参 考 手 册.pdf - 第83页
BM123 参考手册 5.1 概要 E36RCC-60- 010-A0 5.1-2
BM123
参考手册
5.1 概要
E36RCC-60-010-A0
5.1-1
5.1. 概要
E36RCC-60-010-A0
5.1.1 概要
设备的系统在出厂前已事先进行了调整、设定。
请根据需要进行变更。
=注意=
用于系统设定的数据只能由接受过相应教育的人员完成,设定人员应非常熟悉该设定可能引起的变化。
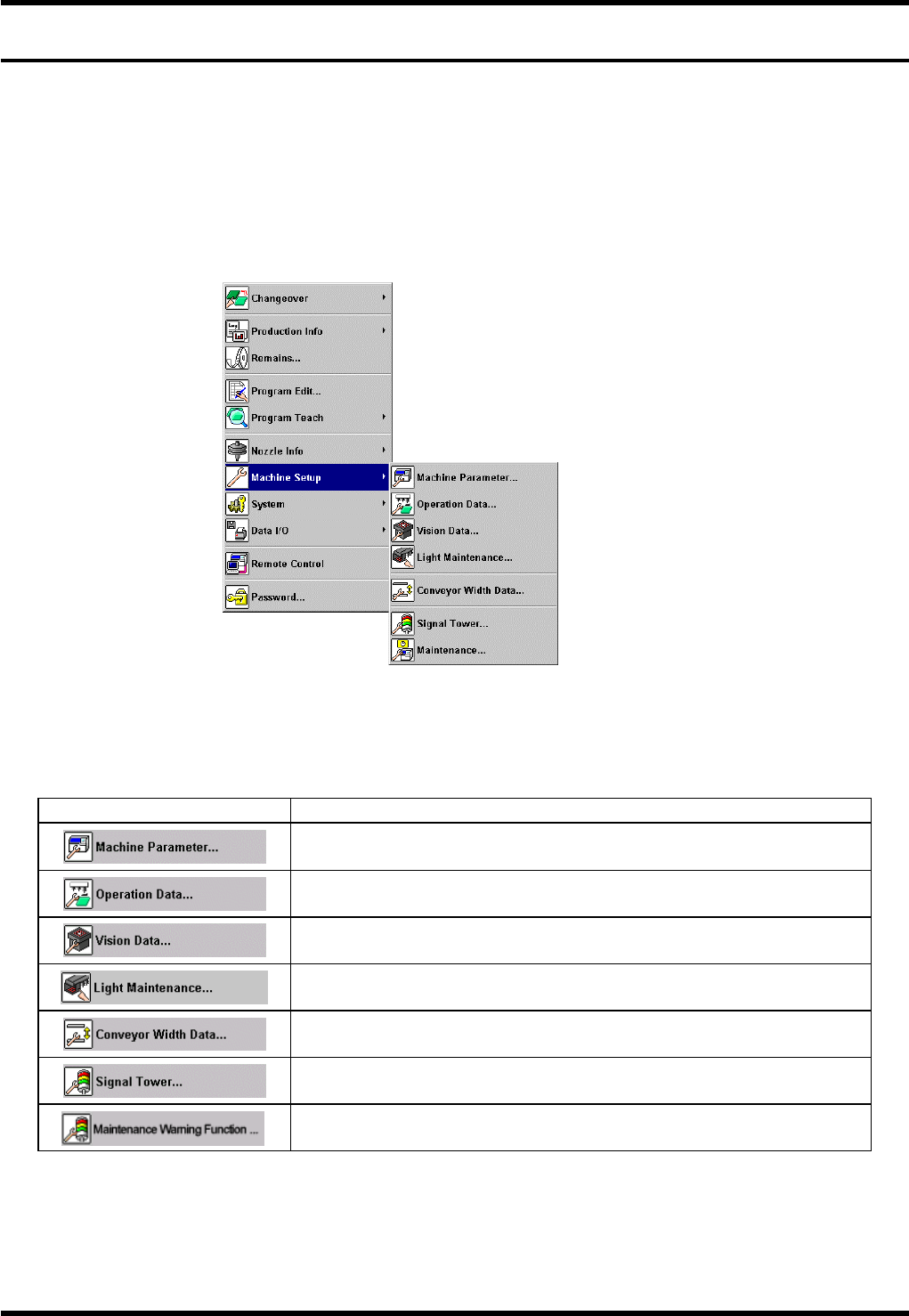
5.1.2 机器设定的菜单
=提示=
<Machine Setup> (机器设定) 可在操作级别 3 上使用 (出厂时设定)
== 关于操作级别的变更和操作级别的用户化,请参照 ‘Ref. / 系统设定 / 操作级别设定’。
按钮 概要
根据主基板进行的偏移校准、基板到达传感器位置、基板基准位置、上载
导轨定时器等
设定用于重试次数、后侧元件供给方向、NG 贴装头等运转的详细条件
设定各种识别照相机的条件。包括校准。
对贴装头照相机的照度进行诊断和调整。
这是调整搬送导轨宽度的数据。(选购规格)
设定发生错误时信号塔的亮灯方法。
对维护所需的设备元件设定警告值。

BM123
参考手册
5.1 概要
E36RCC-60-010-A0
5.1-2
BM123
参考手册
5.2 机器参数的设定
