99419_UR5e_User_Manual_zh_Global.pdf - 第33页
3.4. 安 全 功 能 安 全 系 统 通 过 监 视 是 否 违 反 任 何 安 全 限 制 或 者 是 否 启 动 了 紧 急 停 止 或 防 护 停 止 来 起 作 用 。 安 全 系 统 的 反 应 有 : 触 发 反 应 紧 急 停 机 1 类 停 机 。 防 护 停 止 停 机 类 别 2. 违 反 限 制 停 机 类 别 0. 故 障 反 应 停 机 类 别 0. 提 示 如 安 全 系 统 检 测 到 任 何 故 障 …
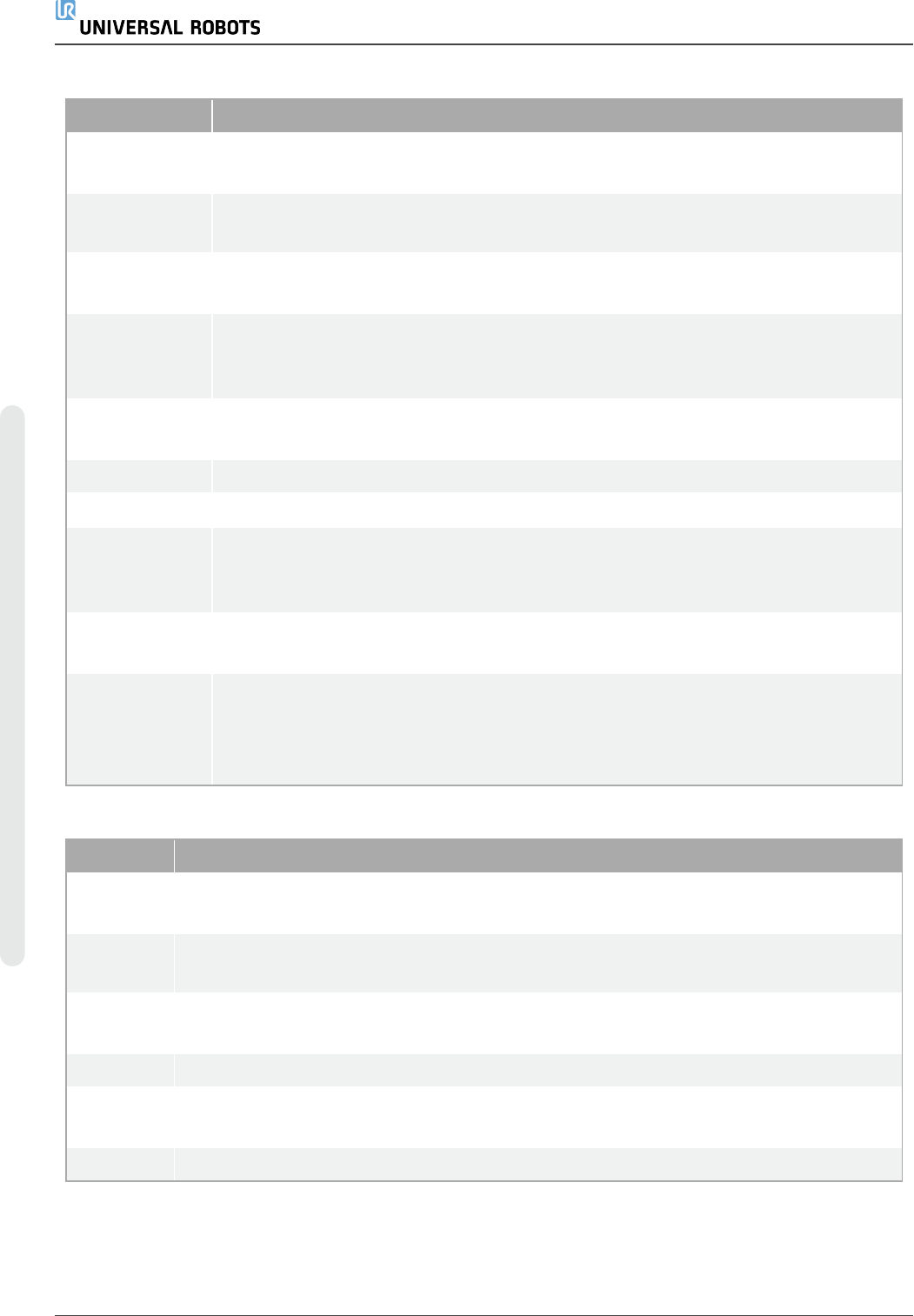
机器人还具有以下安全输入:
安全输入 描述
紧急停止按钮
执行 1 类停机 (IEC 60204-1) ,利用
系统紧急停止
输出通知其他机器( 如果已
定义该输出) 。连接到输出的任何物体都会启动停止。
机器人紧急停
止
通过控制箱输入执行 1 类停机 (IEC 60204-1),利用
系统紧急停止
输出通知其
他机器( 如果已定义该输出) 。
系统紧急停止
在所有模式下仅对机器人执行 1 类停机 (IEC 60204-1),并且优先于所有其他
命令。
防护停止
在所有模式下执行 2 类停机 (IEC 60204-1),但使用 3 档位使动装置和模式选
择器时除外。在手动模式下时,可以将“防护停止”设置为仅在自动模式下有
效。
自动模式防护
停止
仅在自动模式下执行 2 类停机 (IEC 60204-1)。只有 3 档位使动装置已配置并
安装,才可以选择
自动模式防护停止
。
防护重置 当防护重置输入出现上升沿时,从
防护停止
状态返回。
缩减模式 将安全系统过渡为使用
缩减模式
限值。
3 档位使动装
置
仅当使动装置在手动模式下完全按下或完全释放时才启动 2 类停机 (IEC
