参 考 手 册.pdf - 第89页
BM123 参考手册 5.2 机器 参数的设定 E36RCC-60- 020-A0 5.2-6 : ‘Machin e Param eter’ ( 机器参数 ) : ‘Measur ing off set’ ( 偏移计测 ) 10. 用操作盘的示教键 可将标记中心显示在照 相机中心。 11. <Meas ure> ( 计测 ) : ‘Succ essf ul recognit ion’ ( 识别成功 ) 12. <OK…
BM123
参考手册
5.2 机器参数的设定
E36RCC-60-020-A0
5.2-5
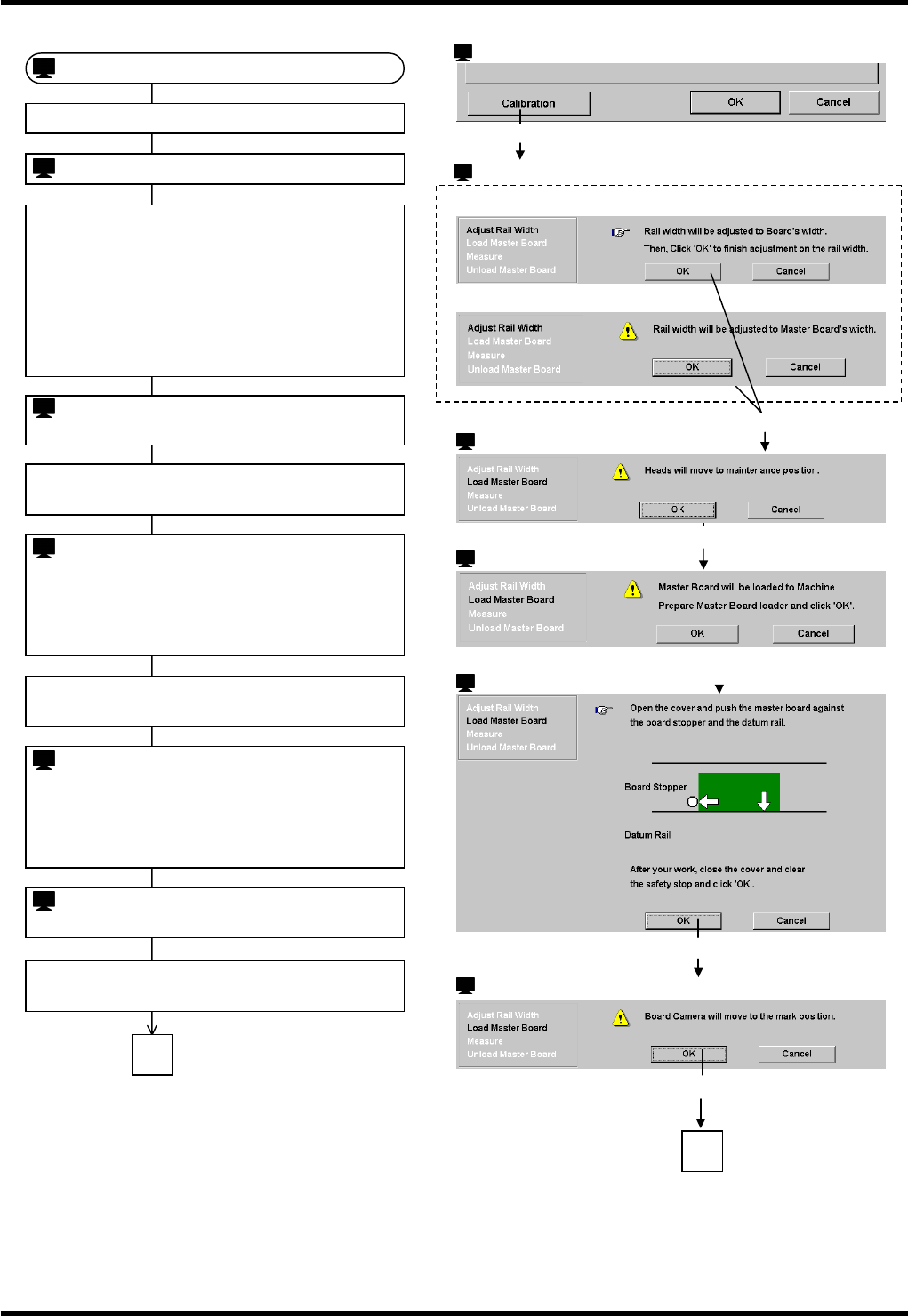
基板基准位置校准
=提示= 2
未返回原点时,会显示 ‘Origin Return Instruction’ (返回原点指示) 画面,届时请返回原点。
1.
