EasyOLP_V6.1中文说明书.pdf - 第656页
27-32 lvswG}] lvswG}] 由于喂料器数量范围没有全部设定为 双数, 因此正面与背面的拱架无法在电路板的 前后部位各自进行作业。 下图是 Join 模式下的喂料器数量范围设定值的修改屏幕 及针对该修改作业进行优化 的结果屏幕。 在喂料器数量范围设定值的修改屏幕 上, 上面的 15 个元件由于喂料器数量范围被设 定为双数而可以各自安装在正面与背 面喂料器底座上, 其它元件则由于喂料器数量 范围被设定为 1 , …
27-31
Technical Notes
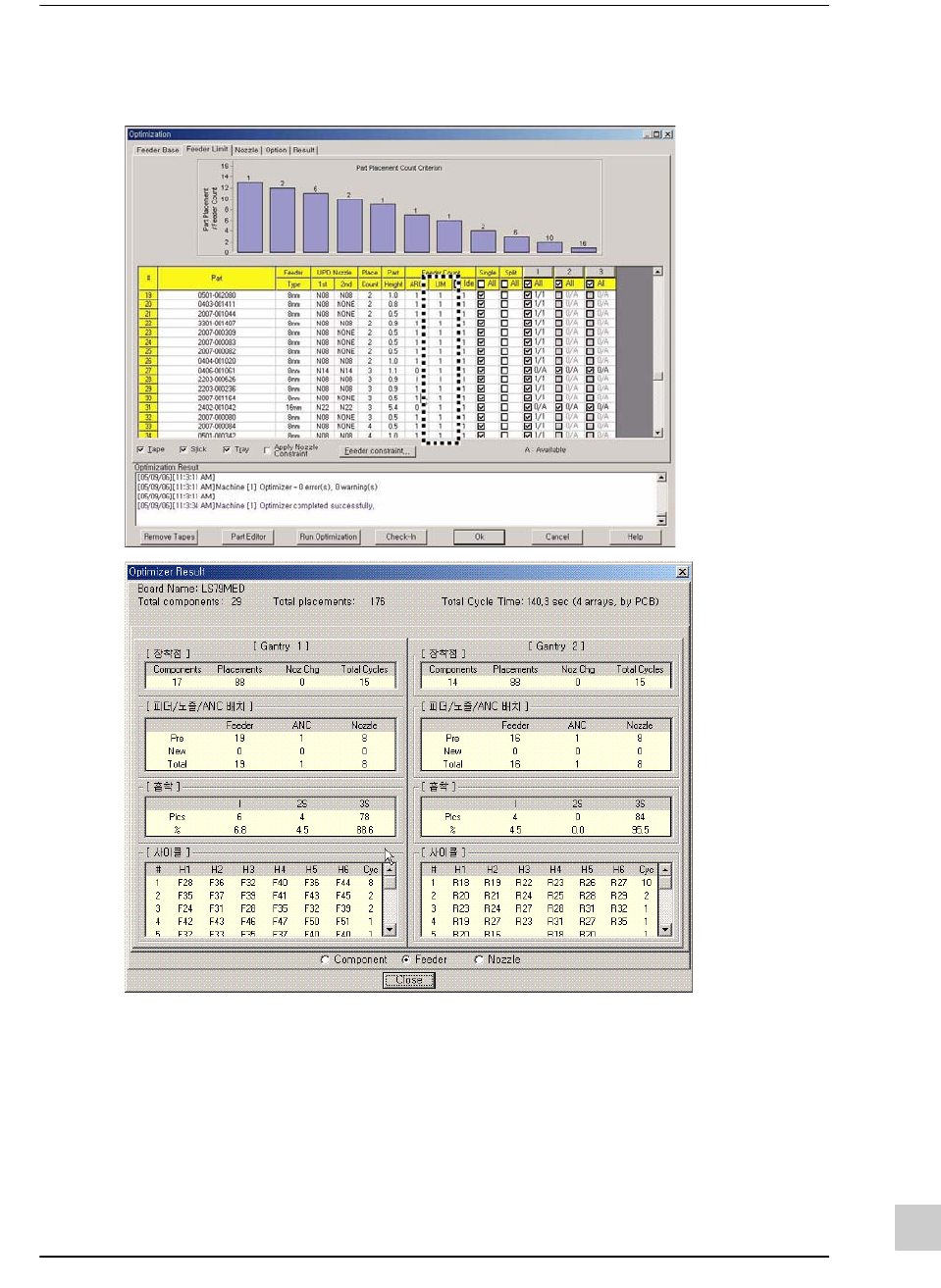
下图是针对作业较多的元件的喂料器数量范围设定及针对该设定的优化结果屏幕。
从结果屏幕上得知,正面与背面拱架的循环数获得了均匀分配。
27.3.2. Join模式
Join模式仅限于CP6 xHP及SM310等使用Dual Conveyor的设备,正面与背面两个拱
架一起对两个电路板进行作业。拟作业的电路板的Y尺寸为 CP6 xHP时仅适用于小