60204-1)。当输入为低时,触发3 档位使动装置停止。它不受防护重置的影
响。
操作模式
操作模式间的切换。当输入信号为低电平时,机器人将处于自动模式,当输
入信号为高电平时,机器人处于手动模式。
Automatic
Mode
Safeguard
Reset
当自动模式防护重置输入出现上升沿时,从
自动模式防护停止
状态返回。
为了与其他机器连接,机器人配有以下安全输出:
安全输出 描述
系统紧急
停止
当此信号为逻辑低电平时,
机器人紧急停止
输入为逻辑低电平或按下紧急停止
按钮。
机器人运
动
当此信号为逻辑高电平时,机器人单个关节的移动速度均不会超过 0.1rad/ s。
机器人未
停止
当由于紧急停止或防护停止而使机器人停止或处于停止过程中时为逻辑高电
平。否则将为逻辑低电平。
缩减模式 当安全系统处于缩减模式时为逻辑低电平。
非缩减模
式
当系统未处于缩减模式时为逻辑低电平。
Safe Home 当机器人处于设置的安全回零位置时逻辑高。
所有安全 I/O 均为双通道,这意味着它们在低电平时是安全的( 例如,当信号为低电平时,紧急
停止处于激活状态) 。
UR5e 18 用 户 手 册
3.安 全相 关的 功能 和接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
3.4. 安全功能
安全系统通过监视是否违反任何安全限制或者是否启动了紧急停止或防护停止来起作用。
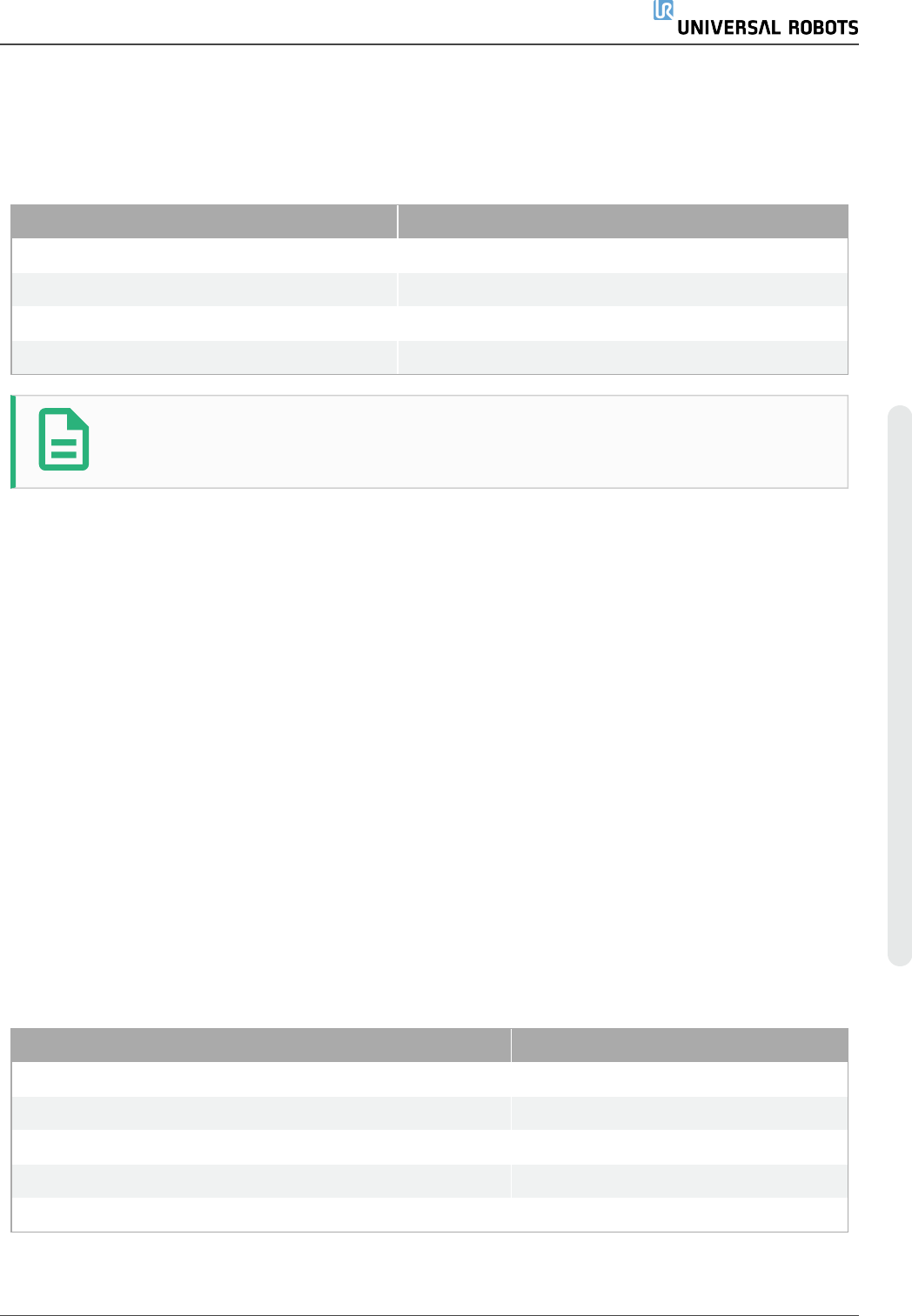
安全系统的反应有:
触发 反应
紧急停机 1 类停机。
防护停止 停机类别 2.
违反限制 停机类别 0.
故障反应 停机类别 0.
提示
如安全系统检测到任何故障或违例,所有安全输出重置为低。
3.5. 模式
正 常 和 缩 减 模 式