<Calibration> (校准)
:‘Machine Parameter’
:‘Load Master Board’ (基板搬入)
5.
将主基板放置到上载导轨上。
<OK>
:‘Confirmation of board camera move’ (基板照相机移动确认)
8.
<OK>
:‘Move to maintenance position’ (贴装头待机移动)
3.
<OK>
1
=提示= 2
:‘Adjusting rail width’ (导轨宽度调整)
2.
无自动宽度调整时
与导轨宽度对齐后,点击 <OK>。
有自动宽度调整时
若点击 <OK>,则导轨移动。
:‘Instruction of board setting’ (基板设置指示)
7.
正确设置基板。
请参照前项的 ‘基板的设置方法’。
<OK>
4.
贴装头移动到待机位置。
6.
主基板移动到工作台。
9.
基板照相机向基板标记移动。
:‘Machine Parameter’
1.
:‘Move to maintenance position’ (贴装头待机移动)
3.
:‘Adjusting rail width’ (导轨宽度调整)
无
自动宽度
调
整时
有自动宽度
调
整时
2.
:‘Load Master Board’ (基板搬入)
5.
:‘Instruction of board setting’ (基板设置指示)
7.
:‘Confirmation of board camera move’ (基板照相机移动确认)
1
8.
BM123
参考手册
5.2 机器参数的设定
E36RCC-60-020-A0
5.2-6
:‘Machine Parameter’ (机器参数)
:‘Measuring offset’ (偏移计测)
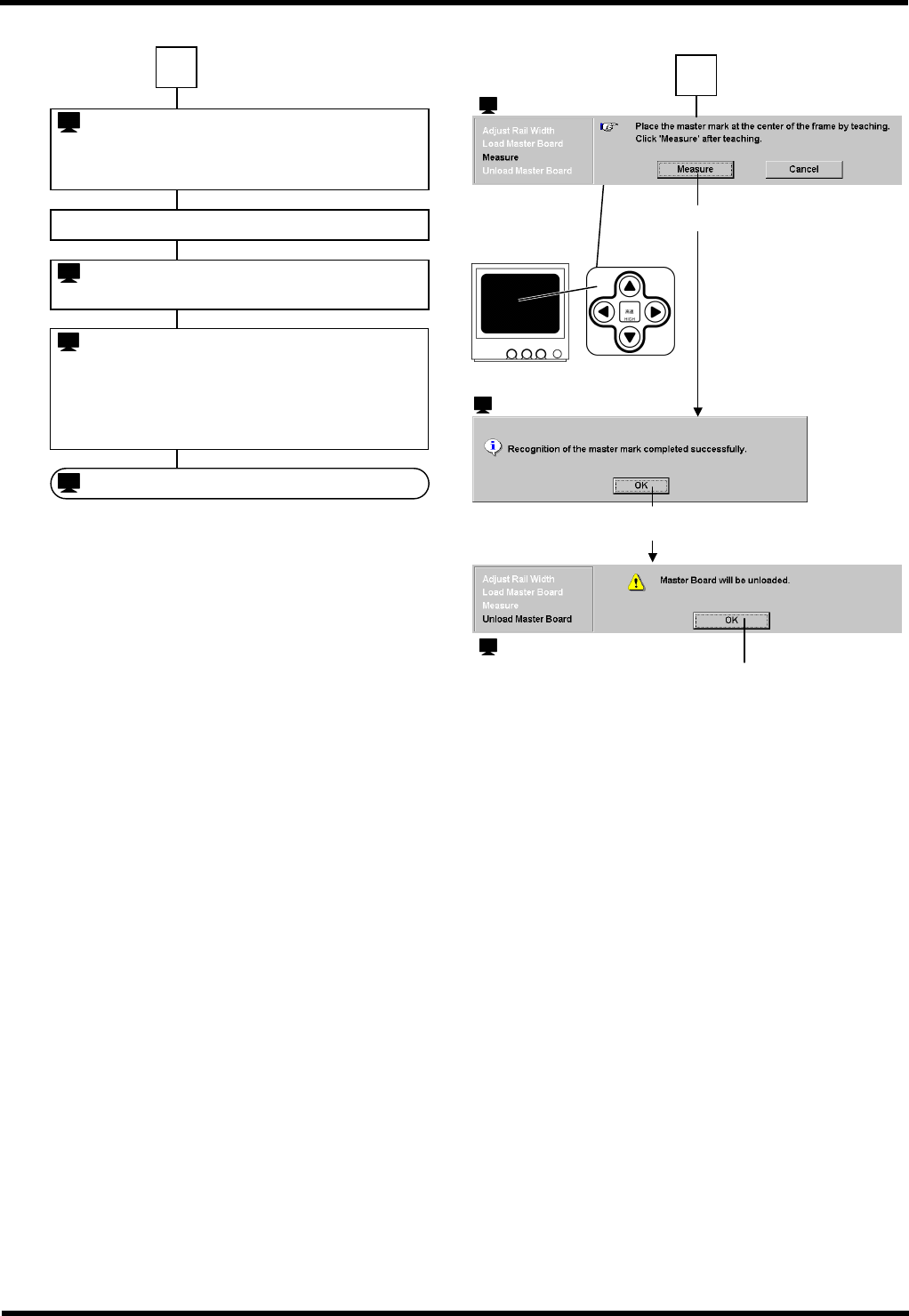
10.
用操作盘的示教键
可将标记中心显示在照相机中心。
11.
<Measure> (计测)
:‘Successful recognition’ (识别成功)
12.
<OK>
1
:‘Unloading master board’ (主基板取出)
13.
请取出基板。
<OK>
:‘Successful recognition’ (识别成功)
10.
12.
:‘Measurin
g
offset’
(
偏移计测
)
11.
1
:‘Unloading master board’ (主基板取出)
13.
BM123
参考手册
5.3 运转条件数据的设定
E36RCC-60-270-A0
5.3-1
5.3. 运转条件数据的设定
E36RCC-60-270-A0
