2022060907332027.pdf - 第125页
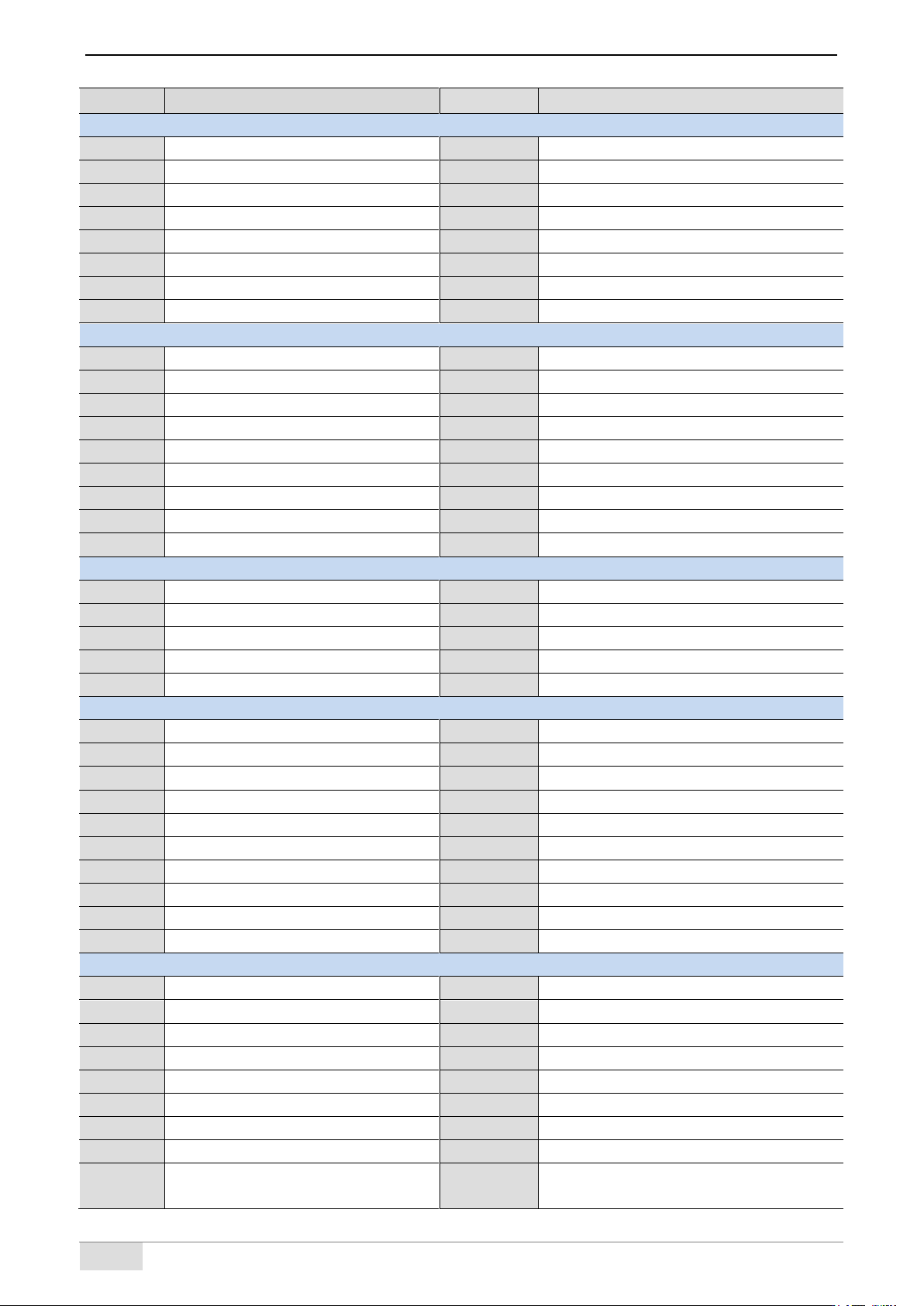
附录 XD/XL 系列可编程控制器 用户手册 【硬 件篇】 111 助记符 功 能 助记符 功 能 时钟运算 TRD 时钟数据读取 TSUB 时钟数据减法运 算 TWR 时钟数据写入 HT O S 时、分、秒数据 转换成秒 MOV 精确时钟 BD 板数据读取 STO H 秒数据转换成时 、分、秒 TO 精确时钟 BD 板数据写入 TCMP 时间(时、分、 秒)比较指令 T ADD 时钟数据加法运 算 DACMP 日期(年、月、 日)比较…
XD/XL 系列可编程控制器用户手册【硬件篇】 附录
110
助记符
功 能
助记符
功 能
数据传送
CMP
※
1
数据的比较
EMOV
浮点数传送
ZCP
※
1
数据的区间比较
FWRT
※
1
FlashROM 的写入
MOV
※
1
传送
MSET
批次置位
BMOV
数据块传送
ZRST
批次复位
PMOV
数据块传送
SWAP
高低字节交换
FMOV
※
1
多点重复传送
XCH
※
1
两个数据交换
QCMP
64 位数据比较
QMOV
64 位传送
EDMOV
双精度浮点数传送
QFWRT
64 位 FlashROM 的写入
数据运算
ADD
※
1
加法
MEAN
※
1
求平均值
SUB
※
1
减法
WAND
※
1
逻辑与
MUL
※
1
乘法
WOR
※
1
逻辑或
DIV
※
1
除法
WXOR
※
1
逻辑异或
INC
※
1
加 1
CML
※
1
取反
DEC
※
1
减 1
NEG
※
1
求负
QADD
64 位加法
QSUB
64 位减法
QMUL
64 位乘法
QDIV
64 位除法
QINC
64 位加 1
QDEC
64 位减 1