E36RCC-60-020-A0
5.2-1
5.2. 机器参数的设定
E36RCC-60-020-A0
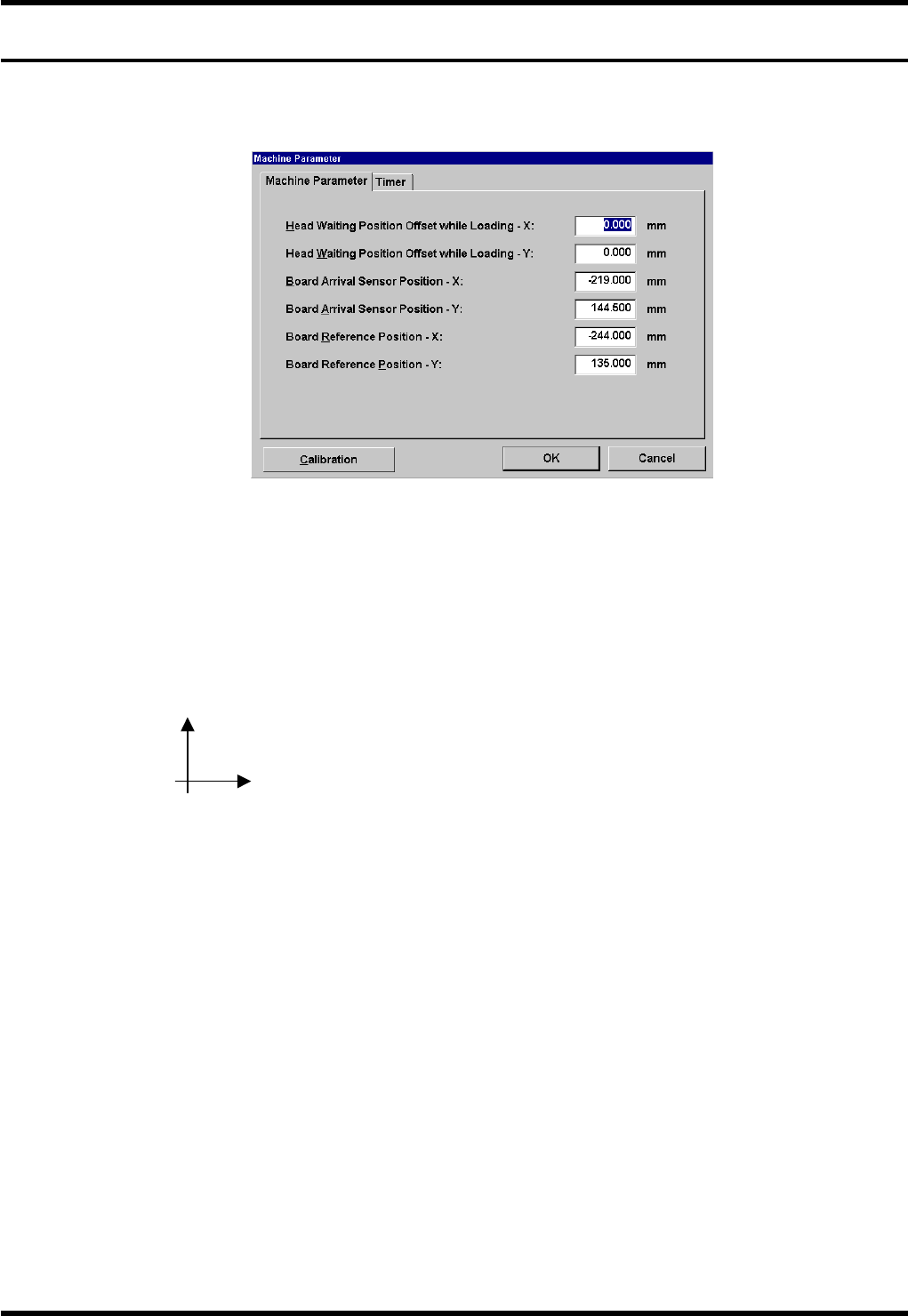
5.2.1 [Machine Parameter] (机器参数)
基板搬送时贴装头待机位置偏移 X,Y
当到达传感器的位置和第 1 点的基板标记之间的距离在设定值以内时,在所输入的偏移值的位置上
将贴装头置于待机状态。
如果对基板的贴装作业结束,贴装头虽然会移动到下一个基板的第 1 个标记位置,但由于贴装头此时离基
板到达检测传感器较近,传感器会将贴装头误认为是基板,从而有可能导致误动作。
为防止出现此问题,应使贴装头退避。
输入范围:-999.999 ~ +999.999 mm
方向:从机器正面看
基板到达传感器位置 X,Y
这是机器原点 (H1 基准位置) 与基板到达传感器位置之间的距离。
输入范围:-999.999 ~ +999.999 mm
基板基准位置 X,Y
这是机器原点 (H1 基准位置) 与基板原点之间的距离。
输入范围:-999.999 ~ +999.999 mm
=提示= 坐标的判断
基板止动器及固定导轨侧的基板端面成为基板基准位置。
此位置成为上述基板基准位置 (X,Y)。
通过使用主基板 (选购件) 的 < Calibration > (校准) 进行计测。
根据止动器位置而定出以下位置。
+Y:内
+X:右