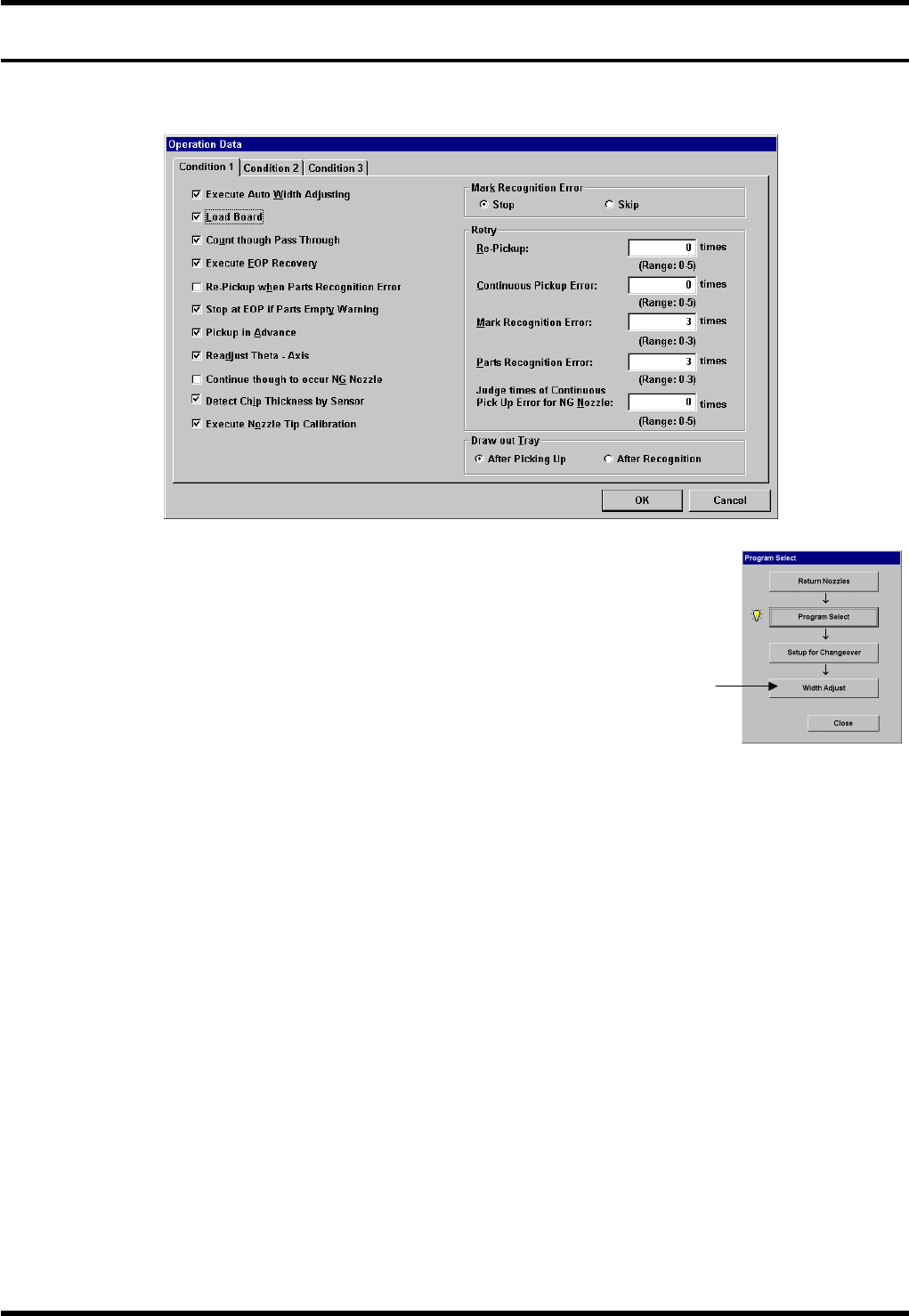
5.3.1 [Condition 1] (运转条件 1)
自动宽度调整
本功能是选购项目。未配置有本功能的设备不能进行设定。
品种切换时,应将自动宽度调整用的按钮置为有效。
在 OFF 状态下,品种切换的 <Width Adjust> (自动宽度调整) 变为无效。
基板搬送动作
在 AUTO 模式下,按 “START” (开始) 时,如果贴装位置有基板,则排出基板,并在搬入新的基板后进
行贴装。
在 OFF 状态下,从残留的基板开始生产。不进行基板搬送,敬请注意。
通过计数
机器不进行生产,作为传送带执行通过动作时,计测通过基板的枚数。
EOP 恢复
在生产过程中发生元件用完时,将跳过该元件,一直执行到 EOP。
所跳过的元件在元件交换完成后通过 < Recovery> (恢复) 进行贴装。
元件识别错误发生后进行再次吸附
发生了元件识别错误后,机器不会停止,而是尝试进行再次吸附,直到所设定的恢复次数为止。
为了对识别错误进行分析而需进行图像保存等时,置于 OFF。
置于 OFF 后,则不论是否有恢复次数,均作错误停止。
=提示=
根据 ‘元件程序库 / [动作 2]’,对 ‘有再次吸附’ 进行检查时,此项目变为有效。
未被检查时,则不论此项目是否进行检查,错误发生时均停止。