数据移位
SHL
※
1
算术左移
ROR
※
1
循环右移
SHR
※
1
算术右移
SFTL
※
1
位左移
LSL
※
1
逻辑左移
SFTR
※
1
位右移
LSR
※
1
逻辑右移
WSFL
字左移
ROL
※
1
循环左移
WSFR
字右移
数据转换
WTD
单字整数转双字整数
ASCI
16 进制转 ASCⅡ
FLT
※
1
16 位整数转浮点数
HEX
ASCⅡ转 16 进制
FLTD
※
1
64 位整数转浮点数
DECO
译码
INT
※
1
浮点转整数
ENCO
高位编码
BIN
BCD 转二进制
ENCOL
低位编码
BCD
二进制转 BCD
DWTD
双字整数转四字整数
BDWTD
双字整数转四字整数批次转换
ECON
浮点数转双精度浮点数
BECON
浮点数转双精度浮点数批次转换
DFLTD
双字整数转双精度浮点数
QFLTD
64 位整数转双精度浮点数
DINTD
双精度浮点数转双字整数
QINTD
双精度浮点数转 64 位整数
浮点运算
ECMP
※
2
浮点数比较
SIN
※
2
浮点数 SIN 运算
EZCP
※
2
浮点数区间比较
COS
※
2
浮点数 COS 运算
EADD
※
2
浮点数加法
TAN
※
2
浮点数 TAN 运算
ESUB
※
2
浮点数减法
ASIN
※
2
浮点数反 SIN 运算
EMUL
※
2
浮点数乘法
ACOS
※
2
浮点数反 COS 运算
EDIV
※
2
浮点数除法
ATAN
※
2
浮点数反 TAN 运算
ESQR
※
2
浮点数开方
EDCMP
双精度比较
EDADD
双精度加法
EDSUB
双精度减法
EDMUL
双精度乘法
EDDIV
双精度除法
附录 XD/XL 系列可编程控制器用户手册【硬件篇】
111
助记符
功 能
助记符
功 能
