99419_UR5e_User_Manual_zh_Global.pdf - 第243页
4. 在 程 序 和 安 装 设 置 管 理 器 中 , 点 按 保 存 … , 然 后 选 择 “ 将 安 装 另 存 为 …” 。 5. 在 保 存 机 器 人 安 装 设 置 屏 幕 , 指 定 一 个 文 件 名 然 后 点 击 保 存 。 6. 选 择 设 定 安 装 设 置 为 当 前 程 序 来 设 定 安 装 设 置 。 7. 在 文 件 路 径 中 , 确 认 新 安 装 设 置 名 已 显 示 。 29 . 3 . …

1. 在程序和安装设置管理器中,点按打开…,然后选择“安装设置”。
2. 在加载机器人安装设置屏幕,选择现有安装设置然后点击打开。
3. 在安全配置对话框,选择应用并重启以提示机器人重启。
4. 选择设定安装设置为当前程序来设定安装设置。
5. 在文件路径中,确认目标安装名已显示。
29.2. 新建...
创建一个新程序和/或安装设置。
创建新程序
1. 在程序和安装设置管理器中,点按新建…,然后选择“程序”。
2. 在程序屏幕,根据需要配置新程序。
3. 在程序和安装设置管理器中,点按保存…,然后选择“全部保存”或“将程序另存为…”。
4. 在“将程序另存为...”屏幕,指定一个文件名然后点击保存。
5. 在文件路径中,确认新程序名已显示。
创建新安装设置
关闭机器人电源后,保存安装设置,以便日后使用。
1. 在程序和安装设置管理器中,点按新建…,然后选择“安装设置”。
2. 点击确认安全配置。
3. 在安装设置屏幕,根据需要配置您的新安装设置。
UR5e 228 用 户 手 册
29.程 序和 安装 管理 器
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
4. 在程序和安装设置管理器中,点按保存…,然后选择“将安装另存为…”。
5. 在保存机器人安装设置屏幕,指定一个文件名然后点击保存。
6. 选择设定安装设置为当前程序来设定安装设置。
7. 在文件路径中,确认新安装设置名已显示。
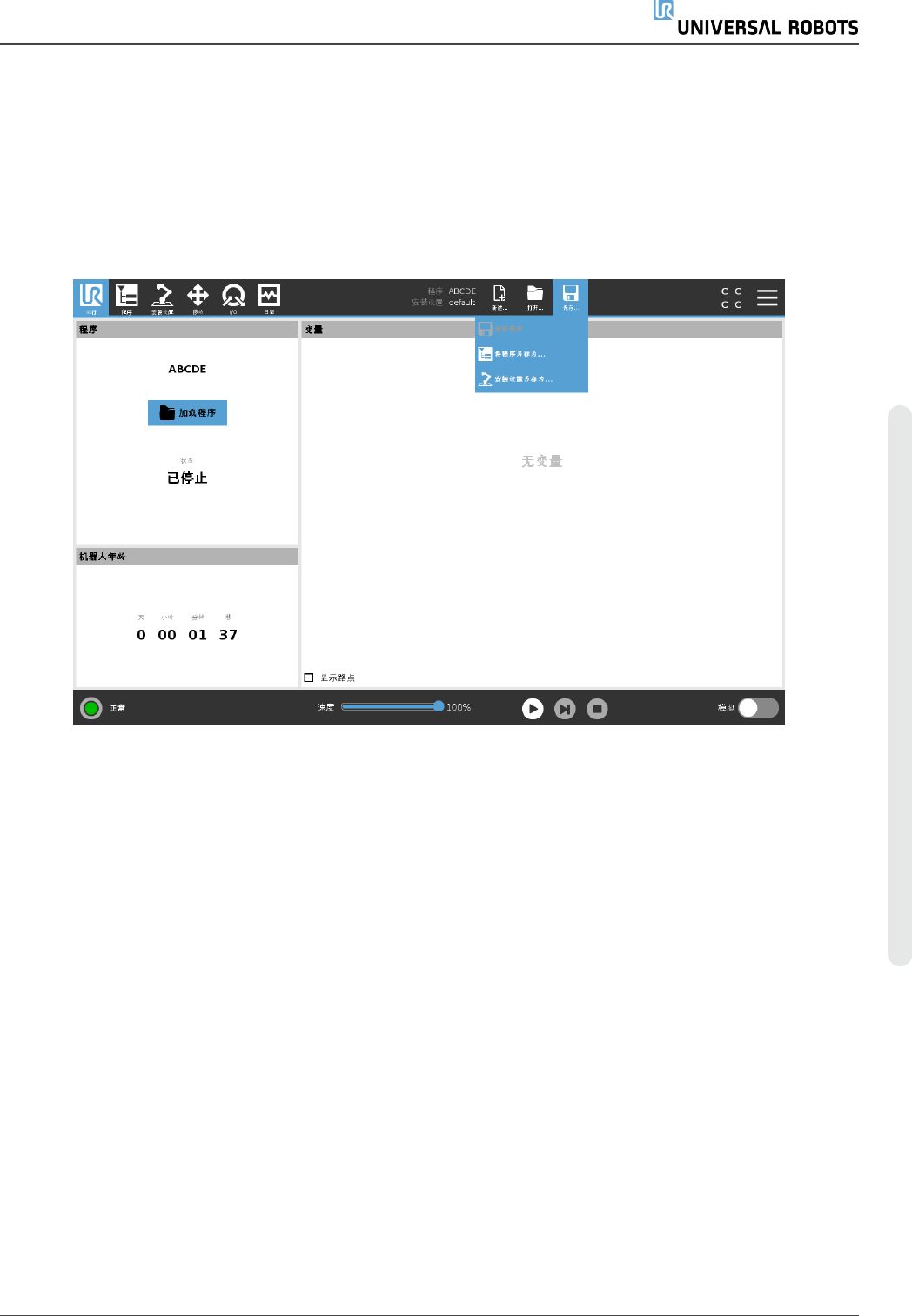
29.3. 保存...
