99419_UR5e_User_Manual_zh_Global.pdf - 第196页
配 置 和 导 入 工 具 路 径 文 件 这 与 配 置 工 具 路 径 ( 请 参 阅 使 用 C AD /CA M 软 件 配 置 工 具 路 径 在 本 页 178 ) 和 导 入 工 具 路 径 ( 请 参 阅 将 G 代 码 工 具 路 径 导 入 Poly Sco pe 在 本 页 178 ) 相 似 。 配 置 常 规 T C P • 请 按 照 25.2. TC P 配 置 在 本 页 185 中 的 说 明 配 置…
配 置 远 程 TCP 工 具 路 径 节 点
1. 访问“程序”选项卡并点按 URCap。
2. 选择远程 TCP 移动以插入 RTCP_MoveP 节点。
3. 选择一个 TCP 并设置运动参数:工具速度,工具加速和交融半径。
4. 点按 +Toolpath 插入一个 RTCP 工具路径节点。如果不需要,请删除默认情况下创建的
RTCPWaypoint节点。
5. 从下拉菜单中选择一个工具路径文件和相应的远程 TCP PCS。
6. 如果要将不同的值应用于RTCPToolpath节点,请调整运动参数。
7. 点按移动到第一个点以验证抓取的零件是否按预期方式接近远程 TCP。
8. 以低速在仿真模式下测试程序以确认配置。
提示
在执行工具路径之前,通过添加 MoveJ 并将使用关节角度设置为移动到固定点
配置,可以确保每次执行工具路径时机器人的运动都是相同的。请参阅24.10.1.
移动 在本页136
24.13.7. 常规 TCP 工具路径移动
与配置远程 TCP 工具路径移动相似,常规 TCP 工具路径移动需要以下条件:
• 工具路径文件
• 常规 TCP
• 作为PCS的平面特征
用 户 手 册 181 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
配 置 和 导 入 工 具 路 径 文 件
这与配置工具路径( 请参阅使用 CAD/CAM 软件配置工具路径 在本页178) 和导入工具路径( 请
参阅 将G代码工具路径导入PolyScope在本页178) 相似。
配 置 常 规 TCP
• 请按照25.2. TCP 配置 在本页185中的说明配置常规 TCP 。
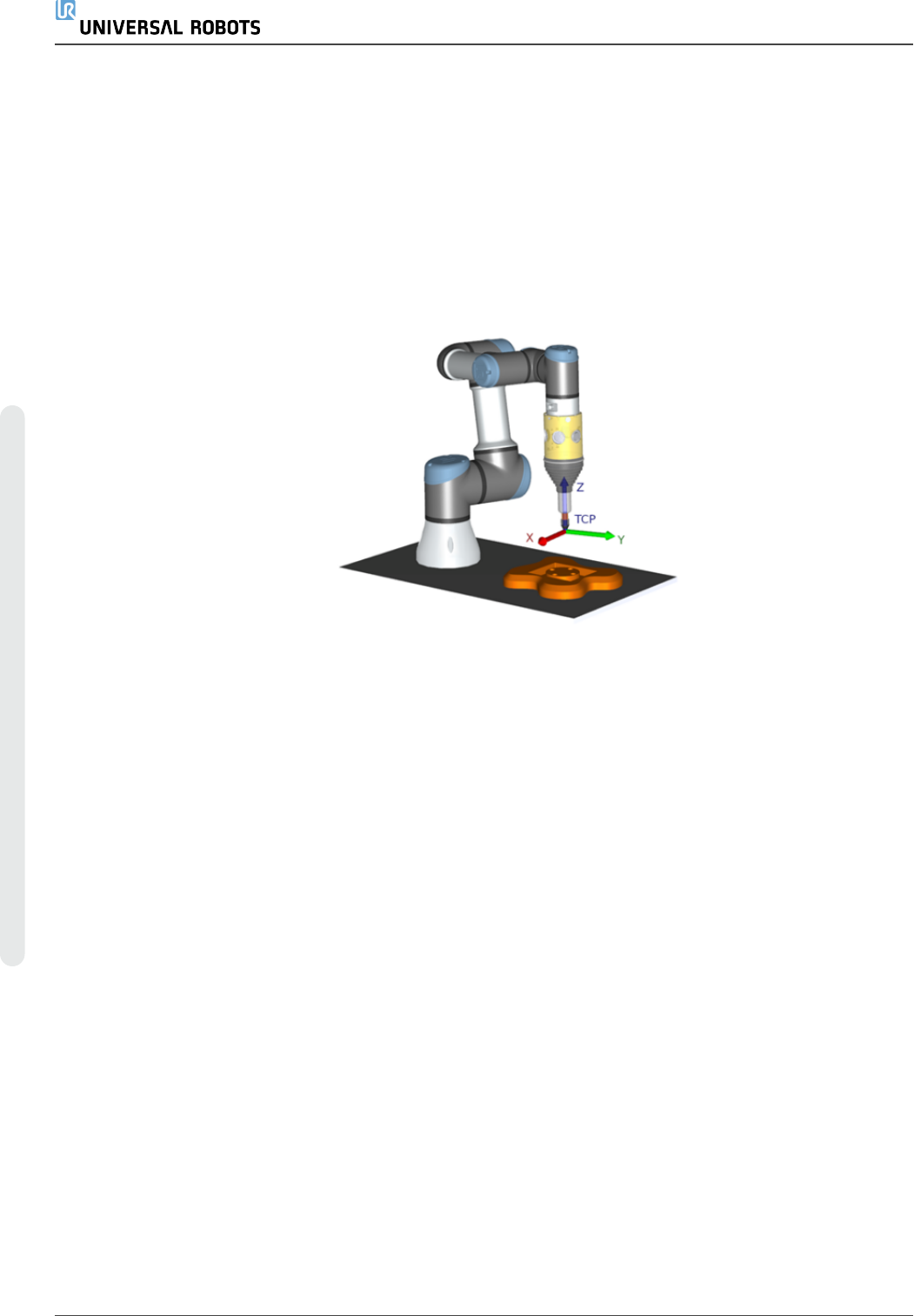
• 确认工具的Z轴正点远离零件表面。
配 置 平 面 特 征 PCS
1. 通过添加平面或示教平面来创建平面特征。请参阅25.17.5. 平面特征 在本页205.