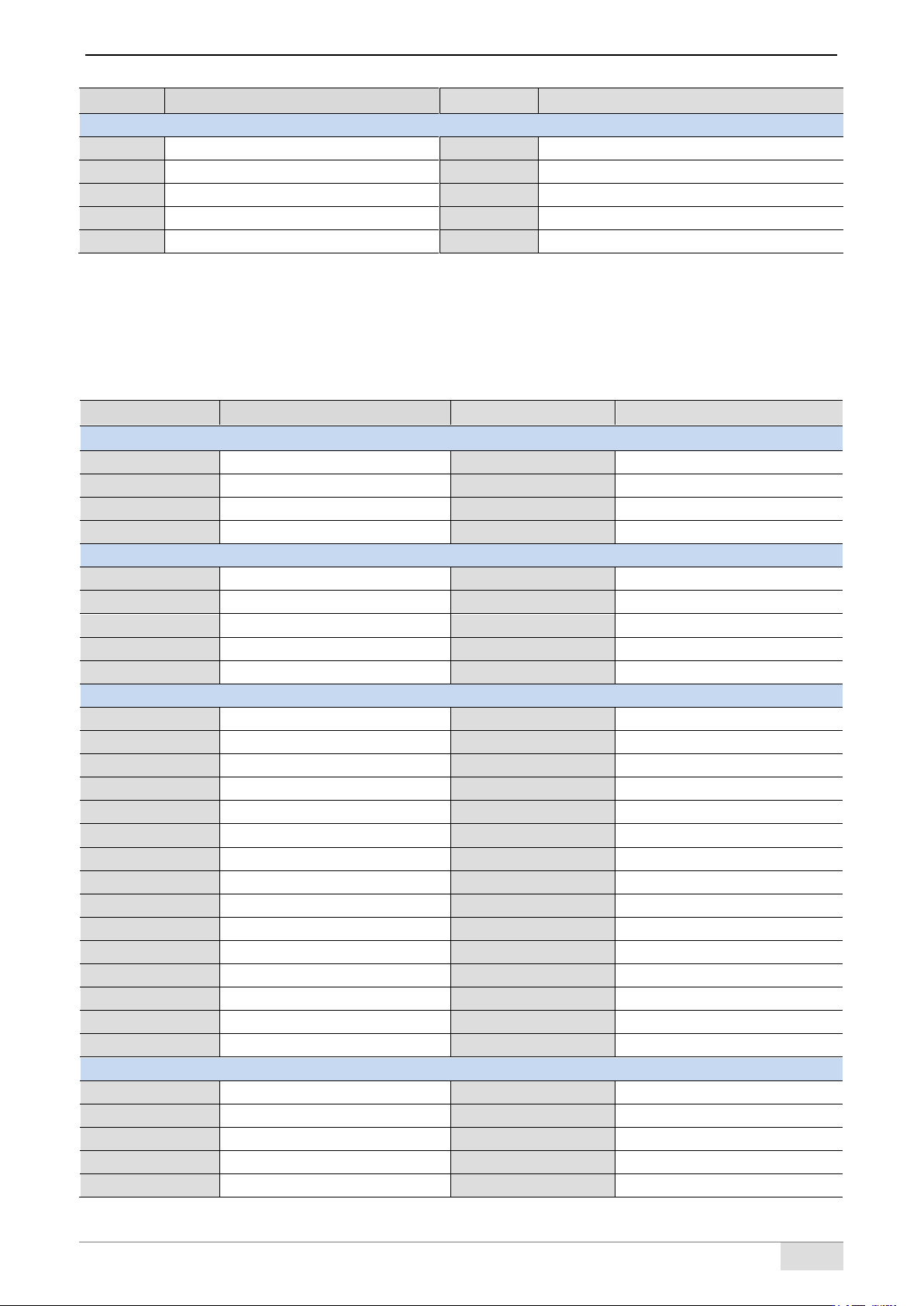
时钟运算
TRD
时钟数据读取
TSUB
时钟数据减法运算
TWR
时钟数据写入
HTOS
时、分、秒数据转换成秒
MOV
精确时钟 BD 板数据读取
STOH
秒数据转换成时、分、秒
TO
精确时钟 BD 板数据写入
TCMP
时间(时、分、秒)比较指令
TADD
时钟数据加法运算
DACMP
日期(年、月、日)比较指令
【注】:
※1:如无特别说明,指令一般为 16 位,并且不具有 32 位指令形式。以※1 标识的指令具有 32 位指令
形式,一般 32 位指令的表达为其相应的 16 位指令前加“D”,如 ADD 的 32 位指令为 DADD。
※2:以※2 标识的指令为 32 位指令,并且不具有 16 位指令形式。
附录 2-3. 特殊指令一览
助记符
功 能
助记符
功 能
定位控制
PLSR
※
2
多段脉冲输出
STOP
脉冲停止
PLSF
※
2
可变频率脉冲输出
GOON
脉冲继续
DRVI
※
2
相对单段脉冲输出
ZRN
※
2
机械原点回归
DRVA
※
2
绝对单段脉冲输出
运动控制
DRV
快速定位
DRVR
快速定位(极坐标)
LIN
直线插补
CW
顺圆弧(圆心坐标)
CCW
逆圆弧(圆心坐标)
CW_R
顺圆弧(圆半径)
CCW_R
逆圆弧(圆半径)
ARC
三点圆弧
FOLLOW
随动(单相递增模式)
FOLLOW_AB
随动(AB 相模式)
ETHERCAT 总线-H 运动-单轴功能
A_PWR
轴使能
A_RST
轴错误清除
A_WRITE
修改电气原点
A_MODE
修改控制模式
A_STOP
停止运动
A_HALT
暂停
A_MOVEA
绝对位置运动
A_MOVER
相对位置运动
A_CMOVEA
绝对位置持续运动
A_CMOVER
相对位置持续运动