安全系统有两种可配置的模式:正常和缩减。每种模式均可配置安全极限。当机器人工具/末端
执行器位于触发缩减模式平面的缩减模式侧或被安全输入触发时,缩减模式处于激活状态。
使用平面触发缩减模式:当机器人从触发平面的缩减模式侧移回到正常模式侧时,触发平面
周围有一个 20mm 的区域,允许正常模式和缩减模式限值。它可以防止当机器人位于极限位
置时安全模式闪烁。
使用输入触发缩减模式:使用输入( 以启动或停止缩减模式) 时,在应用新的模式限值之前可
能会经过长达 500ms 的时间。将缩减模式更改为正常模式或将正常模式更改为缩减模式都可
能会发生这种情况。它允许机器人适应,例如:速度达到新的安全限制。
恢 复 模 式
如果超过安全极限,则必须重启安全系统。如果系统在启动时超出安全限值( 如超出关节位置
限值) ,将进入特殊恢复模式。在恢复模式下,无法运行机器人程序,但利用自由驱动模式或
PolyScope 中的“移动”选项卡,可将机器人手臂手动移回限值范围内( 请参阅第 II 部分
PolyScope 手册 在本页87PolyScope 手册) 。恢复模式的安全极限为:
安全功能 限值
关节速度限值 30°/s
速度限值 250mm/s
力限值 100N
动量限值 10kg m/s
功率限值 80W
如果违反这些限制,安全系统发出 0 类停机。
用 户 手 册 19 UR5e
3.安 全相 关的 功能 和接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
在恢复模式下,关节位置、安全平面以及工具/末端执行器方向限制被禁用。将
机器人手臂移回极限范围内时应小心。
UR5e 20 用 户 手 册
3.安 全相 关的 功能 和接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。