于160mm、SM310 时则仅适用于小于220mm的情形,大于该尺寸时则在Single模式
下进行作业。
27-32
lvswG}]
lvswG}]
由于喂料器数量范围没有全部设定为双数,因此正面与背面的拱架无法在电路板的
前后部位各自进行作业。
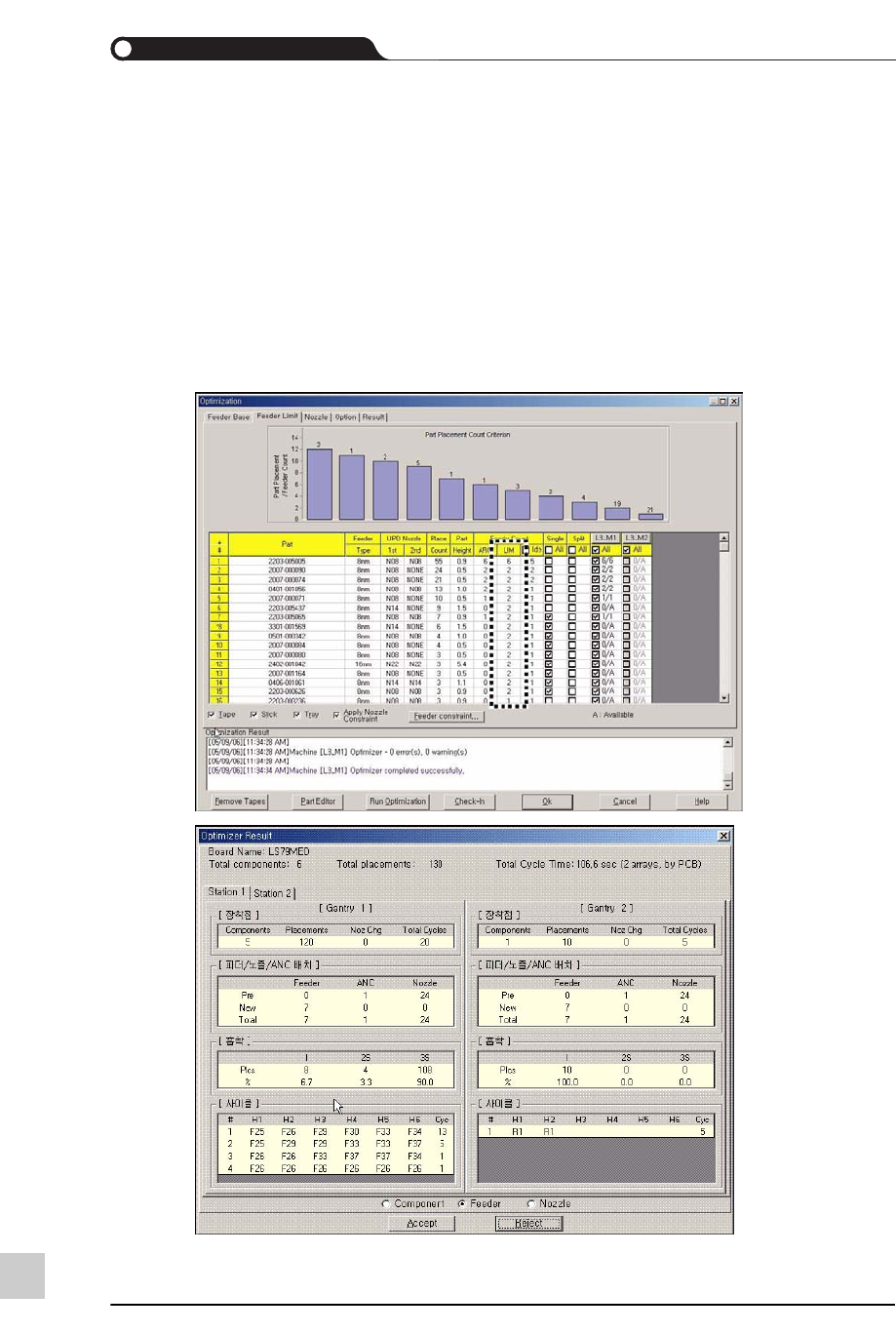
下图是Join模式下的喂料器数量范围设定值的修改屏幕及针对该修改作业进行优化
的结果屏幕。
在喂料器数量范围设定值的修改屏幕上,上面的15个元件由于喂料器数量范围被设
定为双数而可以各自安装在正面与背面喂料器底座上,其它元件则由于喂料器数量
范围被设定为1,
使用安装了该元件的喂料器底座的拱架需要在另一侧的电路板上贴装该元件。上述
情况被称为Dual模式中的Join模式。
27-33
Technical Notes
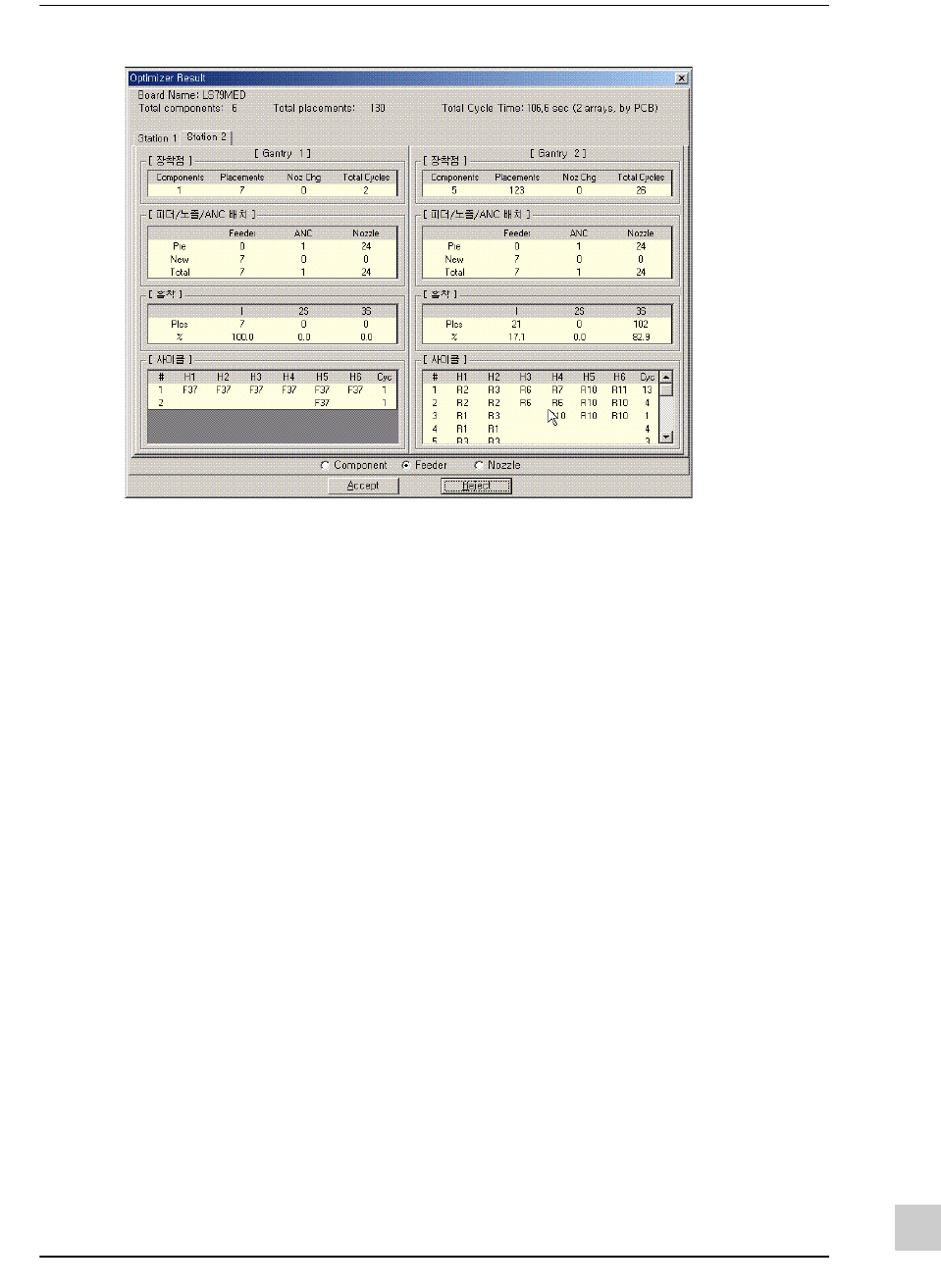
从优化执行结果上可知,正面拱架上分配了大部分的贴装点。Station 1中需要从背
面喂料器底座获取的元件为10个。
Station2中需要从正面喂料器底座获取的元件为7个,这是因为,喂料器数量被限定