保存… 提供了三个选项。根据加载-创建的程序/安装设置,可以:
全部保存可立即保存当前的程序和安装设置,系统不会提示保存到其他位置或保存为其他名
称。如果没有对程序或安装设置做出任何更改,“全部保存...”按钮灰显。
将程序另存为… 可更改新程序的名称和位置。当前安装设置也会以现有名称和位置保存。
将安装设置另存为… 可更改新安装设置的名称和位置。当前程序会以现有名称和位置保存。
用 户 手 册 229 UR5e
29.程 序和 安装 管理 器
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
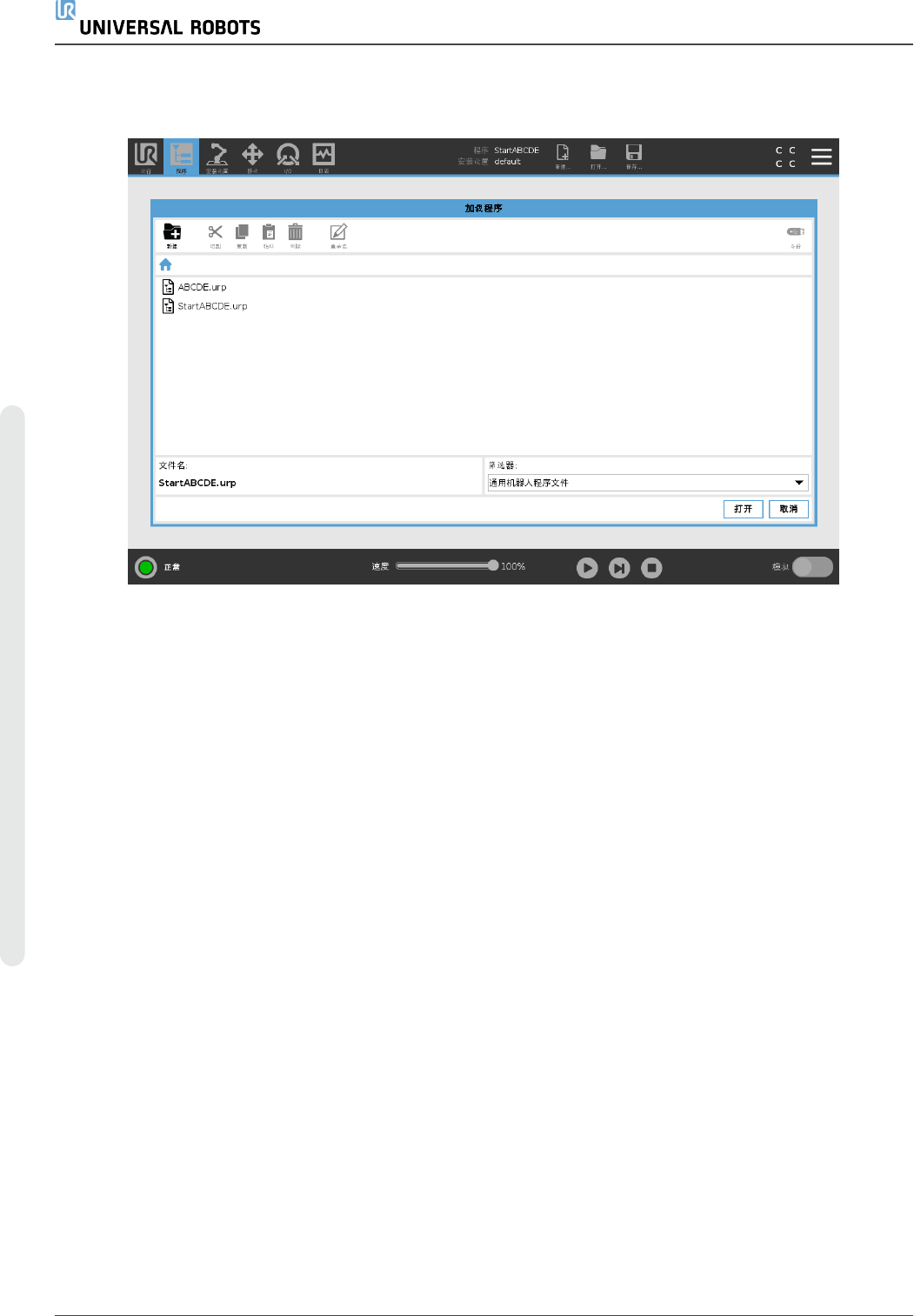
29.4. 文件管理器
此图片显示了加载屏幕,其中包含以下按钮:
面 包 屑 路 径
面包屑路径显示访问至当前位置的目录列表。选定面包屑中的目录名称,位置即变更至该目
录下,并在文件选择区域显示它。
文 件 选 择 区 域
点击文件名以打开它。按住目录名称半秒钟可选择目录。
文 件 筛 选 器
您可以指定显示的文件类型。选择备份文件后,此区域将显示最近保存的 10 个程序版本,其
中 ’.old0’ 是最新版本,’.old9’ 是最旧版本。
文 件 名
选定的文件显示在此处。保存文件时,使用文本字段手动输入文件名。
操 作 按 钮
操作栏包含可用于管理文件的一系列按钮。
操作栏右侧的“备份”操作支持将当前选定的文件和目录备份到所需位置和 USB。仅当外部介
质连接到 USB 端口时,“备份”操作才会启用。
UR5e 230 用 户 手 册
29.程 序和 安装 管理 器
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。