2. 将零件固定在相对于机器人底座的位置。
3. 验证TCP是否正确,可用于创建平面功能。为了获得高精度,请临时设置一个清晰的远
程TCP以完成此教学过程。
4. 慢慢移动机器人使Remote TCP接触零件上PCS的原点、正 X-轴和正 Y-轴方向。
5. 完成教学过程,并确认PCS的位置和方向。
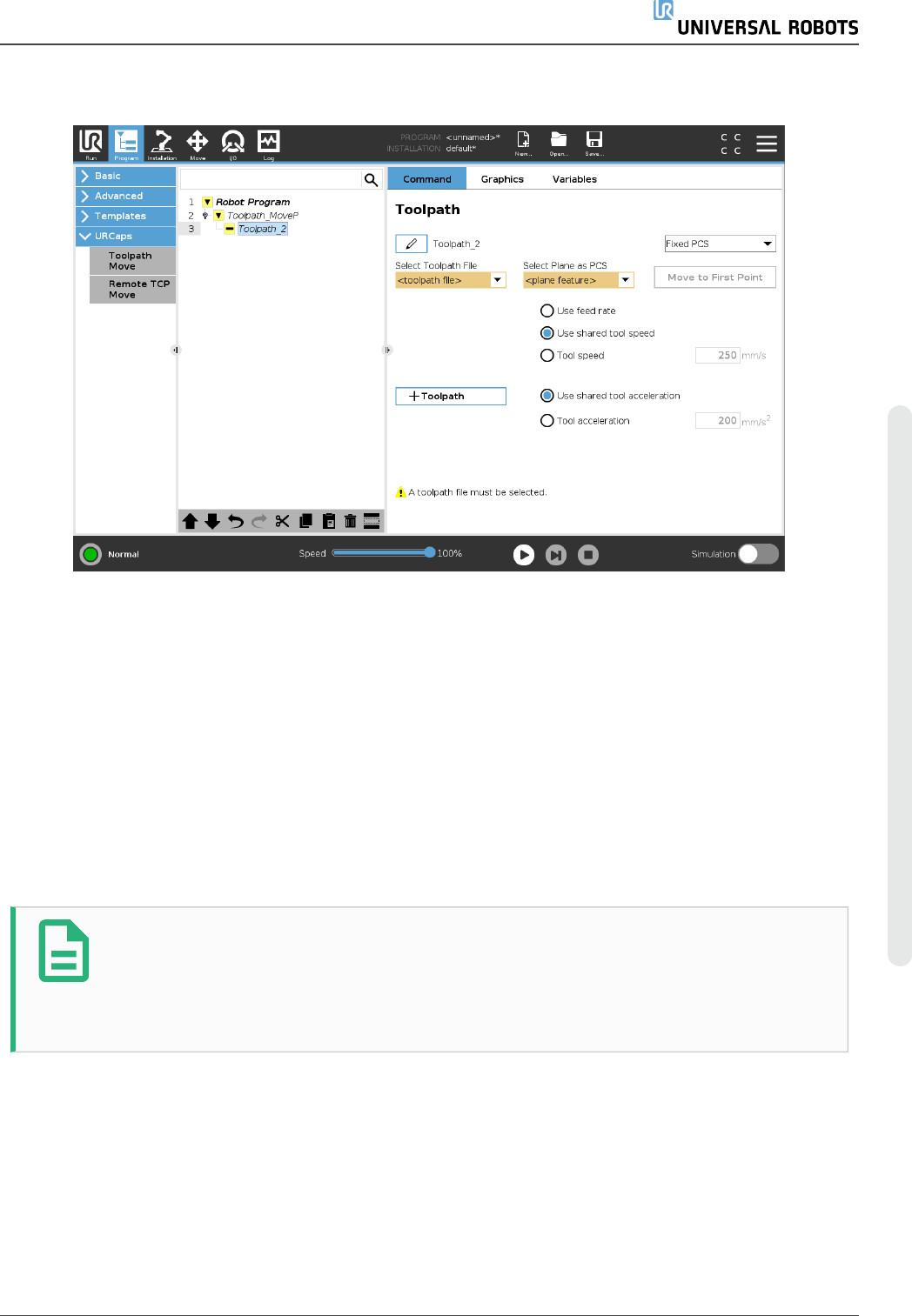
设 置 工 具 路 径 节 点
1. 访问“程序”选项卡并点按 URCap。
2. 选择一个 TCP 并设置运动参数:工具速度,工具加速和交融半径。选择使工具绕着 Z 轴
自由旋转。如果工具必须遵循工具路径文件中定义的绕Z轴的方向,则不要选择旋转工
具。
3. 点按 +Toolpath 插入一个工具路径节点。
4. 在下拉菜单中,选择一个工具路径文件和相应的PCS( 平面特征) 。
UR5e 182 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。