为1而只能配置在正面或背面中的一个面后使用。
喂料器被设定为双数时,正/背面拱架均可分配到喂料器并且对靠近自己的电路板
进行作业。但喂料器被设定为单数时,必须把作业平均分配给两个拱架,不仅针对
靠近自己的电路板进行作业。
还要对另一侧的电路板进行作业。虽然在优化结果屏幕上优化结果似乎仅偏重于一
侧,但实际作业上却是同时对两个电路板进行作业,因此大幅度地提高了作业效
率。
27.3.3. Twin模式
Twin 模式仅限于使用Dual Conveyor的设备,可以在输送带的前后承载两个电路板,
因此由两个拱架对两个电路板进行作业。
在正/背面拱架上承载两个电路板时,仅对靠近自己的电路板进行作业。准备进行作
业的电路板的Y尺寸为CP6xHP时仅适用于小于160mm、SM310时则仅适用于小于
220mm的情形。喂料器数量范围全部被设定为双数,电路板的Y尺寸也符合该条件
时,Optimizer基本上会在Twin 模式下进行作业。
下图是Twin 模式下的喂料器数量范围设定值的修改与优化结果屏幕。所有元件的喂
料器数量范围被设定为双数,因此均匀地安装在正面与背面喂料器底座上,各拱架
仅对靠近自己的电路板进行作业。