A_VELMOVE
速度控制运动
A_MOVESUP
叠加运动
A_HOME
HM 回原
A_ZRN
回原点
A_GEARIN
齿轮绑定
A_GEAROUT
齿轮解绑
A_DRVA
简易绝对位置运动
A_DRVI
简易相对位置运动
A_PROBE
探针功能
A_CYCPOS
周期位置控制运动
A_CYCVEL
周期速度控制运动
A_CYCTRQ
周期转矩控制运动
A_PLSR
多段速度位移
A_PLSF
可变速度输出
A_FOLLOW
脉冲跟随
A_CYCSUP
周期叠加
A_PITCHCOMP
螺距补偿
A_BACKLASHCOMP
背隙补偿
X_UPDATEPARA
不断电更新
ETHERCAT 总线-H 运动-轴组功能
G_PWR
轴组使能
G_CFGAXIS
修改构成轴
G_PTP
点到点运动
G_LINE
直线插补
G_CIRCLE
圆弧插补
G_HELICAL
螺旋线运动
G_MOVSUP
叠加运动
G_COMPON
补偿运动
G_COMPOFF
补偿取消
G_INTR
中断运动
XD/XL 系列可编程控制器用户手册【硬件篇】 附录
112
助记符
功 能
助记符
功 能
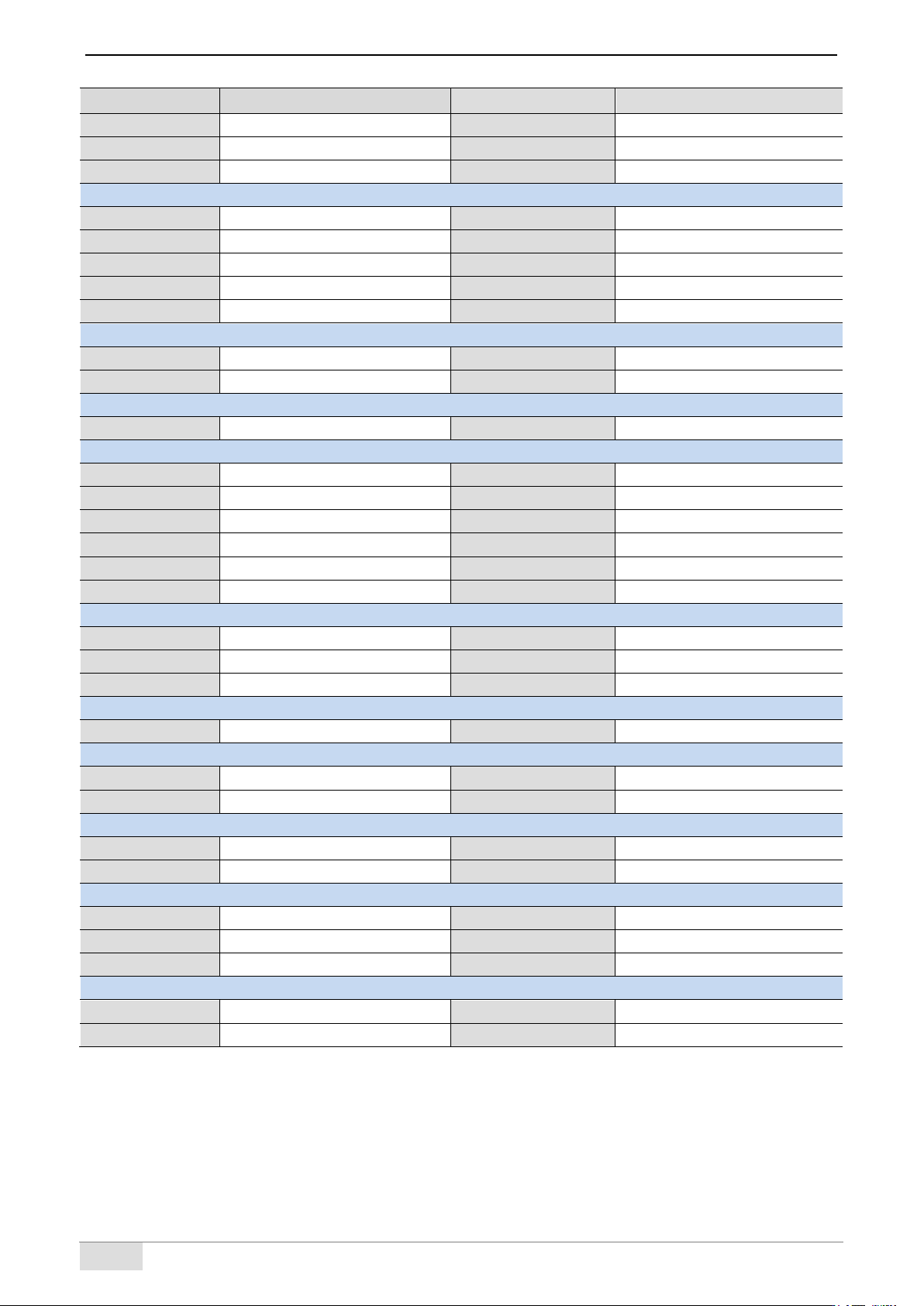
G_GOON
继续运动
G_PATHMODE
指定路径模式选择
G_PATHSEL
选择加工路径
G_PATHMOV
路径运动
G_SETOVRD
修改倍率
ETHERCAT 总线-H 运动-凸轮功能
CAMTBLSEL
凸轮表加载
CAMIN
凸轮启动
CAMOUT
凸轮解除
CAMPHASE
相位补偿
CAMRD
凸轮表读
CAMWR
凸轮表写
CAMPOINTADD
关键点增加
CAMPOINTDEL
关键点删除
CAMTBLDEL
凸轮表卸载
高速计数
CNT
※
2
单相高速计数
RST
