 机 器 人 手 臂 的 位 置 , 确 保 机 器 人 手 臂 可 以 安 全 地 运 动 , 不 会 打…
变量类型
布
尔
值
布尔变量,值为 True or False。
整
数
值
整数,范围为 − 2147483648 到 2147483647( 32 位) 。
浮
点
值
浮点数( 十进制) ( 32 位) 。
字
符
串
字符序列。
位
姿
矢量,指示笛卡尔空间中的位置和方向。这是表示方向的位置矢量 (
x
,
y
,
z
) 和旋转矢量
(
rx
,
ry
,
rz
) 的组合,书写形式为 p[x, y, z, rx, ry, rz]。
列
表
变量序列。
23.3. 机器人年龄
此字段表示自机器人最初打开以来的时间长度。此字段中的数字与程序运行时不相关
23.4. 将机器人移动就位
当机器人手臂必须在运行程序之前移动到特定的起始位置时,或者在修改程序时机器人手臂
正向某个路点移动时,访问将机器人移动就位屏幕。
如果将机器人移动就位屏幕无法将机器人手臂移动到程序起始位置,则会移动到程序树中的
第一个路点。
如果出现以下情况,机器人手臂可能会移动到不正确的位姿:
• 在执行第一次移动之前,第一次移动的 TCP、特征位姿或路点位姿会在程序执行期间改
变。
• 第一个路点位于 If 或 Switch 程序树节点内。
23.4.1. 访问将机器人移动就位屏幕
1. 在页脚中,点按播放以访问将机器人移动就位屏幕。
2. 按照屏幕上的说明与动画和真实机器人进行交互。
UR5e 126 用 户 手 册
23.运 行选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
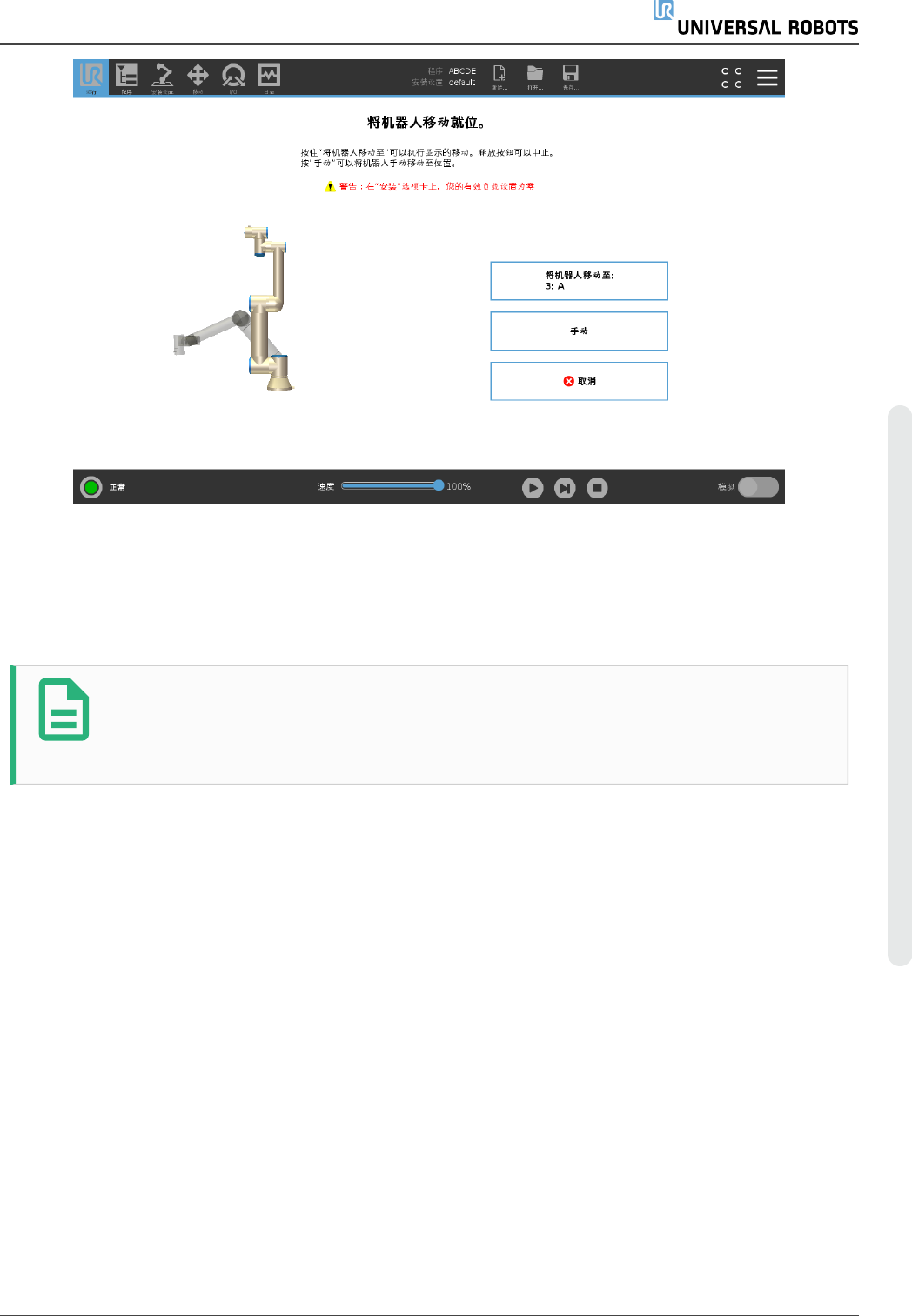
23.4.2. 移动机器人至:
按住移动机器人至:将机器人手臂移动到起始位置。屏幕上显示的动画机器人手臂显示了将
要执行的所需动作。
提示
碰撞会损坏机器人或其他设备。比较动画和真实机器人手臂的位置,确保机器
人手臂可以安全地运动,不会打到障碍物。
23.4.3. 手动
点按手动可访问移动屏幕,在此屏幕中,可以使用移动工具箭头和/或配置“工具位置”以及“关
节位置”坐标来移动机器人手臂。
用 户 手 册 127 UR5e
23.运 行选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5e 128 用 户 手 册
23.运 行选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。