高速计数器复位
CNT_AB
※
2
AB 相高速计数
DMOV
※
2
高速计数读取或写入
高速计数中断
CNT
※
2
单相 100 段高速计数(带中断)
CNT_AB
※
2
AB 相 100 段高速计数(带中断)
MODBUS、自由格式通讯
COLR
MODBUS 线圈读
REGR
MODBUS 寄存器读
INPR
MODBUS 输入线圈读
INRR
MODBUS 输入寄存器读
COLW
MODBUS 单个线圈写
REGW
MODBUS 单个寄存器写
MCLW
MODBUS 多个线圈写
MRGW
MODBUS 多个寄存器写
SEND
自由格式通讯发送数据
RCV
自由格式通讯接收数据
CFGCR
串口参数的读取
CFGCW
串口参数的写入
以太网通讯
S_OPEN
创建 TCP 连接/UDP 端口监听
S_CLOSE
通讯终止
S_SEND
自由格式通讯发送
S_RCV
自由格式通讯接收
M_TCP
MODBUS TCP 通讯
IPSET
IP 地址设置
CANopen 通讯
EC_SDORD
SDO 读指令
EC_SDOWR
SDO 写指令
精确定时
STR
※
2
精确定时
STOP
停止精确定时
DMOV
※
1
读精确定时寄存器
中断
EI
允许中断
IRET
中断返回
DI
禁止中断
BLOCK
SBSTOP
停止 BLOCK 的运行
WAIT
等待
SBGOON
继续执行被暂停的 BLOCK
FROM
读取模块/BD 数据
TO
写入模块/BD 数据
其他
PWM
※
1
脉宽调制
FRQM
频率测量
PID
PID 运算控制
NAME_C
C 函数功能块
【注】:
※1:以※1 标识的指令为 32 位指令,并且不具有 16 位指令形式,其他指令为 16 位。
※2:表格中不包含 X-NET 指令,请查阅《X-NET 总线用户手册》。